基于栅格化3d打印分区路径规划方法
技术领域
1.本发明涉及3d打印技术领域,尤其涉及基于栅格化3d打印分区路径规划方法。
背景技术:
2.对于3d打印技术,在轮廓内部生成较优的填充路径是降低零件成型时间,提高生产效率的关键技术之一。其内部填充路径包含两个部分:打印路径与空路径。打印路径是喷头填充成型材料的路径,而空路径是遇孔洞、转弯等情形时需要关闭喷头的路径。过多的空路径不仅会增加填充时间,降低成型效率,还会导致喷头的频繁通断。
3.目前常用的路径规划方法有两种,平行线填充路径与偏执轮廓填充路径。但是其也存在以下问题:对于轮廓较多的复杂零件,这种路径生成算法就要处理轮廓偏置后出现的自相交、互相交等问题,涉及多边形布尔运算问题,使算法相对复杂,路径生成速度较慢,并且生成的路径轨迹中存在大量的曲线,填充速度较低,影响填充速度。两种方法在面对不规则孔洞模型时会产生大量空行程,会造成产品拉丝、翘边等缺陷。
技术实现要素:
4.发明目的:为了解决孔洞模型的3d打印容易产品拉丝、翘边的问题,本发明提供基于栅格化3d打印分区路径规划方法,根据蚁群算法获取区间遍历最小路径,减少模型中空路径长度。
5.技术方案:基于栅格化3d打印分区路径规划方法,包括以下步骤:
6.(1)选取具有孔洞结构的模型并通过切层软件得到填充区域与轮廓;
7.(2)将所得到的填充区域进行栅格化处理,得到填充单元格与非填充单元格;
8.(3)将栅格化后的填充区域置于坐标轴中,按照矩形分区原则将单元格划分为多个矩形区间;
9.(4)运用中点坐标公式求解出每个矩形的中心点坐标(x1,y1),(x2,y2)...(xn,yn),并记为起始集合点r={s1,s2,
…
,sn};
10.(5)运用蚁群算法求解出遍历所有起始点的最短路径,蚁群算法遍历所有起始点得出的路径即为每个矩形区间的遍历顺序;
11.(6)根据得到的矩形区间遍历顺序设置起始点,按照直线填充方式对矩形区域进行填充;
12.(7)沿起始点开始采用平行直线填充方式,将访问过的单元格标记从0变成1,遇拐角处需按照上下左右四个方位寻找临近点,如没有填充单元格,则需回溯至上一点按照上下左右四个方位寻找临近点,直至找到下一区间起始点位置;
13.(8)遍历过的单元格值会发生改变直至所有单元格遍历完成单元格数字变为1,则最终得到填充路径。
14.所述步骤(2)中栅格化后单元格的大小根据填充率的变换而改变,其长度范围为0.1mm~1mm,对应填充率为100%~10%。
15.所述步骤(2)中对栅格化后单元格进行数字赋值,其中填充单元格标记为0,非填充单元格标记为1。
16.所述步骤(3)中,将栅格化后的填充区域置于坐标轴中,设置纵向虚拟分割线沿着x轴正方向扫描,在不规则孔洞区域y值发生变化时留下虚拟分割线标记,通过此方法将打印区间划分为多个矩形。
17.所述步骤(4)中将每个矩形的中心点坐标视为蚁群算法遍历集合点。
18.所述步骤(5)运用蚁群算法的方法为:初始化蚁群算法基本参数,蚂蚁数量m,信息启发因子α,期望启发因子β,信息挥发素ρ,信息素强度q;将m只蚂蚁随机放在起始点上,则蚂蚁k按照下式进行选择下一个节点,
[0019][0020]
蚂蚁k依次完成对有所质点的遍历。
[0021]
所述步骤(5)中蚁群算法设蚂蚁每访问一条区间就会留下信息素,信息素会影响蚁群对下一个节点选择的判断,因此在算法中每一只蚂蚁到达下一个节点都需要对各个起始点做信息素更新处理,更新机制如下公式:
[0022]
τ
ij
(t n)=ρ
·
τ
ij
(t) δτ
ij
[0023][0024]
当蚁群中m只蚂蚁全部到达终点后所形成的路径即为区间遍历顺序。
[0025]
所述步骤(6)中起始点的位置为蚁群算法求得的区间遍历顺序中最先遍历区间的边界处。
[0026]
有益效果:与现有技术相比,本发明具有如下显著优点:
[0027]
针对孔洞模型,减少模型中空路径长度,降低产品拉丝、翘边的风险,提升打印效率与成型质量;算法复杂度低,路径生成速度较快。
附图说明
[0028]
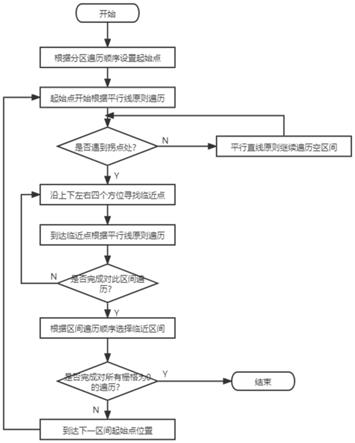
图1为基于栅格化3d打印分区路径规划方法的流程图;
[0029]
图2为切层后获取的轮廓图;
[0030]
图3为对模型单层图栅格化处理后的效果图;
[0031]
图4为栅格矩形分区后根据蚁群算法求出区间遍历顺序;
[0032]
图5为对区间1完成路径规划后选择区间2的临界点位置。
具体实施方式
[0033]
下面结合附图对本发明的技术方案作进一步说明。
[0034]
基于栅格化3d打印分区路径规划方法,如图1所示,包括以下步骤:
[0035]
(1)选取具有孔洞结构的模型并通过切层软件得到填充区域与轮廓,模型轮廓图如图2所示,其中内部的椭圆1为孔洞形状,外层矩形2为模型轮廓,阴影区域3为填充路径;
[0036]
(2)将所得到的填充区域进行栅格化处理,得到填充单元格与非填充单元格:通过栅格法对模型建模,将整个目标区域划分为正方形单元格,其中正方形单元格的大小由填充率和填充材料决定,填充率越高单元格越小;
[0037]
如图3所示,我们将需要填充单元格视为白色并标记为0,非填充单元格视为黑色并标记为1,如果孔洞只占有一部分单元格时也被视为黑色并标记为1,例如椭圆的边界处,以此方法决定哪些区域需要填充;
[0038]
(3)将栅格化后的填充区域置于坐标轴中,按照矩形分区原则将单元格划分为多个矩形区间:将栅格化后图层置于坐标轴中,设置纵向虚拟分割线沿着x轴正方形扫描,在不规则孔洞区域y值发生变化时留下虚拟分割线标记,通过此方法将打印区间划分为多个矩形,如图3所示,图形被分为8个矩形分区;
[0039]
(4)假设分区后有个矩形分区,在划分的矩形分区中,运用中点坐标公式求解出每个矩形的中心点坐标(x1,y1),(x2,y2)...(xn,yn),并记为起始集合点r={s1,s2,
…
,sn};将求得的所有中心坐标视为旅行商情形,这样访问区域转换成为tsp问题,根据蚁群算法来决定分区后的每个区间遍历顺序;
[0040]
(5)运用蚁群算法求解出遍历所有起始点的最短路径,蚁群算法遍历所有起始点得出的路径即为每个矩形区间的遍历顺序;
[0041]
(6)根据得到的矩形区间遍历顺序设置起始点,按照直线填充方式对矩形区域进行填充;
[0042]
(7)如图5所示,沿起始点开始采用平行直线填充方式,将访问过的单元格标记从0变成1,遇拐角处需按照上下左右四个方位寻找临近点,如没有填充单元格,则需回溯至上一点按照上下左右四个方位寻找临近点,直至找到下一区间起始点位置;
[0043]
(8)遍历过的单元格值会发生改变直至所有单元格遍历完成单元格数字变为1,则最终得到填充路径。
[0044]
所述步骤(2)中栅格化后单元格的大小根据填充率的变换而改变,其长度范围为0.1mm~1mm,对应填充率为100%~10%。
[0045]
所述步骤(2)中对栅格化后单元格进行数字赋值,其中填充单元格标记为0,非填充单元格标记为1。
[0046]
所述步骤(3)中,将栅格化后的填充区域置于坐标轴中,设置纵向虚拟分割线沿着x轴正方向扫描,在不规则孔洞区域y值发生变化时留下虚拟分割线标记,通过此方法将打印区间划分为多个矩形。
[0047]
所述步骤(4)中将每个矩形的中心点坐标视为蚁群算法遍历集合点。
[0048]
所述步骤(5)运用蚁群算法的方法为:初始化蚁群算法基本参数,蚂蚁数量m,信息启发因子α,期望启发因子β,信息挥发素ρ,信息素强度q;将m只蚂蚁随机放在起始点上,则蚂蚁k按照下式进行选择下一个节点,
[0049][0050]
蚂蚁k依次完成对有所质点的遍历。
[0051]
所述步骤(5)中蚁群算法设蚂蚁每访问一条区间就会留下信息素,信息素会影响蚁群对下一个节点选择的判断,因此在算法中每一只蚂蚁到达下一个节点都需要对各个起始点做信息素更新处理,更新机制如下公式:
[0052]
τ
ij
(t n)=ρ
·
τ
ij
(t) δτ
ij
[0053][0054]
当蚁群中m只蚂蚁全部到达终点后所形成的路径即为区间遍历顺序,如图4所示,得出8个区间的遍历顺序。
[0055]
所述步骤(6)中起始点的位置为蚁群算法求得的区间遍历顺序中最先遍历区间的边界处。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
