1.本发明属于作战保障装备技术领域,特别涉及一种两栖无人机械手破障装备。
背景技术:
2.目前在两栖登陆作战中,对登陆场三角锥、轨条砦的清除,主要采用航空炸弹进行轰炸,而后采用人工进行单个破障。航弹爆破效率低,作战成本高,毁伤半径有限,精度较低,部分三角锥、轨条砦的毁伤程度未达到越障标准或被气浪掀倒形成二次障碍;同事会产生弹坑等二次障碍不利于装备的登陆。人工破障则由两栖登陆部队中的工兵部队采用单兵破障工具对航弹爆破后的残余轨条砦、三角锥进行破障,虽然可以有效扫残破障,但导致士兵直接暴露在敌方火力范围内,作战伤亡较大。综上所述,目前登陆作战中,缺少高效、安全的无人破障装备。
技术实现要素:
3.本发明的目的就是为了解决上述背景技术中存在的问题,而提出一种两栖无人机械手破障装备。
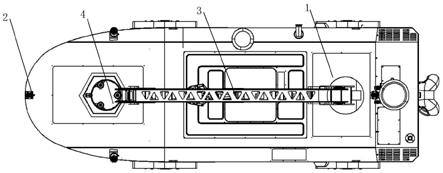
4.本发明所涉及一种两栖无人机械手破障装备,由两栖无人平台1、车载传感器2、多功能机械手3、破障弹药箱4构成,其特征是:车载传感器2通过标准件与安装支架环布紧固于两栖无人平台1车身四周;多功能机械手3的安装支座通过标准件居中后置安装在两栖无人平台1后舱顶盖板预留的安装孔处;破障弹药箱4通过标准件居中前置安装在两栖无人平台1前舱预留的安装接口处。本装备各组件间的信息交互主要依托于车载以太网与can口通信。
5.本产品主要是运用基于两栖无人平台1的自主破障的定位识别技术。针对多功能机械手3破障作业时,可通过车载传感器2对目标障碍物进行识别与标定,构建其激光点云模型,并将其位置数据回传至两栖无人平台1解算,再由两栖无人平台1中的组合导航装置结合车载高精地图换算目标实时坐标。两栖无人平台1自主行驶至目标障碍物附近后,多功能机械手3再由根据两栖无人平台1位置解算的相对位置,自主分配机械臂关节,完成启动、收放、抓弹、取弹、放弹等步骤,将破障弹药放置在障碍物上选定位置上,通过延迟起爆或遥控起爆的方式引爆药包,实现三角锥、轨条砦的破除。
6.本发明的两栖无人机械手破障装备作业安全、可靠、可实现对障碍目标的识别、定位、爆破由装备自主完成,可大幅度降低破障成本、减轻人员伤亡风险。
附图说明
7.图1本发明的两栖无人机械手破障装备安装示意图
8.图1中:1-两栖无人平台、2-车载传感器、3-多功能机械手、4-破障弹药箱
具体实施方式
9.下面结合附图与作战设想对发明进一步说明。
10.1水上破障实施
11.采用车载传感器2对水上障碍进行探测、定位,将定位信息传输至两栖无人平台1,两栖无人平台1结合车辆位置、障碍信息,规划智能两栖无人破障装备路线、速度,控制两栖无人平台1到障碍物附近,多功能机械手3再自主分配关节于破障弹药箱4处取弹,并通过规划设计好的逻辑与定位系统相结合,安放在障碍物指定位置,然后两栖无人平台1撤离,弹药延时引爆完成破障。
12.2陆上破障实施
13.采用车载传感器2对陆上障碍进行探测、定位,将定位信息传输至两栖无人平台1,两栖无人平台1结合车辆位置、障碍信息,规划智能两栖无人破障装备路线、速度,控制两栖无人平台1到障碍物附近,多功能机械手3再自主分配关节于破障弹药箱4处取弹,并通过规划设计好的逻辑与定位系统相结合,安放在障碍物指定位置,然后两栖无人平台1撤离,弹药延时引爆完成破障。
14.本装备作业安全、可靠、可实现对障碍目标的识别、定位、爆破由装备自主完成,可大幅度降低破障成本、减轻人员伤亡风险。
技术特征:
1.一种两栖无人机械手破障装备,由两栖无人平台(1)、车载传感器(2)、多功能机械手(3)、破障弹药箱(4)构成,其特征是:车载传感器(2)通过标准件与安装支架环布紧固于两栖无人平台(1)车身四周;多功能机械手(3)的安装支座通过标准件居中后置安装在两栖无人平台(1)后舱顶盖板预留的安装孔处;破障弹药箱(4)通过标准件居中前置安装在两栖无人平台(1)前舱预留的安装接口处;多功能机械手(3)破障作业时,通过车载传感器(2)对目标障碍物进行识别与标定,构建其激光点云模型,并将其位置数据回传至两栖无人平台(1)解算,再由两栖无人平台(1)中的组合导航装置结合车载高精地图换算目标实时坐标;两栖无人平台(1)自主行驶至目标障碍物附近后,多功能机械手(3)再由根据两栖无人平台(1)位置解算的相对位置,自主分配机械臂关节,完成启动、收放、抓弹、取弹、放弹等步骤,将破障弹药放置在障碍物上选定位置上,通过延迟起爆或遥控起爆的方式引爆药包,实现三角锥、轨条砦的破除。
技术总结
一种两栖无人机械手破障装备,由两栖无人平台(1)、车载传感器(2)、多功能机械手(3)、破障弹药箱(4)等4个组件构成:车载传感器(2)通过标准件与安装支架环布紧固于两栖无人平台(1)车身四周;多功能机械手(3)的安装支座通过标准件居中后置安装在两栖无人平台(1)后舱顶盖板预留的安装孔处;破障弹药箱(4)通过标准件居中前置安装在两栖无人平台(1)前舱预留的安装接口处;本装备各组件间的信息交互主要依托于车载以太网与CAN口通信。本发明的两栖无人机械手破障装备作业安全、可靠、可实现对障碍目标的识别、定位、爆破由装备自主完成,可大幅度降低破障成本、减轻人员伤亡风险。减轻人员伤亡风险。减轻人员伤亡风险。
技术研发人员:韦韬 王伟 李宜航 李俊 黄德见
受保护的技术使用者:重庆望江工业有限公司
技术研发日:2021.11.05
技术公布日:2022/3/1
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。