1.本发明涉及一种控制单元,该控制单元用于确定指示支撑车辆的地面段的承载能力的值。另外,本发明涉及一种车辆。此外,本发明涉及一种用于确定指示支撑车辆的地面段的承载能力的值的方法。
2.本发明可以应用于重型车辆中,例如卡车、公共汽车和建筑设备。尽管将针对卡车来描述本发明,但本发明不限于这种特定车辆,而是也可用在其它车辆中,例如公共汽车或轿车。
背景技术:
3.当操作车辆(例如卡车)时,可能希望知道该车辆要在其上行驶的地面段的承载能力。为此,道路标志可以指示最大容许轮轴道路压力(axle road pressure)。
4.然而,有许多道路没有轮轴道路压力的道路标志,车辆也可能需要在非传统道路的地面段上行驶。因此,需要获得更多关于地面段的承载能力的信息。
技术实现要素:
5.本发明的一个目的是:以比使用上述道路标志更灵活的方式获得地面段的承载能力的信息。
6.根据本发明的第一形态,该目的通过根据权利要求1的控制单元来实现。
7.因此,本发明的第一形态涉及一种控制单元,该控制单元用于确定指示支撑车辆的地面段的承载能力的值。该控制单元适于:
8.‑
向车辆发出控制信号,从而向车辆施加运动变化;
9.‑
从该车辆接收响应信息,该响应信息指示了车辆对所施加的运动变化的响应。
10.根据本发明的第一形态,该控制单元还适于:
11.‑
基于该响应信息,确定车辆的至少一个车轮的竖直位置变化,并且
12.‑
基于所确定的竖直位置变化和所施加的运动变化,确定指示所述地面段的承载能力的值。
13.因此,根据本发明的第一形态,该控制单元可适于使用位于地面段上的车辆来确定地面段的承载能力。之后,指示承载能力的信息可用于各种目的。仅作为示例,可以将指示承载能力的信息传送到其它车辆,和/或可以将该信息存储在与车辆相关联的存储器中。
14.此外,由于使用该车辆来确定承载能力,可以获得指示地面段的当前承载能力的值。某些地面段在不同的环境条件下可能表现出不同的承载能力,这例如依赖于温度和/或降水,而使用例如道路标志等的传统方法可能难以捕捉到这种依赖性。
15.可选地,所述运动变化包括车辆的速度变化,优选地,所述运动变化包括车辆的减速。车辆的速度变化很容易实现,并且这种速度变化不一定会被车辆的操作者感知为干扰。
16.可选地,所述控制单元适于根据车辆的速度变化来确定施加给车辆的速度变化力
矩的大小和方向。当确定承载能力时,例如当求解运动方程以确定地面段刚度时,所述速度变化力矩可以是相关信息。
17.可选地,通过确定在速度变化之后施加给车辆的合力矩并且还通过确定在速度变化之前施加给车辆的起始力矩来确定所述速度变化力矩,优选地,通过从合力矩中减去起始力矩来确定所述速度变化力矩。
18.可选地,所述运动变化包括车辆的至少一部分相对于地面段的竖直位置的变化。该竖直位置的变化可以提供地面段的承载能力(例如刚度)的相对准确的结果。
19.可选地,所述控制单元适于向车辆的车轮悬架系统发出信号,从而向车辆施加该车辆的至少一部分相对于地面段的竖直位置的变化。车轮悬架系统的使用意味着一种实现竖直位置变化的成本有效的方式。
20.可选地,所述控制单元适于在车辆的至少一部分相对于地面段的竖直位置变化期间向车辆发出信号,以将扭矩施加给车辆的至少一个车轮,所述控制单元还适于确定指示车轮和地面段之间的摩擦力的值。
21.对于每个法向力值,车轮和地面段之间的摩擦力不一定与施加给车轮的法向力呈线性相关。在车辆的至少一部分相对于地面段的竖直位置的变化期间(该变化可用于确定承载能力),车辆的至少一个车轮可以被施加不同的法向力水平。因此,上述过程意味着可以针对多个不同的法向力水平确定摩擦力值,这进而使得可以根据法向力来确定例如摩擦系数。
22.可选地,所述控制单元适于从以下传感器类型中的至少一种来接收响应信息:车轮负载传感器、底盘倾角传感器、垂直加速度计和倾斜率传感器。在确定该响应信息时,上述传感器中的任一个都可以提供有用信息。
23.可选地,当确定指示地面段的承载能力的值时,所述控制单元适于使用指示沿着该车辆的至少一个旋转轴线的旋转惯量的信息,优选地,所述控制单元适于确定指示该旋转惯量的值。在求解运动方程以确定地面段刚度时,该旋转惯量可能很有用。
24.可选地,在向车辆发出控制信号从而向车辆施加所述运动变化之前,所述控制单元适于向车辆的一个或多个车轮的车轮悬架发出信号,以将车轮悬架的刚度设置为等于或高于预定刚度阈值。仅作为示例,所述控制单元可以适于向车轮悬架发出信号,以将车轮悬架的刚度设置为等于或高于车轮悬架的最大刚度(例如,最大容许刚度)的90%,优选等于或高于其最大刚度的95%。在包括诸如空气的加压介质的车轮悬架的实施方式中,所述控制单元可适于向车轮悬架发出信号,以将车轮悬架介质的压力设置为等于或高于最大压力(例如,最大容许压力)的90%,优选等于或高于最大压力的95%。
25.当向车辆施加运动变化以确定指示地面段的承载能力的值时,如果来自车辆底盘刚度的影响可以保持较低,则将是有益的。为了减少底盘刚度的影响,可以将车轮悬架的刚度设置得比较高,即,比较硬。
26.可选地,在向车辆发出控制信号从而向车辆施加所述运动变化之前,所述控制单元适于向车辆的轮胎压力控制系统发出信号,以将车辆的一个或多个车轮中的轮胎压力设置为等于或高于预定压力阈值。仅作为示例,所述控制单元可适于向轮胎压力控制系统发出信号,以将车辆的一个或多个车轮中的轮胎压力设置为等于或高于最大轮胎压力(例如,最大容许轮胎压力)的90%,优选等于或高于最大轮胎压力的95%。
27.对于车轮悬架,当确定指示所述承载能力的值时,高的轮胎压力意味着来自车轮刚度的影响相对小。
28.可选地,所述控制单元适于接收指示在所述运动变化期间单独施加给车辆的至少一个车轮的负载的信息。通过确定单独施加给至少一个车轮的负载,可以确定指示承载能力(例如刚度)的值,而无需求解整个车辆的运动方程。
29.可选地,所述控制单元适于基于响应信息来确定车辆响应于所施加的运动变化而导致的倾斜度变化。当确定车辆的每个车轮的竖直位置时,该倾斜度变化可能是有用的。
30.可选地,指示承载能力的所述值是指示所述地面段的刚度的值。
31.本发明的第二形态涉及一种车辆,其包括根据前述权利要求中的任一项所述的控制单元。
32.本发明的第三形态涉及一种用于确定指示支撑车辆的地面段的承载能力的值的方法。该方法包括向车辆施加运动变化。
33.此外,根据本发明第三形态的方法还包括:
34.‑
确定车辆的至少一个车轮的竖直位置变化,以及
35.‑
基于所确定的竖直位置变化和所施加的运动变化,确定指示所述地面段的承载能力的值。
36.可选地,所述运动变化包括车辆的速度变化,优选地,所述运动变化包括车辆的减速。
37.可选地,所述方法包括根据车辆的速度变化来确定施加给车辆的速度变化力矩的大小和方向。
38.可选地,所述方法包括通过确定在速度变化之后施加给车辆的合力矩并且还通过确定在速度变化之前施加给车辆的起始力矩来确定该速度变化力矩,优选地,所述方法包括通过从合力矩中减去起始力矩来确定该速度变化力矩。
39.可选地,所述运动变化包括车辆的至少一部分相对于地面段的竖直位置的变化。
40.可选地,所述方法包括:向车辆的车轮悬架系统发出信号,从而向车辆施加该车辆的至少一部分相对于地面段的竖直位置的变化。
41.可选地,所述方法包括在车辆的至少一部分相对于地面段的竖直位置变化期间将扭矩施加给车辆的至少一个车轮,该方法还包括确定指示车轮和地面段之间的摩擦力的值。
42.可选地,所述方法包括从以下传感器类型中的至少一种来接收响应信息:车轮负载传感器、底盘倾角传感器、垂直加速度计和倾斜率传感器。
43.可选地,所述方法包括:在确定指示地面段的承载能力的值时,使用指示沿着车辆的至少一个旋转轴线的旋转惯量的信息,优选地,所述方法包括确定指示该旋转惯量的值。
44.可选地,所述方法包括:在向车辆施加所述运动变化之前,将车辆的一个或多个车轮的车轮悬架的刚度设置为等于或高于预定刚度阈值。
45.可选地,所述方法包括:在向车辆施加所述运动变化之前,将车辆的一个或多个车轮中的轮胎压力设置为等于或高于预定压力阈值。
46.可选地,所述方法包括:接收指示在所述运动变化期间单独施加给车辆的至少一个车轮的负载的信息。
47.可选地,所述方法包括:基于该响应信息来确定车辆响应于所施加的运动变化而导致的倾斜度变化。
48.可选地,指示所述承载能力的值是指示所述地面段的刚度的值。
49.在以下描述和从属权利要求中公开了本发明的其它优点和有利特征。
附图说明
50.参考附图,以下是作为示例引用的本发明实施例的更详细描述。
51.在这些图中:
52.图1是根据本发明的一个实施例的车辆的示意图;
53.图2是根据本发明的另一实施例的车辆的示意图;
54.图3是根据本发明的又一实施例的车辆的示意图;
55.图4是根据本发明的又一实施例的车辆的示意图;
56.图5是根据本发明的又一实施例的车辆的示意图,并且
57.图6是示出了根据本发明的方法的实施例的流程图。
具体实施方式
58.下面将针对卡车10(例如图1中所示的卡车)形式的车辆来描述本发明。卡车10应被视为车辆的一个示例,该车辆可以包括根据本发明的控制单元(可以对该控制单元执行本发明的方法)。然而,本发明可以在多种不同类型的车辆中实施。仅作为示例,本发明可以在卡车、拖车、轿车、公共汽车、诸如轮式装载机的工程机械或任何其它类型的建筑设备中实施。
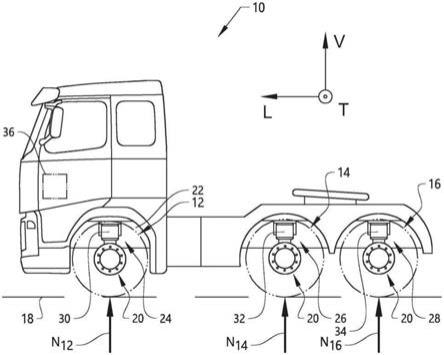
59.图1的车辆10包括一组车轮12、14,车轮12、14中的每一个都适于由地面段16支撑。虽然图1的车辆10的实施例包括一对前轮12和一对后轮14,但当然也可以设想车辆10的其它实施例可以包括更少或更多的车轮。
60.此外,图1的车辆的实施例包括将车轮12、14连接到车辆10的车架20的车轮悬架系统18。在图1的实施方式中,车轮悬架系统18包括将车架20连接到前轮12的前轮悬架系统22、以及将车架20连接到后轮14的后轮悬架系统24。此外,如图1所示,前轮悬架系统22可以包括柔性波纹管26,可以将气体添加到该波纹管26中或从该波纹管26排出。以类似的方式,后轮悬架系统24可以包括柔性波纹管28,可以将气体添加到该波纹管28中或从该波纹管28排出。因此,车轮悬架系统18被布置成在车辆10的运动期间阻尼/吸收来自相应车轮的负载。此外,车轮悬架系统18可以用于控制车辆10相对于地面段16的高度。仅作为示例,前轮悬架系统22和后轮悬架系统24中的每一个都可以用于改变车辆10的至少一部分相对于地面段16的竖直位置。
61.在以下描述中,一般仅提及一个前轮12并且仅提及一个后轮14。然而,应当理解,对前轮12的提及同样适用于所述一对前轮。类似地,对后轮14的提及同样适用于所述一对后轮。
62.另外,图1示出了该车辆在沿纵向轴线l的纵向方向上延伸并且在沿竖直轴线v的竖直方向上延伸。纵向轴线l在平行于车辆10的预期行进方向的方向上延伸,而竖直方向在垂直于地面段16的平面的方向上延伸。
63.图1的车辆10包括控制单元30,该控制单元30用于确定指示支撑车辆的地面段的承载能力的值。尽管图1示出了其中控制单元30物理连接到车辆10(例如位于车辆10中,如图1所示)的实施例,但是根据本发明的第一形态的控制单元30不一定需要物理连接到车辆10。而是,还可想到控制单元30的如下实施例:其中,控制单元30与车辆10分离,并且控制单元30适于使用例如无线通信系统(未示出)与车辆10通信。
64.无论控制单元30相对于该车辆的位置如何,控制单元30都适于:
65.‑
向车辆10发出控制信号,从而向车辆施加运动变化;
66.‑
从车辆10接收响应信息,该响应信息指示了车辆对所施加的运动变化的响应;
67.‑
基于该响应信息,确定所述车辆10的至少一个车轮12、14的竖直位置变化,以及
68.‑
基于所确定的竖直位置变化和所施加的运动变化,确定指示地面段16的承载能力的值。
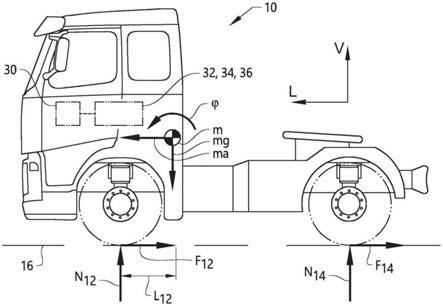
69.作为第一示例,该运动变化可以包括车辆10的速度变化。因此,该运动变化可以包括车辆10的加速或减速。图2示出了该运动变化是减速的示例。
70.如从图2可见,车辆10在减速期间被施加多个负载。应当注意,车辆10还可以被施加除了图2所示和下文中讨论的负载之外的负载,例如拖曳负载。然而,在下面的介绍中,仅限于讨论被认为足以确定指示支撑车辆10的地面段16的承载能力的值的负载。
71.如图2所示,车辆10具有位于重心cog上的质量m,从而产生重力负载mg。此外,车轮12、14中的每一个都被施加法向力n
12
、n
14
。在减速期间,质量m导致惯性负载ma以及车轮12、14上的摩擦负载f
12
、f
14
。此外,车辆10可以被施加与车辆和车辆周围空气之间的相对速度的平方成正比的拖曳负载。
72.上述这些负载可以导致确定所述车辆10的至少一个车轮12、14的竖直位置变化,这又导致车辆10的倾斜度变化。在图1中,该倾斜度变化被例示为车辆10的俯仰角的变化。然而,该倾斜度变化当然也可能是侧倾的变化,或者是侧倾和俯仰组合的变化。仅作为示例,可以使用底盘倾角传感器32(例如底盘俯仰角传感器)和/或倾斜率传感器34(例如俯仰率传感器)来确定该倾斜度变化。作为又一替代,可以使用垂直加速度计36来确定该运动变化(例如倾斜度变化)。
73.倾斜条件的运动方程在下文中给出。为了简化描述,下面的方程已经被限制为俯仰运动,但可以很容易地修改该方程以覆盖一般的倾斜,即包括侧倾分量和俯仰分量的倾斜。作为进一步的替代方案,下面的方程可以应用于纯侧倾条件。不考虑倾斜类型,该方程可以根据下式来表示:
[0074][0075]
其中:
[0076]
m=施加给车辆的力矩;
[0077]
i=沿车辆旋转轴线的旋转惯量,在方程1中被例示为俯仰惯量;
[0078]
b=沿车辆旋转轴线的旋转阻尼,在方程1中被例示为俯仰阻尼;
[0079]
c=沿车辆旋转轴线的旋转刚度,在方程1中被例示为俯仰刚度。
[0080]
可以使用施加给车辆的负载以及相关联的到参考点(例如车辆的cog)的力臂以直接的方式来计算施加给车辆10的力矩m。替代地或另外,使用上述负载和力臂来计算力矩m,可以使用例如惯性测量单元(未示出)来确定力矩m。
[0081]
为了确定指示支撑车辆10的地面段16的承载能力的值,可以假设所述旋转阻尼是可以忽略的,使得b=0,从而产生以下方程:
[0082][0083]
旋转惯量i可以以多种方式来确定。仅作为示例,可以通过计算标称惯量i0和附加惯量i
a
的总和来确定旋转惯量。作为非限制性示例,标称惯量i0可以在车辆10的设计和/或构造期间确定。与车辆的导致标称惯量i0的标称配置相比,可以例如通过确定已经添加到车辆的多个实体中的每一个实体的重量和到所述参考点的距离来确定附加惯量i
a
。例如,货物部件(例如包裹)可以构成这样的实体。知道多个实体中的每一个实体的重量和到所述参考点的距离,就可以使用例如斯坦纳定理来确定附加惯量i
a
。可以在通过引用的方式并入本文的pct/ep2019/055766中找到关于如何确定惯性i的更详细的公开内容。
[0084]
旋转刚度c可以通过以下方式来确定:假设车辆的底盘相对于地面段16的刚度是刚性的,并且假设地面段16不会在竖直方向v上对车轮12、14中的任一个车轮产生负力。
[0085]
因此,在车辆10被施加正向俯仰运动(即图2中的逆时针旋转)的条件下(例如图2中所示的条件),地面段16将向前轮12施加弹性力,该弹性力的大小取决于前轮12下方的地面段16的刚度k
12
以及前轮12压入地面段16中的沉陷度(depression)。
[0086]
使用上述关于旋转刚度c的假设,可以根据下式来确定旋转刚度:
[0087]
c=k
12
·
l
12
ꢀꢀꢀ
方程3
[0088]
其中:
[0089]
k
12
=前轮12下方的地面段16的刚度k
12
,并且
[0090]
l
12
=在纵向方向l上从与前轮12之间的接触点到车辆10的所述参考点(例如,重心)的距离。
[0091]
将方程3代入到方程2中得出以下方程:
[0092][0093]
其中,前轮12下方的地面段16的刚度k
12
可以根据下式来确定:
[0094][0095]
已经在所述运动变化是速度变化的条件下呈现了上述方程1至方程5。在这种条件下,尽管仅作为示例,但控制单元30可适于根据车辆的速度变化来确定施加给车辆10的速度变化力矩m
sc
的大小和方向。在这种条件下,虽然再次仅作为示例,但可以通过确定在所述速度变化之后施加给车辆10的合力矩m
r
并且还通过确定在所述速度变化之前施加给车辆10的起始力矩m
s
来确定速度变化力矩m
sc
。作为非限制性示例,可以根据以下等式通过从合力矩中减去起始力矩来确定速度变化力矩m
sc
:m
sc
=m
r
‑
m
s
。如果速度变化力矩m
sc
被确定并且例如用于方程5,则车辆10的速度变化俯仰(其指示了由速度变化力矩m
sc
引起的俯仰变化的大小)可以用于方程5。在该方程中使用速度变化俯仰的条件下,可以假设速度变化俯仰加速度等于俯仰加速度,即
[0096]
尽管已经针对所述运动变化是车辆10的速度变化(例如减速)的条件呈现了方程1至方程5,但上述方程同样适用于其它类型的速度变化。仅作为示例,该运动变化包括车辆
10的至少一部分相对于地面段16的竖直位置的变化。作为非限制性示例,控制单元16可适于向车辆10的车轮悬架系统18(参见图1)发出信号,从而向车辆10施加该车辆的至少一部分相对于地面段16的竖直位置的变化。
[0097]
因此,使用图3中的条件作为示例,控制单元30可适于使用前轮悬架系统22升高和降低车辆10的前部。知道由前轮悬架系统22施加的力,可以例如再次使用方程5来确定施加给车辆10的力矩并由此确定承载能力(例如地面段16的刚度k
12
)。
[0098]
作为另一种选择,车辆10的至少一部分相对于地面段16的竖直位置可以通过以下方式来实现:布置适于沿着一定轨迹振荡(例如来回移动)的配重(未示出),从而将变化的俯仰力矩施加给车辆10,这又将导致车辆的至少一部分上下移动,该配重的至少一个部件平行于纵向轴线l。
[0099]
在所述运动变化包括车辆10的至少一部分相对于地面段16的竖直位置的变化的条件下,控制单元30可适于在车辆10的至少一部分相对于地面段16的竖直位置的变化期间向车辆10发出信号,以将扭矩t
12
施加给车辆10的至少一个车轮12。此外,控制单元30可适于确定指示车轮12和地面段16之间的摩擦力的值。
[0100]
因此,本发明的发明人已经认识到,车辆10的至少一部分的竖直位置的变化导致了施加到车轮12的改变的法向力n
12
。因此,如果该车轮随着车辆10的竖直位置变化而被施加了扭矩t
12
,则可以确定为摩擦力f
12
和法向力n
12
的不同组合的集合。然后可以使用这样的集合根据法向力n
12
来确定摩擦系数μ。这里,应当注意,摩擦系数μ在很多情况下可能会随着法向力n
12
而变化。例如,当地面段16有雪或冰时,摩擦系数μ可能高度依赖于法向力n
12
,因为大的法向力n
12
可能导致摩擦系数μ大于小法向力n
12
时的摩擦系数μ。当车轮12被单独驱动时(例如借助于单独的电动机(未示出)),可以例如使用上述过程。然而,还可以设想的是,上述过程可以用于其中一个轮轴的车轮可以独立于其它轮轴的车轮被驱动的车辆。
[0101]
虽然已经关于方程1至方程5呈现了本发明的上述实施例(其中已经为车辆10求解了全局运动方程),但也可以通过仅对车辆10的一部分进行局部分析来确定指示地面段16的承载能力的值。
[0102]
例如,如果施加到车轮上的负载以及该车轮压入地面中的沉陷度是已知的,则可以确定指示地面段16的承载能力(例如地面段16的刚度)的值。
[0103]
因此,参考图4,并且使用前轮12作为示例,可以使用车轮负载传感器38来确定施加到第一车轮12的法向力n
12
。仅作为示例,车轮负载传感器38可以被实施为车轮轴承负载传感器,即,适于确定经由轴承(例如轮毂轴承,该轮毂轴承将车轮12连接到车架20)从车轮12传递到车架20的负载的传感器。代替车轮轴承负载传感器或者除了车轮轴承负载传感器之外,车轮负载传感器38可以实施为适于确定由前轮悬架系统22悬挂的负载的传感器。作为非限制性示例,这样的传感器可以实施为压力传感器,该压力传感器确定前轮悬架系统22的柔性波纹管26中的压力。
[0104]
此外,可以使用例如俯仰角以及从该俯仰角的参考点到前轮12与地面段16之间的接触点的距离来确定前轮12压入地面段16中的沉陷度d
12
。
[0105]
一旦已经确定了法向力n
12
和沉陷度d
12
,就可以直接根据下式来确定地面段16的刚度k
12
:
[0106][0107]
当然,还可以设想的是,控制单元30的实施例和/或根据本发明的方法的实施例可以使用全局分析以及一个或多个局部分析来确定指示承载能力的值。仅作为示例,可以想到的是,控制单元30和/或该方法的实施例可使用方程5以及方程6来确定刚度k
12
并且例如使用加权因子合并来自这两个方程的结果。
[0108]
如从上文可以意识到的,车辆10的行为越接近于模拟刚体的行为,就越可以提高指示地面段16的承载能力的值的准确度。
[0109]
为此,控制单元30可适于在执行用于确定指示地面段16的承载能力的值的程序之前修改车辆10的特性。
[0110]
仅作为示例,在向车辆10发出控制信号从而施加车辆10的运动变化之前,控制单元30可适于向车辆的一个或多个车轮12、14的车轮悬架22、24发出信号,以将车轮悬架的刚度设置为等于或高于预定刚度阈值。作为非限制性示例,该控制单元可适于发出控制信号以升高波纹管26、28中的压力。通过增加车轮悬架22、24的刚度,与地面段16的刚度相比,车轮悬架22、24可以被认为是相对刚性的,因此,在所施加的运动变化期间,车轮悬架22、24的刚度对车辆10的行为可能具有相对低的影响。
[0111]
代替增加一个或多个车轮12、14的车轮悬架22、24的刚度或者除了增加一个或多个车轮12、14的车轮悬架22、24的刚度之外,控制单元30可适于在向车辆10发出控制信号从而施加该车辆的运动变化之前向车辆10的轮胎压力控制系统40发出信号,以将车辆10的一个或多个车轮12、14中的轮胎压力设置为等于或高于预定压力阈值。对于上文讨论的车轮悬架刚度,将轮胎压力设置得相对高可能导致一个或多个车轮12、14的刚度可能相对高,这进而可以增加确定指示地面段16的承载能力的值的精度。
[0112]
尽管上文呈现的实施例已被例示为使用车辆10的倾斜度或倾斜度变化来确定车辆的至少一个车轮12、14的竖直位置变化,但可以设想的是,其它实施例可以使用用于确定该竖直位置变化的其它替代方案。
[0113]
为此,参考图5,示出了包括第一竖直距离传感器42的车辆10,该第一竖直距离传感器42适于确定车辆10的参考点与地面段16上的第一点16'之间的第一竖直距离v1。仅作为示例,第一竖直距离传感器42可适于确定第一竖直距离传感器42的位置与地面段16上的第一点16'之间的第一竖直距离v1。
[0114]
以类似的方式,图5的车辆10包括第二竖直距离传感器44,该第二竖直距离传感器44适于确定车辆10的参考点与地面段16上的第二点16”之间的第二竖直距离v2。仅作为示例,第二竖直距离传感器44可适于确定第二竖直距离传感器44的位置与地面段16上的第二点16”之间的第二竖直距离v2。
[0115]
如图5中所示,第一点16'和第二点16”彼此相距纵向传感器距离l
s
。此外,如沿着纵向轴线l所见,第一点16'位于第一车轮12前方,而第二点16”位于第一车轮12和地面段16之间的接触点处或该接触点后方。在图5的实施例中,第二点16”位于第一车轮12和地面段16之间的接触点处,以便在第一车轮12和地面段16之间的接触点的纵向位置处测量第二竖直距离v2。
[0116]
使用上述第一竖直距离传感器42和第二竖直距离传感器44,可以根据以下方式来
确定车辆10的至少一个车轮12、14(这里使用第一车轮12为例)的竖直位置变化。
[0117]
在第一时刻t1使用第一竖直距离传感器42来确定车辆10的参考点与地面段16上的第一点16'之间的第一竖直距离v1。利用指示了例如第一竖直距离v1以及可能还有车辆10的初始倾斜角(例如初始俯仰角)的信息,可以确定当车辆10已经行进了所述纵向传感器距离l
s
而使得地面段16上的第二点16”在第二时刻t2位于所述第一点16'在第一时刻t1的纵向位置时、在第二时刻t2的预期的第二竖直距离v
2,exp
。此外,利用指示车辆10的速度以及纵向传感器距离l
s
的信息,可以确定第二时刻t2以及在第二时刻t2的实际第二竖直距离v
2,act
。
[0118]
利用所述预期的第二竖直距离v
2,exp
以及实际第二竖直距离v
2,act
,可以确定第一车轮12的竖直位置变化。
[0119]
本发明还涉及一种用于确定指示支撑车辆的地面段的承载能力的值的方法。参考图6,该方法包括:
[0120]
s10向该车辆施加运动变化;
[0121]
s12确定该车辆的至少一个车轮的竖直位置变化,以及
[0122]
s14基于所确定的竖直位置变化和所施加的运动变化,确定指示所述地面段的承载能力的值。
[0123]
当然,根据本发明的方法的实施例可以包括上文已经讨论过的控制单元30的任一实施例的特征。例如,虽然上述实施例中的每一个都将刚度值确定为指示地面段16的承载能力的值,但也可以设想的是,可以确定其它类型的值。例如,可以设想的是,本发明的实施例可以根据承载水平(例如“低”、“中”或“高”等)来确定指示地面段16的承载能力的值。
[0124]
应当理解,本发明不限于上文所述和附图中示出的实施例;而是,本领域技术人员将认识到,可以在所附权利要求书的范围内进行许多修改和变型。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。