agv车的对接装置及agv车
技术领域
1.本技术属于物流运输技术领域,具体涉及一种agv车的对接装置及agv车。
背景技术:
2.agv(automated guided vehicle,自动导引运输车)是指装备有电磁或光学等自动导引导航装置,能够沿规定的导航路径行驶,并具有移载功能的运输车。
3.agv车广泛用于货物运输,相关技术中,agv车借助载具实现货物的运输,货物放置在载具上,agv车通过搬运载具实现货物的运输,但是,agv车与载具对接时容易出现定位偏差,难以精准对接,影响货物的正常运输和货物的运输效率。
技术实现要素:
4.本技术实施例的目的是提供一种agv车的对接装置及agv车,能够解决相关技术中,agv车与载具难以精准对接的问题。
5.为了解决上述技术问题,本技术是这样实现的:
6.本技术实施例提供了一种agv车的对接装置,包括举升台和定位件,其中:
7.所述举升台设有第一通孔,所述定位件可移动地设于所述举升台,且可在第一位置与第二位置之间切换;
8.在所述定位件处于所述第一位置的情况下,所述定位件的至少部分通过所述第一通孔伸出至所述举升台的台面之上;
9.在所述定位件处于所述第二位置的情况下,所述定位件通过所述第一通孔回缩至所述台面的下方。
10.本技术实施例还提供了一种agv车,包括上述的agv车的对接装置。
11.在本技术实施例中,在agv车需要与载具对接的情况下,定位件切换至第一位置,定位件的至少部分通过第一通孔伸出至举升台的台面之上,定位件的伸出部分可与载具的定位孔定位配合,实现agv车与载具的精准定位。由此可见,本技术所公开的对接装置能够解决相关技术中agv车与载具难以精准对接的问题。
附图说明
12.图1为本技术实施例公开的定位件处于第一位置时的对接装置的结构示意图;
13.图2为本技术实施例公开的定位件处于第二位置时的对接装置的结构示意图;
14.图3为本技术实施例公开的定位件的结构示意图。
15.附图标记说明:
16.100-举升台、110-举升本体、120-防滑层、
17.200-定位件、210-定位本体、220-导向部、
18.300-承压件、310-驱动端、
19.400-杠杆组件、410-杠杆主体、411-弧形凹面、420-杠杆支座、430-连杆、
20.500-弹性件、
21.610-第一滑动轴承、620-第二滑动轴承、
22.700-载具、710-定位孔、
23.810-弹性调节件、820-连接销轴。
具体实施方式
24.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
25.本技术的说明书和权利要求书中的术语“第一”、“第二”等是用于区别类似的对象,而不用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便本技术的实施例能够以除了在这里图示或描述的那些以外的顺序实施,且“第一”、“第二”等所区分的对象通常为一类,并不限定对象的个数,例如第一对象可以是一个,也可以是多个。此外,说明书以及权利要求中“和/或”表示所连接对象的至少其中之一,字符“/”,一般表示前后关联对象是一种“或”的关系。
26.下面结合附图,通过具体的实施例及其应用场景对本技术实施例进行详细地说明。
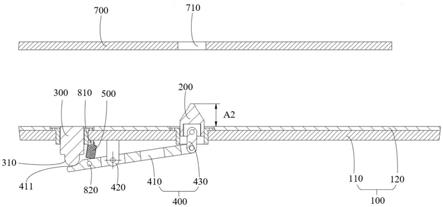
27.如图1至图3所示,本技术公开了一种agv车的对接装置,可用于agv车。所公开的对接装置包括举升台100和定位件200。
28.其中,举升台100设有第一通孔,定位件200可移动地设于举升台100,且可在第一位置与第二位置之间切换。
29.在定位件200处于第一位置的情况下,定位件200的至少部分通过第一通孔伸出至举升台100的台面之上。也就是说,在定位件200处于第一位置的情况下,定位件200凸出于举升台100,定位件200的凸出部分可以伸入载具700的定位孔710内,以实现agv车与载具700的精准对接。
30.在定位件200处于第二位置的情况下,定位件200通过第一通孔回缩至台面的下方。此种情况下,在agv车向载具700的底部移动的过程中,定位件200切换至第二位置,能够防止定位件200与载具700发生接触或碰撞,防止定位件200受损。
31.在本技术公开的实施例中,在agv车需要与载具700对接的情况下,定位件200切换至第一位置,定位件200的至少部分通过第一通孔伸出至举升台100的台面之上,定位件200的伸出部分可与载具700的定位孔710定位配合,实现agv车与载具700的精准定位。由此可见,本技术所公开的对接装置能够解决相关技术中agv车与载具700难以精准对接的问题。
32.此外,为了控制agv车的高度以及为了保证agv车的举升效率,agv车的举升行程一般比较小。但是,agv车进入载具700底部后,需要保证定位件200与载具700之间具有一定的安全距离,且载具700被举起后,还需要保证载具700的底部离地面之间具有一定距离。此种情况下,如果将定位件200固定设于举升台100,则定位件200的长度只能设计的比较短,则定位件200能够伸入定位孔710内的有效长度也较短,若agv车在运输过程中发生碰撞,很有可能造成载具700与举升台100发生相对移动,导致举升台100摩擦受损,影响货物的正常运
输。
33.而在本技术公开的实施例中,在定位件200处于第二位置的情况下,定位件200回缩至台面之下,能够保证定位件200与载具700之间具有足够的安全距离,定位件200可移动地设于举升台100,可以增长定位件200的长度,进而增长定位件200能够从举升台100伸出并伸入定位孔710内的有效长度,保证载具700被举起后,载具700的底部与地面之间的安全距离,并使定位件200对载具700和举升台100起到良好的限位作用,防止运输过程中载具700与举升台100相对移动。
34.在进一步的技术方案中,定位件200包括定位本体210和导向部220,导向部220为锥形结构,锥形结构的第一端与定位本体210相连,锥形结构的第二端为尖端。
35.在定位件200处于第一位置的情况下,定位本体210的至少部分和导向部220均通过第一通孔,而伸出至举升台100的台面之上,在定位件200处于第二位置的情况下,定位本体210和导向部220均回缩至台面的下方,且导向部220的第二端邻近台面。也就是说,在agv车与载具700对接的过程中,导向部220首先从台面伸出并伸入定位孔710内,随着定位件200的逐渐伸出,定位本体210的至少部分伸入定位孔710内。
36.此种情况下,导向部220在对接过程中可以起到导向和微调agv车的位置的作用,使得定位件200能够更顺利地伸入定位孔710内。
37.在定位件200伸入定位孔710内的情况下,定位件200的外表面与定位孔710的孔壁贴合,以实现定位件200与定位孔710的定位配合,防止定位件200与定位孔710之间具有间隙,进而防止agv车带动载具700移动的过程中载具700发生晃动,提升运输可靠性。定位本体210的形状与定位孔710的形状相适配,可选的,定位本体210可以设计为圆柱形结构,也可以设计为长方体结构,当然还可以设为其他形状,本技术对此不作限制。
38.如上文所述,相对于将定位件200固定设于举升台100上,定位件200可移动地设于举升台100可以增大定位件200的有效长度,相应的,也可以增大导向部220的长度,减小锥形结构的锥角θ,较小的锥角θ和较长的导向部220能够提升agv车与载具700对接的顺畅性。
39.实现定位件200在第一位置和第二位置之间切换的具有结构有多种,例如,可以通过伸缩杆、气缸、滚珠丝杠等结构来实现定位件200的位置切换,当然,也可以采用其他结构实现定位件200的位置切换,本技术对此不作限制。
40.在一种可选的实施例中,对接装置可以包括承压件300和杠杆组件400,杠杆组件400可转动地连接于举升台100,举升台100设有第二通孔,承压件300与第二通孔可移动配合。
41.承压件300包括承压端和与之相背的驱动端310,驱动端310与杠杆组件400的第一端配合,杠杆组件400的第二端与定位件200配合,定位件200可通过杠杆组件400随承压件300的移动在第一位置与第二位置之间切换。
42.在定位件200处于第一位置的情况下,承压端的端面与台面平齐或回缩至台面之下;在定位件200处于第二位置的情况下,承压端移动至台面之上。
43.在agv车需要与载具700对接时,agv车移动至载具700的下方,并使定位件200与定位孔710大致对准,举升台100上升,在举升台100上升的过程中,承压件300的承压端首先与载具700接触,并在与载具700的相互作用下向台面之下移动,承压件300的驱动端310驱动杠杆组件400的第一端向台面之下的方向移动,杠杆组件400的第二端驱动定位件200向台
面之上移动,以使定位件200切换至第一位置。
44.在载具700运输完成,且载具700从agv车上取下后,承压件300的承压端移动至台面之上,杠杆组件400的第一端随承压件300向靠近台面之上的方向移动,使得杠杆组件400的第二端和定位件200向台面之下的方向移动,以使定位件200切换至第二位置。
45.在本技术实施例中,借助举升台100上升过程中与载具700之间的相互作用力驱动承压件300相对于举升台100移动,进而使承压件300通过杠杆组件400驱动定位件200在第一位置和第二位置之间切换,简单便捷,不需要专门的控制器件来控制承压件300的移动,提升了对接装置的可靠性,控制了对接装置的成本。
46.杠杆组件400包括杠杆主体410和连杆430,举升台100设有杠杆支座420,杠杆主体410转动地设于杠杆支座420上,杠杆主体410的第一端与承压件300配合,杠杆主体410的第二端与连杆430的一端转动相连,连杆430的另一端与定位件200转动相连,杠杆支座420位于杠杆主体410的第一端与杠杆主体410的第二端之间。可选的,杠杆主体410可以通过销轴等结构可转动地设于杠杆支座420,杠杆主体410的第二端与连杆430、连杆430与定位件200之间可以通过销轴实现可转动连接。
47.在定位件200处于第一位置的情况下,连杆430的至少部分可以伸入第一通孔内,或者通过第一通孔伸出至台面之上。此种情况下,能够增长定位件200从举升台100伸出的有效长度,进而提升agv车与载具700的对接稳定性。
48.在进一步的技术方案中,杠杆主体410的第一端与杠杆支座420之间的距离为第一距离,杠杆主体410的第二端与杠杆支座420之间的距离为第二距离,第一距离小于第二距离。此种情况下,在杠杆主体410的转动过程中,在举升台100的举升方向,杠杆主体410的第一端的移动距离小于杠杆主体410的第二端的移动距离,也就是说,承压件300的移动距离小于定位件200的移动距离。
49.例如,杠杆主体410的第一端至杠杆支座420的距离为l1,杠杆主体410的第二端至杠杆支座420的距离为l2,l2=nl1,在杠杆主体410转动的过程中,第一端和承压件300移动的距离为a1,第二端和定位件200移动的距离为a2,a2=na1,n大于零。
50.在此方案中,定位件200伸出至台面之上的长度大于承压件300伸出至台面之上的长度,能够保证在agv车向载具700移动的过程中,承压件300与载具700之间具有一定的安全距离,防止承压件300由于伸出长度过长而与载具700发生碰撞或摩擦,也能够保证定位件200伸出足够的长度与定位孔710定位配合。
51.实现杠杆主体410的第一端与承压件300配合的结构有多种,例如,承压件300可以通过中间连杆与杠杆主体410连接,中间连杆的一端与承压件300的驱动端310转动相连,中间连杆的另一端与杠杆主体410的第一端转动连接。
52.在本技术公开的实施例中,杠杆主体410的第一端设有弧形凹面411,驱动端310的端面为弧形面或球面,弧形凹面411与驱动端310的端面可随杠杆主体410的转动而相对转动。相对于通过中间连杆实现承压件300与杠杆主体410配合的方式,本技术实施例能够减小对接装置的体积,且此种结构能够使杠杆主体410和承压件300之间的相对转动更加顺滑。
53.上述方案中,通过弧形面或球面与弧形凹面411的配合使得承压件300的自由度更高,为了进一步规范承压件300的移动轨迹,定位件200与第一通孔可滑动配合,且可沿第一
通孔的轴线方向滑动,和/或,承压件300与第二通孔可滑动配合,且可沿第二通孔的轴线方向滑动。第一通孔的轴线方向和第二通孔的轴线方向均与举升台100的举升方向一致。
54.可选的,定位件200可以通过第一滑动轴承610与第一通孔可滑动配合。可选的,承压件300可以通过第二滑动轴承620与第二通孔可滑动配合。
55.此种情况下,承压件300和定位件200的移动方向固定,避免承压件300和定位件200移动过程中由于发生偏斜而导致卡死,进而提升对接装置的可靠性。
56.上述方案中,在承压件300与载具700不接触的情况下,定位件200移动至台面之下,承压件300的承压端移动至台面之上,可选的,定位件200可以通过自身重力移动至台面之下,进而借助杠杆组件400使承压件300的承压端移动至台面之上。
57.或者,在进一步的技术方案中,对接装置还可以包括弹性件500,弹性件500连接在举升台100与杠杆组件400之间,弹性件500用于驱动杠杆组件400通过转动带动承压件300的承压端移动至台面之上。可选的,弹性件500可以为螺旋弹簧,也可以为弹性柱。
58.在举升台100上升的过程中,承压件300与载具700接触,使承压件300向台面之下移动,在此过程中,弹性件500产生弹性形变并积蓄恢复形变的弹性势能,在承压件300与载具700不接触时,弹性件500恢复弹性形变,带动承压件300的承压端移动至台面之上,并通过杠杆组件400使定位件200移动至台面之下。
59.此种情况下,借助弹性件500能够驱动定位件200更快地切换至第二状态。
60.在进一步的技术方案中,对接装置还可以包括弹性调节件810,举升台100设有螺纹孔,弹性调节件810通过螺纹配合可移动地设于螺纹孔中,弹性件500通过弹性调节件810与举升台100相连。此种情况下,通过旋转弹性调节件810可以调节弹性件500的弹力大小,进而可以提高弹性件500驱动的力度和灵敏度。
61.弹性件500与弹性调节件810的连接方法有多种,在一种可选的实施例中,弹性调节件810设有吊环,弹性件500设有第一吊钩,第一吊钩与吊环钩接,以实现弹性件500与弹性调节件810的连接。或者,弹性件500可以通过粘接或焊接等方式与弹性调节件810固定相连。当然,也可以通过其他方式实现弹性件500与弹性调节件810的连接,本文对此不作限制。
62.弹性件500与杠杆组件400的连接方法有多种,在一种可选的实施例中,对接装置还可以包括连接销轴820,连接销轴820设于杠杆组件400,连接销轴820的端部设有安装孔,弹性件500设有第二吊钩,第二吊钩与安装孔钩接,实现弹性件500与杠杆组件400的连接。或者,弹性件500可以通过粘接或焊接等方式与杠杆组件400固定相连。当然,也可以通过其他方式实现弹性件500与杠杆组件400的连接,本文对此不作限制。
63.在进一步的技术方案中,弹性件500的数量可以为两个,以增强对接装置的可靠性。相应的,连接销轴820可以设有两个安装孔,两个安装孔沿连接销轴820的长度方向分别设于连接销轴820的两端,两个弹性件500的两个第二吊钩分别与两个安装孔钩接。
64.在进一步的技术方案中,举升台100包括举升本体110和叠置在举升本体110上的防滑层120,防滑层120背离举升本体110的表面为台面。
65.可选的,防滑层120可以为硅胶垫层。此种情况下,防滑层120能够增强举升台100与载具700之间的摩擦力,防止举升台100和载具700相对移动,增强运输可靠性。
66.基于本技术的上述任一实施例的对接装置,本技术实施例还公开一种agv车,所公
开的agv车包括上述任一实施例所述的对接装置。该agv车产生的有益效果的推导过程与上述对接装置带来的有益效果推导过程大体类似,故本文不再赘述。
67.在进一步的技术方案中,agv车可用于搬运载具700,载具700开设有定位孔710,在定位件200处于第一位置的情况下,定位件200伸至定位孔710中,台面与载具700贴合,定位件200与载具700在垂直于定位孔710的轴线的平面内限位配合。此种情况下,能够防止在搬运载具700的过程中,载具700与agv车相对滑动,防止载具700从agv车上掉落,保证载具700的顺利搬运。
68.上面结合附图对本技术的实施例进行了描述,但是本技术并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本技术的启示下,在不脱离本技术宗旨和权利要求所保护的范围情况下,还可做出很多形式,均属于本技术的保护之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。