1.本实用新型涉及无人机技术领域,尤其涉及一种无人巡田系统。
背景技术:
2.在农业生产的田间管理中,需要及时巡田获取作物的出苗率、缺苗区域、长势、是否具有病虫害等情况。目前为完成巡田,需要人走到田间观察,收集田间实时情况。然后人工根据经验做出分析和判断,得出作物的出苗率、缺苗区域、是否有病虫害等具体情况。依靠人力获取农田信息以及对信息进行分析判断,有非常大的局限性。因为人工操作会在时间和空间上造成遗漏,不能获取全面有效的信息,同时也需要很大的人力成本投入。此外,会因为人的经验不足造成判断失误,引起后期管理作业偏离正确方向。
3.近年来,利用无人机来进行田间作业管理也逐渐兴起。无人机取代人工观测农作物,弥补了时间和空间的不足,也一定程度避免的判断失误。但目前无人机巡田方案大多需要人工遥控无人机进行检测操作,需要投入大量人力资源,无法实现系统的全自动化操作,并且由于无人机续航时间的限制,其工作范围十分有限。
技术实现要素:
4.为了解决上述技术问题,本实用新型实施例提供了一种无人巡田系统,实现巡田任务全自动化操作,拓展巡田工作范围。
5.第一方面,本实用新型实施例提供了一种无人巡田系统,包括:无人机、巡田负载、停靠站点、供电设备;
6.所述无人机与所述停靠站点通信连接;
7.所述无人机用于搭载所述巡田负载,并用于执行巡田任务,通过所述巡田负载获取所述巡田任务对应的农田巡视记录数据;
8.所述供电设备设置于所述停靠站点,用于在所述无人机停驻在所述停靠站点时,对所述无人机充电。
9.可选的,所述无人巡田系统还包括气象站;
10.所述气象站用于分别与所述无人机、所述停靠站点通信连接;
11.所述无人机或所述停靠站点用于从所述气象站接收气象数据,在所述气象数据满足所述巡田任务的执行条件时,才执行所述巡田任务;
12.所述供电设备,还用于对所述气象站供电。
13.可选的,所述无人巡田系统还包括:
14.云控终端,用于分别与所述无人机和/或所述气象站通信连接,向所述无人机发送所述巡田任务,从所述无人机接收所述农田巡视记录数据,和/或从所述停靠站点获取停靠站点位置信息。
15.可选的,所述无人巡田系统还包括:气象站,
16.所述云控终端,还用于所述气象站通信连接,从所述气象站接收气象数据,向所述
无人机发送所述气象数据。
17.可选的,所述停靠站点配置有多种类型的巡田负载,用于为所述无人机装载或更换所述巡田负载。
18.可选的,所述无人机包括负载接口,所述负载接口,用于插接所述巡田负载。
19.可选的,所述巡田负载包括:雷达设备和/或拍摄设备。
20.可选的,所述雷达设备包括激光雷达;
21.所述拍摄设备包括以下至少一种:红外相机、多光谱相机和rgb相机。
22.可选的,所述无人机还用于在电量低于预设阈值时,触发返航指令,返航至所述停靠站点,向所述停靠站点发送充电请求;
23.所述停靠站点还用于接收所述充电请求,根据所述充电请求,控制所述供电设备的供电接口与所述无人机的充电接口对接,启动对所述无人机充电,获取所述无人机的充电过程参数。
24.可选的,所述停靠站点还与所述云控终端通信连接,用于向所述云控终端发送所述充电过程参数。
25.可选的,所述供电设备包括以下至少一种:燃油发电设备、太阳能发电设备及市电供电设备。
26.上述本技术提供的无人巡田系统包括:无人机、巡田负载、停靠站点、供电设备;无人机与停靠站点通信连接;搭载巡田负载,实现执行巡田任务,通过巡田负载获取巡田任务对应的农田巡视记录数据;供电设备设置于停靠站点,用于在无人机停驻在停靠站点时,对无人机充电。这样,以无人机代替人对田间进行巡视,得到农田巡视记录数据,将停靠站点部署在田间,在需要充电时停驻在停靠站点,自动对无人机自动充电,整个过程实现无人机巡田及自动充电,增大无人机工作范围,同时减少农田巡视中的人工投入。
附图说明
27.为了更清楚地说明本实用新型的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本实用新型的某些实施例,因此不应被看作是对本实用新型保护范围的限定。在各个附图中,类似的构成部分采用类似的编号。
28.图1示出了本技术提供的无人巡田系统的一结构示例图;
29.图2示出了本技术提供的无人巡田系统的另一结构示例图。
具体实施方式
30.下面将结合本实用新型实施例中附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
31.通常在此处附图中描述和示出的本实用新型实施例的组件可以以各种不同的配置来布置和设计。因此,以下对在附图中提供的本实用新型的实施例的详细描述并非旨在限制要求保护的本实用新型的范围,而是仅仅表示本实用新型的选定实施例。基于本实用新型的实施例,本领域技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
32.在下文中,可在本实用新型的各种实施例中使用的术语“包括”、“具有”及其同源词仅意在表示特定特征、数字、步骤、操作、元件、组件或前述项的组合,并且不应被理解为首先排除一个或更多个其它特征、数字、步骤、操作、元件、组件或前述项的组合的存在或增加一个或更多个特征、数字、步骤、操作、元件、组件或前述项的组合的可能性。
33.此外,术语“第一”、“第二”、“第三”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
34.除非另有限定,否则在这里使用的所有术语(包括技术术语和科学术语)具有与本实用新型的各种实施例所属领域普通技术人员通常理解的含义相同的含义。所述术语(诸如在一般使用的词典中限定的术语)将被解释为具有与在相关技术领域中的语境含义相同的含义并且将不被解释为具有理想化的含义或过于正式的含义,除非在本实用新型的各种实施例中被清楚地限定。
35.实施例1
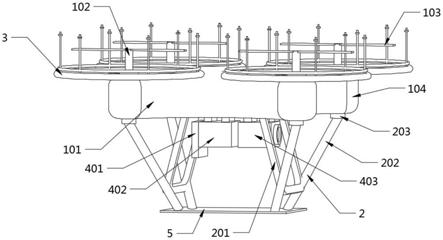
36.请参阅图1,本技术实施例的无人巡田系统100包括:无人机101、巡田负载102、停靠站点103及供电设备104,所述无人机101与所述停靠站点103通信连接;所述无人机101用于搭载所述巡田负载102,并用于执行巡田任务,通过所述巡田负载102获取所述巡田任务对应的农田巡视记录数据;所述供电设备104设置于所述停靠站点103,用于在所述无人机101停驻在所述停靠站点103时,对所述无人机101充电。
37.在本实施例中,无人机101接受到巡田任务后,根据巡田任务请求挂载指定的巡田负载,停靠站点103自动为无人机101挂载指定的巡田负载。停靠站点103根据周围环境气象数据,比对巡田任务设定的执行条件,确定是否放飞无人机。巡田任务长时间不执行,巡田任务包括有任务生存时长,超过该任务生存时长,巡田任务会被挂起或放弃,进入逾期任务,若满足执行条件,会放飞无人机,无人机即根据巡田任务要求及航线信息,进入巡田任务执行状态,执行巡田任务过程记录农田巡视记录数据及无人机飞行状态信息。
38.在本实施例中,无人机101搭载巡田负载102在预置航线的约束下,飞行在空中对农田进行巡视,替代人工真实进入田间巡检,减少了人员的投入。此外,无人机101巡视可以不受地形的限制,不会遗漏巡田区域。因为巡田任务可以自动化编排管理,可以准时按照编排完成巡田任务。无人机巡田还可以在不同的高度对田间信息进行巡检,无人机可以获取更为全面、准确的农田巡视记录数据。
39.在本实施例中,巡田负载102即挂载在无人机上的各种巡田传感器,这些传感器根据不同的特性完成不同的巡田任务,比如数码相机,红外相机、多光谱相机、激光雷达等。
40.在本实施例中,停靠站点103部署在田间,可以根据需求,在田间按照预设规则在一片田间设置多个停靠站点。例如,按照间隔1千米安装一个停靠站点的规则设置停靠站点。把无人机部署在田间,不需要人工投入,无人机自动返回停靠站点,自动完成无人机的巡田任务加载、充电、放飞、回收、以及不同巡田负载的装载及更换等操作。
41.本实施例的无人巡田系统,以无人机代替人对田间进行巡视,得到农田巡视记录数据,将停靠站点部署在田间,在需要充电时停驻在停靠站点,自动对无人机自动充电,整个过程实现无人机巡田及自动充电,增大无人机工作范围,同时减少农田巡视中的人工投入。
42.本实施例中,无人机与巡田负载之间挂接,使用有线连接进行通信;无人机、停靠
站之间使用无线通信进行数据交互。
43.可选的,请参阅图2,无人巡田系统100还包括气象站105,所述气象站105用于分别与所述无人机101、所述停靠站点103通信连接;所述无人机101或停靠站点103用于从所述气象站105接收气象数据,在所述气象数据满足所述巡田任务的执行条件时,才执行所述巡田任务。
44.在本实施例中,所述供电设备104,还用于对所述气象站105供电。无人机101与气象站105进行无线通信连接。在农业生产及无人机执行任务都需要知晓当前的气象数据,在气象数据满足无人机飞行气象条件时,无人机才可以安全完成巡田工作。农田巡视记录数据也需要标记相应的气象数据,才能发挥更好的参考价值。
45.在本实施例中,无人机101或停靠站点103根据气象数据进行辅助数据处理,例如,无人机101判断风向、风等级大小是否在安全飞行风向、分级范围之内。停靠站点103根据气象数据确定是否允许无人机飞行。
46.可选的,请再次参阅图2,无人巡田系统100还包括:云控终端106,用于分别与所述无人机101和/或所述停靠站点103站点通信连接,向所述无人机发送所述巡田任务,从所述无人机接收所述农田巡视记录数据,和/或从所述停靠站点103获取停靠站点位置信息。
47.在本实施例中,无人机101与云控终端106进行无线通信连接。云控终端106是整个无人巡田系统100控制中心,云控终端106为用户提供交互接口,管理无人巡田系统100中的无人机、巡田负载、停靠站、气象站等设备,为无人巡田系统100创建巡田任务,分配执行巡田任务的无人机、对无人机的巡田任务进行编排。云控终端106可以有智能引擎,通过智能引擎对农田巡视记录数据进行分析,并生成农田信息报告发送农田所有者的终端设备,为农田所有者提供农田管理作业指导,农田信息报告包括巡视区域的出苗率、缺苗情况、病虫害情况等信息报告。
48.在本实施例中,云控终端106可以从所述停靠站点103获取停靠站点位置信息,向无人机101发送停靠站点位置信息,使得无人机101可以降落到停靠站点103上,自动完成充电、装载或更换负载等操作。
49.可选的,请再次参阅图2,无人巡田系统100还包括:气象站105;
50.所述云控终端106,还用于所述气象站105通信连接,从所述气象站105接收所述气象数据,向所述无人机101发送所述气象信息。
51.在本实施例中,所述云控终端106还可以根据气象信息对无人机101进行调度。例如,在气象信息符合任务执行条件时,所述云控终端106控制无人机101执行巡田任务,在气象信息不符合任务执行条件时,所述云控终端106控制无人机101降落或停驻在停靠站点103,不执行巡田任务。
52.所述云控终端106,还用于对无人机、停靠站点、气象站及巡田负载的数量进行配置;根据已配置的各无人机、各停靠站点、各巡田负载的设备信息,设置巡田任务,巡田任务包括指定执行任务的无人机、巡田负载种类、巡视区域、任务执行条件、飞行航线信息及任务执行周期。在云控终端106的设备管理中,会显示无人巡田系统的设备列表、设备详情信息、设备异常信息、地图沙盘、设备添加删除等管理功能;建立完整的巡田系统后,既可以在云控终端106的巡田任务管理中可以创建巡田任务、编排巡田任务、分配巡田任务、查询巡田任务的完成结果。
53.在本实施例中,云控终端106获取气象数据并显示给云端用户,以便云端用户能实时查看气象数据。
54.可选的,所述停靠站点103配置有多种类型的巡田负载,用于为所述无人机101装载或更换所述巡田负载。
55.在本实施例中,巡田负载包括:雷达设备和/或拍摄设备。
56.请再次参阅图2,停靠站点103配置雷达设备1021及拍摄设备1022。在其他实施方式中,停靠站点103可以仅仅配置雷达设备1021或者仅仅配置拍摄设备1022。
57.在本实施例中,雷达设备包括激光雷达,拍摄设备包括以下至少一种:红外相机、多光谱相机和rgb相机。
58.在本实施例中,可以根据需求,将激光雷达、红外相机、多光谱相机和rgb相机配置在停靠站点103。激光雷达可以用于探测目标物体的位置,红外相机可以用于在光线亮度不足时拍摄图像,多光谱相机可以用于检测农作物的状况,rgb相机可以用于拍摄彩色图片。上述对激光雷达、红外相机、多光谱相机和rgb相机等巡田设备的作用进行举例说明,巡田设备还可以相应有其他作用,在此不做限制。无人机停靠在停靠站点后,根据巡田任务需求,选择一类或多类巡田设备进行挂接,在此不做限制。
59.可选的,所述无人机101包括负载接口,所述负载接口,用于插接所述巡田负载102。
60.在本实施例中,无人机101的负载接口与巡田负载102进行插接,可以实现机械连接及电气连接。
61.可选的,所述无人机101还用于在电量低于预设阈值时,触发返航指令,返航至所述停靠站点103,向所述停靠站点103发送充电请求;所述停靠站点103还用于接收所述充电请求,根据所述充电请求,控制所述供电设备104的供电接口与所述无人机101的充电接口对接,启动对所述无人机101充电,获取所述无人机101的充电过程参数。
62.在本实施例中,无人机101执行巡田任务过程中或巡田任务结束,电量低于预设阈值,会触发返航指令,无人机101自动返航至停靠站点103,待无人机101返航停靠在停靠站点103后,停靠站点103会根据无人机101的充电请求,自动对接无人机的充电接口,对接完成后进行握手信号确认,待停靠站点103确认正确对接无人机101的充电接口,停靠站点103会启动对无人机101充电,并实时监控充电过程参数,充电过程参数可以包括充电电流、充电电压及无人机电池电量等,并把这些参数值实时上传至云控终端106。整个过程在停靠站内自动完成,无需人员参与;充电完成后,无人机即会重新完成上一未执行完毕的巡田任务,或等待下一次执行巡田任务。
63.可选的,所述停靠站点103还与所述云控终端106通信连接,用于向所述云控终端106发送所述充电过程参数。
64.在本实施例中,云控终端106的智能引擎对充电过程参数进行分析处理,自动生成充电及电池健康报告。充电及电池健康报显示充电过程中是否存在电压过高,电流过大等,以判断停靠站点103的充电功能是否正常运行,及无人机101的电池是否处于健康运行状态。
65.可选的,所述供电设备104包括以下至少一种:燃油发电设备1041、太阳能发电设备1042及市电供电设备1043。
66.在本实施例中,供电设备104可以为停靠站点103及气象站105提供电源。供电设备104市电供电设备,也可以是太阳能发电设备,还可以是燃油发电设备,根据不同的应用场景配置不同种类的供电设备。
67.本技术提供的无人巡田系统包括:无人机、巡田负载、停靠站点、供电设备;无人机与停靠站点通信连接;无人机用于搭载巡田负载,并用于执行巡田任务,通过巡田负载获取巡田任务对应的农田巡视记录数据;供电设备设置于停靠站点,用于在无人机停驻在停靠站点时,对无人机充电。这样,以无人机代替人对田间进行巡视,得到农田巡视记录数据,将停靠站点部署在田间,在需要充电时停驻在停靠站点,自动对无人机自动充电,整个过程实现无人机巡田及自动充电,增大无人机工作范围,同时减少农田巡视中的人工投入。
68.以上所述,仅为本实用新型的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。