1.本实用新型涉及无人机技术领域,尤其涉及一种能自主定位降落的无人机。
背景技术:
2.无人机是一种利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,在如今的生活中,无人机也已经家喻户晓,为现有的无人机在飞行时,螺旋桨是暴露在外部的,在飞行时杂物容易掉落到螺旋桨上,从而使得螺旋桨不能够转动,使得无人机掉落,从而降低了无人机的使用寿命,并且现有的无人机在降落时容易滑过,不便于使用,因此,为了解决此类问题,我们提出了一种能自主定位降落的无人机。
技术实现要素:
3.本实用新型提出的一种能自主定位降落的无人机,解决了现有的无人机在飞行时容易遇到杂物使得螺旋桨不能够转动,且在降落时容易滑过,不便于使用的问题。
4.为了实现上述目的,本实用新型采用了如下技术方案:
5.一种能自主定位降落的无人机,包括外壳机构,还包括限位机构,且所述限位机构位于外壳机构的底端,所述限位机构以外壳机构的中轴线呈对称分布,且所述外壳机构的顶端设置有防护机构,所述防护机构为固定式连接结构,所述外壳机构的底端设置有工作机构,且所述限位机构的底端设置有无线充电板。
6.优选的,所述外壳机构包括机体、旋转轴、螺旋桨以及连接轴,所述机体的一侧设置有连接轴,且所述连接轴以机体的中轴线呈对称分布,所述连接轴的顶端设置有旋转轴,且所述旋转轴的外壁设置有螺旋桨,所述螺旋桨以旋转轴的中轴线呈对称分布。
7.优选的,所述工作机构包括无线充电模组、动力电池以及云台相机,新型无线充电模组位于机体的底端,且所述无线充电模组的一侧设置有动力电池,所述动力电池的一侧设置有云台相机,且所述云台相机与机体相连接。
8.优选的,所述限位机构包括降落杆、防超限杆以及固定轴,所述固定轴与连接轴相连接,所述降落杆与机体相连接,且所述降落杆以机体的中轴线呈对称分布,所述固定轴的底端设置有防超限杆。
9.优选的,所述防护机构包括固定环、连接板、底环、支撑杆、固定块以及防护网,所述固定环与连接轴相连接,且所述固定环的顶端设置有底环,所述底环的内壁设置有支撑杆,且所述支撑杆以底环的圆周方向均匀分布,所述支撑杆的外壁设置有固定块,且两个所述固定块之间设置有防护网。
10.优选的,所述固定环的内壁设置有连接板,且所述连接板以固定环的圆周方向均匀分布,所述连接板与机体相连接。
11.本实用新型的有益效果为:
12.1、本实用新型通过设置了降落杆、防超限以及固定轴,使用时,当无人机收到可返航降落信号后,无人机自主返航到无人机机库上方,通过机库降落平台处设立的二维码进
行定位,同时在降落过程中无人机防超限杆会在机库的防超杆处进行落地限位,更有效的解决出现的超出平台降落的可能。
13.2、本实用新型通过设置了固定环、连接板、底环、支撑杆、固定块以及防护网,使用时,首先将防护网安装在固定块上,通过底环以及支撑杆对防护网进行支撑,且底环与固定环相连接,固定环通过连接板与机体连接,从而保证了防护网的稳定性,使得无人机在飞行时,能够对螺旋桨进行防护,避免了螺旋桨上缠绕上杂物,导致螺旋桨不能转动的情况。
14.综上所述,该装置不仅有效的解决出现的超出平台降落的可能,同时能够对螺旋桨进行防护,避免了螺旋桨上缠绕上杂物,导致螺旋桨不能转动的情况。
附图说明
15.图1为本实用新型的结构示意图。
16.图2为本实用新型的结构俯视图。
17.图3为本实用新型的防护机构内部结构示意图。
18.图4为本实用新型的防护机构结构示意图。
19.图中标号:1、外壳机构;101、机体;102、旋转轴;103、螺旋桨;104、连接轴;2、限位机构;201、降落杆;202、防超限杆;203、固定轴;3、防护机构;301、固定环;302、连接板;303、底环;304、支撑杆;305、固定块;306、防护网;4、工作机构;401、无线充电模组;402、动力电池;403、云台相机;5、无线充电板。
具体实施方式
20.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
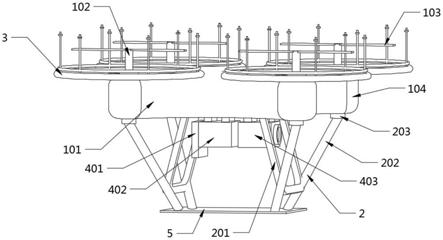
21.参照图1-图4,一种能自主定位降落的无人机,包括外壳机构1,还包括限位机构2,且所述限位机构2位于外壳机构1的底端,所述限位机构2以外壳机构1的中轴线呈对称分布,且所述外壳机构1的顶端设置有防护机构3,所述防护机构3为固定式连接结构,所述外壳机构1的底端设置有工作机构4,且所述限位机构2的底端设置有无线充电板5,所述外壳机构1包括机体101、旋转轴102、螺旋桨103以及连接轴104,所述机体101的一侧设置有连接轴104,且所述连接轴104以机体101的中轴线呈对称分布,所述连接轴104的顶端设置有旋转轴102,且所述旋转轴102的外壁设置有螺旋桨103,所述螺旋桨103以旋转轴102的中轴线呈对称分布,所述工作机构4包括无线充电模组401、动力电池402以及云台相机403,新型无线充电模组401位于机体101的底端,且所述无线充电模组401的一侧设置有动力电池402,所述动力电池402的一侧设置有云台相机403,且所述云台相机403与机体101相连接。
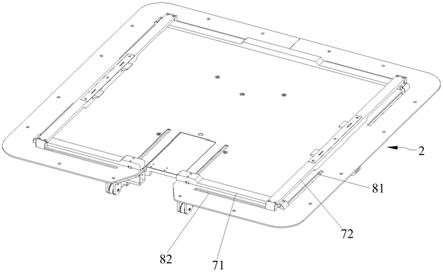
22.如图1和图2所示,所述限位机构2包括降落杆201、防超限杆202以及固定轴203,所述固定轴203与连接轴104相连接,所述降落杆201与机体101相连接,且所述降落杆201以机体101的中轴线呈对称分布,所述固定轴203的底端设置有防超限杆202,使得无人机在降落时更加的安全,增加了该装置的稳定性。
23.如图3和图4所示,所述防护机构3包括固定环301、连接板302、底环303、支撑杆304、固定块305以及防护网306,所述固定环301与连接轴104相连接,且所述固定环301的顶
端设置有底环303,所述底环303的内壁设置有支撑杆304,且所述支撑杆304以底环303的圆周方向均匀分布,所述支撑杆304的外壁设置有固定块305,且两个所述固定块305之间设置有防护网306,所述固定环301的内壁设置有连接板302,且所述连接板302以固定环301的圆周方向均匀分布,所述连接板302与机体101相连接,用于防护螺旋桨103,增加了螺旋桨103的安全性。
24.工作原理:该装置在使用时,首先将防护网306安装在固定块上305,通过底环303以及支撑杆304对防护网306进行支撑,且底环303与固定环301相连接,固定环301通过连接板302与机体101连接,从而保证了防护网306的稳定性,使得无人机在飞行时,能够对螺旋桨103进行防护,之后通过旋转轴102转动,使得螺旋桨103转动,从而使得无人机启动,且通过动力电池402提供电力,且通过云台相机403可在飞行时进行拍摄,当无人机收到可返航降落信号后,无人机自主返航到无人机机库上方,通过机库降落平台处设立的二维码进行定位,同时在降落过程中无人机防超限杆202会在机库的防超杆处进行落地限位,更有效的解决出现的超出平台降落的可能,当需要对无人机进行充电时,则通过无线充电板5进行充电即可。
25.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。