1.本发明涉及一种机器人,具体涉及一种基于人工智能的餐具回收机器人系统,属于人工智能和智能控制技术领域。
背景技术:
2.目前在公司、学校、工厂等大型食堂都有专门的餐盘回收处,并有专门的负责人将人们用过的餐盘进行回收,工作人员需将不同餐具中的剩饭剩菜导入泔水桶,还要把用过的餐盘餐具送至洗碗间进行统一清洗,这一过程费时费人费力,在用餐高峰期人工回收餐盘效率低下,并且随着人口减少,相关工作人员难以招聘,出现用工缺口。
技术实现要素:
3.针对以上技术问题,本发明提供了一种基于人工智能的餐具回收机器人系统。
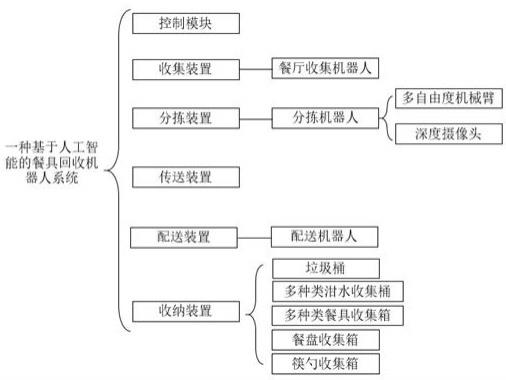
4.本发明为实现上述目的,通过以下技术方案实现:一种基于人工智能的餐具回收机器人系统,包括控制模块、收集装置、分拣装置、传送装置、配送装置和收纳装置,分拣装置包括多自由度机械臂及深度摄像头,传送装置包括传送机、传送带和传送轨道,配送装置为配送机器人,收纳装置包括垃圾桶、多种类泔水收集桶、多种类餐具收集箱、餐盘收集箱和筷勺收集箱。
5.上述基于人工智能的餐具回收机器人系统基础上,收集装置为餐厅收集机器人,收集机器人为双轮驱动结构,装载机械臂,顶部负载为分层式餐盘放置区。
6.上述基于人工智能的餐具回收机器人系统基础上,分拣装置配备至少三组多自由度机械臂及空中深度摄像头识别装置,深度摄像头主要用以采集分拣区域的图像画面,控制模块根据采集的图像信息,根据餐盘餐具的颜色、形状进行自动分类,同时检测当前区域内餐盘餐具的位置及距离信息,再由控制模块分配机械臂完成剩饭剩菜的倾倒及餐具的分拣。
7.上述基于人工智能的餐具回收机器人系统基础上,传送装置贯穿整个自动回收系统,传送装置的启停均受控制模块控制,传送带末端略向下倾斜,同时末端摆放餐盘收集箱。
8.上述基于人工智能的餐具回收机器人系统基础上,收纳装置均放置在具有重量监测的平层货架上,其中垃圾桶及筷勺收集箱分别位于该系统接收餐盘传送带的两侧,泔水收集桶、多种类餐具收集箱分别位于分拣装置周围。
9.上述基于人工智能的餐具回收机器人系统基础上,配送装置包括至少为2台配送机器人,用于上述各种收纳装置的转运,配送机器人自带顶升装置,接收到不同位置货架的满载信号时,一台配送机器人将满载收纳箱运回清洗处或回收处,另一台配送机器人将空载收纳箱替换至原位置。
10.上述基于人工智能的餐具回收机器人系统基础上,利用该系统进行餐具回收方法布骤如下:
s100、收集机器人在餐厅内巡逻收集剩菜剩饭餐盘餐具,同时将餐盘餐具放置在自动回收系统的收集处;具体包括以下步骤:s101:餐厅餐桌上放置结束就餐按键,顾客结束用餐后将所有餐后物品放置在餐盘内,按下结束就餐按键,餐厅采集机器人自动前往进行餐具回收;s102:餐厅采集机器人到达该位置后利用机械臂将其放置在上层的餐盘放置区;s103:餐厅采集机器人的分层队列式餐盘放置区可自动检测某一层餐盘放置区内是否放置餐盘,已放置餐盘的放置层自动循环向下,未放置餐盘的放置层自动循环向上运动,当所有放置区放置满载后自动前往回收系统的收集区;s104:在回收系统的收集区采集机器人基于顶部的深度摄像头结合机械臂自动将筷勺放入旁边的筷勺收集箱,将垃圾放入另一侧的垃圾桶,剩余餐盘放置在传送带上;s105:若前方无餐盘等待分拣回收,当传送带检测到餐盘后自动运行,将餐盘餐具等传送至分拣机器人;s200、自动回收系统通过传送带将餐盘餐具传输至分拣处分拣;具体包括以下步骤:s201:分拣机器人接收到餐盘餐具后,暂停传送带传输;s202:分拣机器人空中深度摄像头覆盖分拣区域,拍照获取当前图像信息,控制模块利用图像识别技术,根据颜色、形状等对当前餐盘内的餐具进行种类分类及数量统计,同时根据深度数据完成餐具的位置定位;s203:控制模块根据识别结果精准控制机械臂将不同餐具内的剩饭剩菜倾倒至不同的泔水收集桶,倾倒完成后将餐具分类放入不同种类的餐具收集箱,完成一系列动作后机械臂复位等待下一步操作;s204:分拣机械臂完成分拣动作后,控制模块继续传送带传输,将餐盘传送至传送带末端,利用末端的倾斜角度使餐盘自动滑入餐盘收集箱;s300、餐盘餐具分拣数量达到一定数量后通知配送机器人回收更换;具体包括以下步骤:s301:餐盘餐具及其他收纳箱内重量达到设定满载值时,通过短距离通信机制发送信号至配送机器人;s302:配送机器人接收信号后,由一台机器人搭载新的收纳箱,另一台机器人空载同时前往满载收集箱处;s303:空载机器人使用自身的顶升装置运走满载的收集箱,搭载新的收集箱的配送机器人将其卸载在原位置,完成收集箱的替换;s304:满载收集箱由配送机器人运至洗碗处,进行清洁消毒,清洁消毒后由配送机器人直接配送至分餐处。
11.本发明的优点在于:1、本系统能够自动分拣餐盘餐具,完成剩饭剩菜的集中回收,同时回收过程中可合理的将在餐盘内的饭菜和汤水分离。
12.2、本系统在回收过程中自动收集剩菜剩饭餐盘,同时自动完成空载及满载收集箱的更换,并将消毒后的餐盘餐具再次配送至分餐处,方便快捷,减少了人工劳动量,提高了
工作效率及餐盘回收处的环境卫生。
附图说明
13.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。
14.图1为本发明的基于人工智能的餐具回收机器人系统的组成示意图。
15.图2为本发明的基于人工智能的餐具回收机器人系统的流程示意图。
具体实施方式
16.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
17.参考图1,一种基于人工智能的餐具回收机器人系统,包括控制模块、收集装置、分拣装置、传送装置、配送装置和收纳装置,分拣装置包括多自由度机械臂及深度摄像头,传送装置包括传送机、传送带和传送轨道,配送装置为配送机器人,收纳装置包括垃圾桶、多种类泔水收集桶、多种类餐具收集箱、餐盘收集箱和筷勺收集箱。
18.本实施例中,收集装置为餐厅收集机器人,收集机器人为双轮驱动结构,装载机械臂,顶部负载为分层式餐盘放置区。
19.本实施例中,分拣装置配备至少三组多自由度机械臂及空中深度摄像头识别装置,深度摄像头主要用以采集分拣区域的图像画面,控制模块根据采集的图像信息,根据餐盘餐具的颜色、形状进行自动分类,同时检测当前区域内餐盘餐具的位置及距离信息,再由控制模块分配机械臂完成剩饭剩菜的倾倒及餐具的分拣。
20.本实施例中,传送装置贯穿整个自动回收系统,传送装置的启停均受控制模块控制,传送带末端略向下倾斜,同时末端摆放餐盘收集箱。
21.本实施例中,收纳装置均放置在具有重量监测的平层货架上,其中垃圾桶及筷勺收集箱分别位于该系统接收餐盘传送带的两侧,泔水收集桶、多种类餐具收集箱分别位于分拣装置周围。
22.本实施例中,配送装置包括至少为2台配送机器人,用于上述各种收纳装置的转运,配送机器人自带顶升装置,接收到不同位置货架的满载信号时,一台配送机器人将满载收纳箱运回清洗处或回收处,另一台配送机器人将空载收纳箱替换至原位置。
23.一种基于人工智能的餐具回收机器人系统,利用该系统进行餐具回收方法布骤如下:s100、收集机器人在餐厅内巡逻收集剩菜剩饭餐盘餐具,同时将餐盘餐具放置在自动回收系统的收集处;具体包括以下步骤:s101:餐厅餐桌上放置结束就餐按键,顾客结束用餐后将所有餐后物品放置在餐盘内,按下结束就餐按键,餐厅采集机器人自动前往进行餐具回收;s102:餐厅采集机器人到达该位置后利用机械臂将其放置在上层的餐盘放置区;
s103:餐厅采集机器人的分层队列式餐盘放置区可自动检测某一层餐盘放置区内是否放置餐盘,已放置餐盘的放置层自动循环向下,未放置餐盘的放置层自动循环向上运动,当所有放置区放置满载后自动前往回收系统的收集区;s104:在回收系统的收集区采集机器人基于顶部的深度摄像头结合机械臂自动将筷勺放入旁边的筷勺收集箱,将垃圾放入另一侧的垃圾桶,剩余餐盘放置在传送带上;s105:若前方无餐盘等待分拣回收,当传送带检测到餐盘后自动运行,将餐盘餐具等传送至分拣机器人;s200、自动回收系统通过传送带将餐盘餐具传输至分拣处分拣;具体包括以下步骤:s201:分拣机器人接收到餐盘餐具后,暂停传送带传输;s202:分拣机器人空中深度摄像头覆盖分拣区域,拍照获取当前图像信息,控制模块利用图像识别技术,根据颜色、形状等对当前餐盘内的餐具进行种类分类及数量统计,同时根据深度数据完成餐具的位置定位;s203:控制模块根据识别结果精准控制机械臂将不同餐具内的剩饭剩菜倾倒至不同的泔水收集桶,倾倒完成后将餐具分类放入不同种类的餐具收集箱,完成一系列动作后机械臂复位等待下一步操作;s204:分拣机械臂完成分拣动作后,控制模块继续传送带传输,将餐盘传送至传送带末端,利用末端的倾斜角度使餐盘自动滑入餐盘收集箱;s300、餐盘餐具分拣数量达到一定数量后通知配送机器人回收更换;具体包括以下步骤:s301:餐盘餐具及其他收纳箱内重量达到设定满载值时,通过短距离通信机制发送信号至配送机器人;s302:配送机器人接收信号后,由一台机器人搭载新的收纳箱,另一台机器人空载同时前往满载收集箱处;s303:空载机器人使用自身的顶升装置运走满载的收集箱,搭载新的收集箱的配送机器人将其卸载在原位置,完成收集箱的替换;s304:满载收集箱由配送机器人运至洗碗处,进行清洁消毒,清洁消毒后由配送机器人直接配送至分餐处。
24.最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。