技术特征:
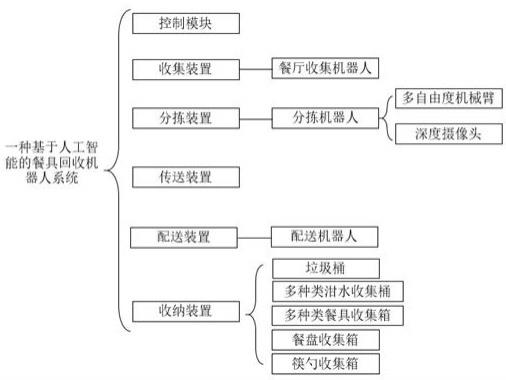
1.一种基于人工智能的餐具回收机器人系统,其特征在于:包括控制模块、收集装置、分拣装置、传送装置、配送装置和收纳装置,分拣装置包括多自由度机械臂及深度摄像头,传送装置包括传送机、传送带和传送轨道,配送装置为配送机器人,收纳装置包括垃圾桶、多种类泔水收集桶、多种类餐具收集箱、餐盘收集箱和筷勺收集箱。2.根据权利要求1所述基于人工智能的餐具回收机器人系统,其特征在于:收集装置为餐厅收集机器人,收集机器人为双轮驱动结构,装载机械臂,顶部负载为分层式餐盘放置区。3.根据权利要求1所述基于人工智能的餐具回收机器人系统,其特征在于:分拣装置配备至少三组多自由度机械臂及空中深度摄像头识别装置,深度摄像头主要用以采集分拣区域的图像画面,控制模块根据采集的图像信息,根据餐盘餐具的颜色、形状进行自动分类,同时检测当前区域内餐盘餐具的位置及距离信息,再由控制模块分配机械臂完成剩饭剩菜的倾倒及餐具的分拣。4.根据权利要求1所述基于人工智能的餐具回收机器人系统,其特征在于:传送装置贯穿整个自动回收系统,传送装置的启停均受控制模块控制,传送带末端略向下倾斜,同时末端摆放餐盘收集箱。5.根据权利要求1所述所述基于人工智能的餐具回收机器人系统,其特征在于:收纳装置均放置在具有重量监测的平层货架上,其中垃圾桶及筷勺收集箱分别位于该系统接收餐盘传送带的两侧,泔水收集桶、多种类餐具收集箱分别位于分拣装置周围。6.根据权利要求1所述所述基于人工智能的餐具回收机器人系统,其特征在于:配送装置包括至少为2台配送机器人,用于上述各种收纳装置的转运,配送机器人自带顶升装置,接收到不同位置货架的满载信号时,一台配送机器人将满载收纳箱运回清洗处或回收处,另一台配送机器人将空载收纳箱替换至原位置。7.根据权利要求1至6任一项所述基于人工智能的餐具回收机器人系统,其特征在于:利用该系统进行餐具回收方法布骤如下:s100、收集机器人在餐厅内巡逻收集剩菜剩饭餐盘餐具,同时将餐盘餐具放置在自动回收系统的收集处;具体包括以下步骤:s101:餐厅餐桌上放置结束就餐按键,顾客结束用餐后将所有餐后物品放置在餐盘内,按下结束就餐按键,餐厅采集机器人自动前往进行餐具回收;s102:餐厅采集机器人到达该位置后利用机械臂将其放置在上层的餐盘放置区;s103:餐厅采集机器人的分层队列式餐盘放置区可自动检测某一层餐盘放置区内是否放置餐盘,已放置餐盘的放置层自动循环向下,未放置餐盘的放置层自动循环向上运动,当所有放置区放置满载后自动前往回收系统的收集区;s104:在回收系统的收集区采集机器人基于顶部的深度摄像头结合机械臂自动将筷勺放入旁边的筷勺收集箱,将垃圾放入另一侧的垃圾桶,剩余餐盘放置在传送带上;s105:若前方无餐盘等待分拣回收,当传送带检测到餐盘后自动运行,将餐盘餐具等传送至分拣机器人;s200、自动回收系统通过传送带将餐盘餐具传输至分拣处分拣;具体包括以下步骤:
s201:分拣机器人接收到餐盘餐具后,暂停传送带传输;s202:分拣机器人空中深度摄像头覆盖分拣区域,拍照获取当前图像信息,控制模块利用图像识别技术,根据颜色、形状等对当前餐盘内的餐具进行种类分类及数量统计,同时根据深度数据完成餐具的位置定位;s203:控制模块根据识别结果精准控制机械臂将不同餐具内的剩饭剩菜倾倒至不同的泔水收集桶,倾倒完成后将餐具分类放入不同种类的餐具收集箱,完成一系列动作后机械臂复位等待下一步操作;s204:分拣机械臂完成分拣动作后,控制模块继续传送带传输,将餐盘传送至传送带末端,利用末端的倾斜角度使餐盘自动滑入餐盘收集箱;s300、餐盘餐具分拣数量达到一定数量后通知配送机器人回收更换;具体包括以下步骤:s301:餐盘餐具及其他收纳箱内重量达到设定满载值时,通过短距离通信机制发送信号至配送机器人;s302:配送机器人接收信号后,由一台机器人搭载新的收纳箱,另一台机器人空载同时前往满载收集箱处;s303:空载机器人使用自身的顶升装置运走满载的收集箱,搭载新的收集箱的配送机器人将其卸载在原位置,完成收集箱的替换;s304:满载收集箱由配送机器人运至洗碗处,进行清洁消毒,清洁消毒后由配送机器人直接配送至分餐处。
技术总结
本发明提供了一种基于人工智能的餐具回收机器人系统。其包括控制模块、收集装置、分拣装置、传送装置、配送装置和收纳装置,分拣装置包括多自由度机械臂及深度摄像头,传送装置包括传送机、传送带和传送轨道,配送装置为配送机器人,收纳装置包括垃圾桶、多种类泔水收集桶、多种类餐具收集箱、餐盘收集箱和筷勺收集箱。箱。箱。
技术研发人员:高明 郝济耀 王建华 马辰
受保护的技术使用者:山东新一代信息产业技术研究院有限公司
技术研发日:2021.11.12
技术公布日:2022/2/28
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。