1.本发明涉及拉床技术领域,尤其涉及一种数控拉床的电控系统。
背景技术:
2.拉床是用拉刀加工工件各种内、外成形表面的机床,能获得较高的尺寸精度和较小的表面粗糙度,生产率高,适用于成批大量生产,按加工表面不同,拉床可分为内拉床和外拉床,内拉床用于拉削内表面,如花键孔、方孔等,外拉床用于外表面拉削,拉床按整体结构和布局形式,分为卧式和立式卧式;但现有的数控拉床上控制系统方面还是停留在较为简单单一的状态,而且会出现自动过程中为达到工件加工质量和效率的要求需要人工干预,目前这种电控系统很难实现,降低了运行效果,另外在生产加工过程很难实时监控拉床油缸的液压输出工作状态,降低了监控效果,而且一般没有夹持结构,导致在对材料不容易进行固定,从而在拉削时容易左右晃动,从而降低了夹持效果,而且不具有搬运结构,导致需要人工进行搬动,降低了搬运效率,且增加了人工负担。
技术实现要素:
3.本发明解决的问题在于提供一种数控拉床的电控系统,可以使控制系统的操作实现多样化,对于人工干预的操作也可以适应,从而提高了运行效果,而且可以生产过程中对设备状态进行监控,避免发生设备损坏,提高了监控效果,而且可以对材料进行夹持,避免在拉削时左右晃动,提高了夹持效果,而且可以将设备进行移动,无需人工进行搬运,提高了搬运效率,且降低了人工负担。
4.为了实现上述目的,本发明采用了如下技术方案:
5.一种数控拉床的电控系统,包括拉床主体、电控系统、夹持组件、底座和升降转运组件,所述拉床主体的一侧内壁上固定有电控系统,所述拉床主体的顶端外壁上固定有夹持组件,所述拉床主体的底端外壁上焊接固定有底座,所述底座的底端内壁上固定有升降转运组件;
6.所述电控系统包括控制模块、手动操作模块、半自动操作模块、自动操作模块、人为干预模块、可视化监控模块、油压监控单元、拉削力监控单元、拉销速度监控单元、回程速度监控单元、节拍记录单元和拉削负载记录单元,所述拉床主体的一侧内壁上分别安装有控制模块、手动操作模块、半自动操作模块、自动操作模块、人为干预模块和可视化监控模块,所述可视化监控模块的一侧内壁上分别安装有油压监控单元、拉削力监控单元、拉销速度监控单元、回程速度监控单元、节拍记录单元和拉削负载记录单元。
7.作为本发明进一步的方案:所述夹持组件包括第一滑槽、第一导向杆、移动块、第一滑块、第一导向孔、第一弹簧、气缸、夹持板、第二滑槽、第二导向杆、夹持块、第二滑块、第二导向孔和第二弹簧,所述拉床主体的顶端外壁上对称安装有移动块,所述移动块的底端外壁上焊接固定有第一滑块,所述拉床主体的顶端内壁上对应第一滑块对称开设有第一滑槽,所述第一滑槽之间的内壁上固定连接有第一导向杆,所述第一滑块的一侧内壁上对应
第一导向杆开设有第一导向孔,所述第一滑块的一侧外壁上焊接固定有第一弹簧,所述移动块的一侧内壁上镶嵌安装有气缸,所述拉床主体的顶端外壁上对称安装有夹持板,且气缸的伸缩杆一端固接于夹持板的外壁上,所述夹持板的一侧外壁上对称安装有夹持块,所述夹持块的一侧外壁上焊接固定有第二滑块,所述夹持板的一侧内壁上对应第二滑块开设有第二滑槽,所述第二滑槽之间的内壁上焊接固定有第二导向杆,所述第二滑块的一侧内壁上对应第二导向杆开设有第二导向孔,所述第二滑块之间的外壁上焊接固定有第二弹簧。
8.作为本发明进一步的方案:所述升降转运组件包括收纳槽、升降槽、电机、螺纹杆、升降板、滑板、螺纹孔和万向轮,所述底座的底端内壁上对称开设有收纳槽,所述收纳槽的一侧内壁上安装有升降板,所述升降板的两侧外壁上均焊接固定有滑板,所述收纳槽的两侧内壁上对应滑板均开设有升降槽,所述升降槽的顶端内壁上镶嵌安装有电机,所述升降槽的底端内壁上转动连接有螺纹杆,且电机的输出轴一端固接于螺纹杆的顶端外壁上,所述滑板的一侧内壁上对应螺纹杆开设有螺纹孔,所述升降板的底端外壁上对称安装有万向轮。
9.作为本发明进一步的方案:所述拉床主体的一侧外壁上固定安装有油缸。
10.作为本发明进一步的方案:所述拉床主体的顶端内壁上固定安装有行程机构。
11.作为本发明进一步的方案:所述第一弹簧的一侧内部套接于第一导向杆的外壁上,所述第二弹簧的一侧内部套接于第二导向杆的外壁上。
12.作为本发明进一步的方案:所述电机为一种伺服电机。
13.本发明的有益效果是:采用了电控系统,可以使控制系统的操作实现多样化,对于人工干预的操作也可以适应,从而提高了运行效果,而且可以生产过程中对设备状态进行监控,避免发生设备损坏,提高了监控效果;
14.采用了夹持装置,可以对材料进行夹持,避免在拉削时左右晃动,提高了夹持效果;
15.还采用了升降转运装置,可以将设备进行移动,无需人工进行搬运,提高了搬运效率,且降低了人工负担。
附图说明
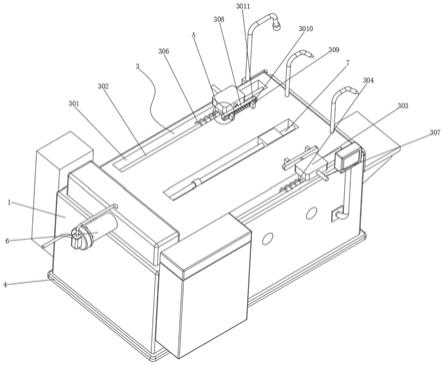
16.图1为本发明的整体立体结构图;
17.图2为本发明图1中的a区域结构图;
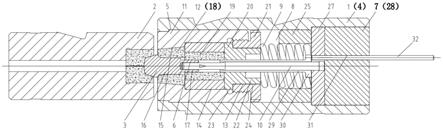
18.图3为本发明的主视剖切结构图;
19.图4为本发明的仰视立体结构图;
20.图5为本发明升降转运组件的侧视剖切结构图;
21.图6为本发明的系统流程图;
22.图例说明:1、拉床主体;2、电控系统;3、夹持组件;4、底座;5、升降转运组件;6、油缸;7、行程机构;201、控制模块;202、手动操作模块;203、半自动操作模块;204、自动操作模块;205、人为干预模块;206、可视化监控模块;2061、油压监控单元;2062、拉削力监控单元;2063、拉销速度监控单元;2064、回程速度监控单元;2065、节拍记录单元;2066、拉削负载记录单元;301、第一滑槽;302、第一导向杆;303、移动块;304、第一滑块;305、第一导向孔;
306、第一弹簧;307、气缸;308、夹持板;309、第二滑槽;3010、第二导向杆;3011、夹持块;3012、第二滑块;3013、第二导向孔;3014、第二弹簧;501、收纳槽;502、升降槽;503、电机;504、螺纹杆;505、升降板;506、滑板;507、螺纹孔;508、万向轮。
具体实施方式
23.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
24.实施例一
25.图3和图6,一种数控拉床的电控系统,包括拉床主体1、电控系统2、夹持组件3、底座4和升降转运组件5,拉床主体1的一侧内壁上固定有电控系统2,拉床主体1的顶端外壁上固定有夹持组件3,拉床主体1的底端外壁上焊接固定有底座4,底座4的底端内壁上固定有升降转运组件5;拉床主体1的一侧外壁上固定安装有油缸6,可以使油缸6为拉削移动提供动力,提高了使用效果;拉床主体1的顶端内壁上固定安装有行程机构7,通过行程机构7带动材料进行移动拉削,提高了使用效果;
26.电控系统2包括控制模块201、手动操作模块202、半自动操作模块203、自动操作模块204、人为干预模块205、可视化监控模块206、油压监控单元2061、拉削力监控单元2062、拉销速度监控单元2063、回程速度监控单元2064、节拍记录单元2065和拉削负载记录单元2066,拉床主体1的一侧内壁上分别安装有控制模块201、手动操作模块202、半自动操作模块203、自动操作模块204、人为干预模块205和可视化监控模块206,可视化监控模块206的一侧内壁上分别安装有油压监控单元2061、拉削力监控单元2062、拉销速度监控单元2063、回程速度监控单元2064、节拍记录单元2065和拉削负载记录单元2066。
27.本发明的工作原理:可以对操作模块进行详细化,可以通过控制模块201启动手动操作模块202,此时通过执行拉削,回程操纵油缸6伸缩,以点动形式展现,按下拉削不松开执行拉削,松开立后即停止;还可以通过半自动操作模块203,这样可以通过执行拉削,回程操纵油缸6伸缩,以步进形式展现,按下拉销,油缸6执行完工件拉销后撞击限位开关后停止;或者通过自动操作模块204,这样可以通过执行拉削,回程操纵主油缸6伸缩,以自动形式展现,按下拉销,主油缸6执行完工件拉销后撞击限位开关后自动回程,实现拉削循环运动,直至按下停止键停止,然后通过可视化监控模块206对设备的操作过程进行可视化,从而实现实时过程监控,这样通过油压监控单元2061、拉削力监控单元2062、拉销速度监控单元2063、回程速度监控单元2064、节拍记录单元2065和拉削负载记录单元2066对油压、拉削力、拉销速度、回程速度、节拍记录以及拉削负载进行监控,这样使工件实际负载力,刀具实际运行速度,调试合适的安全拉力保证机床,工件,刀具的科学结合,避免由于过载产生不良后果,可以使控制系统的操作实现多样化,对于人工干预的操作也可以适应,从而提高了运行效果,而且可以生产过程中对设备状态进行监控,避免发生设备损坏,提高了监控效果。
28.实施例二
29.参见图1-2,夹持组件3包括第一滑槽301、第一导向杆302、移动块303、第一滑块
304、第一导向孔305、第一弹簧306、气缸307、夹持板308、第二滑槽309、第二导向杆3010、夹持块3011、第二滑块3012、第二导向孔3013和第二弹簧3014,拉床主体1的顶端外壁上对称安装有移动块303,移动块303的底端外壁上焊接固定有第一滑块304,拉床主体1的顶端内壁上对应第一滑块304对称开设有第一滑槽301,第一滑槽301之间的内壁上固定连接有第一导向杆302,第一滑块304的一侧内壁上对应第一导向杆302开设有第一导向孔305,第一滑块304的一侧外壁上焊接固定有第一弹簧306,移动块303的一侧内壁上镶嵌安装有气缸307,拉床主体1的顶端外壁上对称安装有夹持板308,且气缸307的伸缩杆一端固接于夹持板308的外壁上,夹持板308的一侧外壁上对称安装有夹持块3011,夹持块3011的一侧外壁上焊接固定有第二滑块3012,夹持板308的一侧内壁上对应第二滑块3012开设有第二滑槽309,第二滑槽309之间的内壁上焊接固定有第二导向杆3010,第二滑块3012的一侧内壁上对应第二导向杆3010开设有第二导向孔3013,第二滑块3012之间的外壁上焊接固定有第二弹簧3014;第一弹簧306的一侧内部套接于第一导向杆302的外壁上,第二弹簧3014的一侧内部套接于第二导向杆3010的外壁上,当松开夹持块3011时,然后在第二弹簧3014的作用下,使夹持块3011上的第二滑块3012沿着第二滑槽309进行复位,而且还可以取下拉削后的材料,此时在第一弹簧306作用下,使移动块303进行复位。
30.首先将材料放置到拉床主体1上,此时拉动夹持块3011上的第二滑块3012沿着第二滑槽309内的第二导向杆3010进行移动,此时启动气缸307使夹持板308对材料进行夹持,此时松开夹持块3011,然后在第二弹簧3014的作用下,使夹持块3011上的第二滑块3012沿着第二滑槽309进行复位,从而对材料进行二次夹持,当启动油缸6进行伸缩,当行程机构7带动材料进行移动拉削,这样使移动块303上第一滑块304沿着第一滑槽301上的第一导向杆302进行移动,当回程时,取下拉削后的材料,此时在第一弹簧306作用下,使移动块303进行复位,可以对材料进行夹持,避免在拉削时左右晃动,提高了夹持效果。
31.实施例三
32.参见图4-5,升降转运组件5包括收纳槽501、升降槽502、电机503、螺纹杆504、升降板505、滑板506、螺纹孔507和万向轮508,底座4的底端内壁上对称开设有收纳槽501,收纳槽501的一侧内壁上安装有升降板505,升降板505的两侧外壁上均焊接固定有滑板506,收纳槽501的两侧内壁上对应滑板506均开设有升降槽502,升降槽502的顶端内壁上镶嵌安装有电机503,升降槽502的底端内壁上转动连接有螺纹杆504,且电机503的输出轴一端固接于螺纹杆504的顶端外壁上,滑板506的一侧内壁上对应螺纹杆504开设有螺纹孔507,升降板505的底端外壁上对称安装有万向轮508;电机503为一种伺服电机,使螺纹杆504进行正反转动,然后通过螺纹孔507的作用下,使升降板505上的滑板506沿着收纳槽501内的升降槽502进行下降或者上升。
33.当需要拉床主体1进行转运时,启动电机503使螺纹杆504进行转动,然后通过螺纹孔507的作用下,使升降板505上的滑板506沿着收纳槽501内的升降槽502进行下降,从而使万向轮508与地面进行接触,并且使底座4与地面进行分离,然后人工推动拉床主体1时,通过万向轮508带动拉床主体1进行移动,可以将设备进行移动,无需人工进行搬运,提高了搬运效率,且降低了人工负担。
34.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其
发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。