1.本发明涉及把持物品的机器人手以及具备该机器人手的拣选系统。
背景技术:
2.近年来,已知有利用搬运机器人来保持从预定的场所上游的工序搬入的物品并将其搬出至预定的场所的拣选系统。并且,在搬出机器人设有把持物品的机器人手。
3.作为与把持物品的机器人手相关的技术,例如有专利文献1所记载的技术。在专利文献1中记载了具备指尖连杆、基部连杆、多个棒状指形部连杆机构、以及与基部连杆连接并使多个棒状指形部连杆机构绕基部连杆旋转的促动器的技术。
4.并且,在机器人手所把持的物体中,存在厚度不同的物体、硬度不同的物体。而且,在把持比较柔软的物品时,需要以不会使物品破损的方式把持物品。因此,在专利文献1所记载的技术中,在把持物品的把持部设有压敏传感器。
5.现有技术文献
6.专利文献
7.专利文献1:日本特表2018-507116号公报
技术实现要素:
8.发明所要解决的课题
9.然而,在专利文献1所记载的技术中,基于压敏传感器的检测信号,对促动器进行反馈控制,来控制把持部的把持物体的力。因此,在专利文献1所记载的技术中,把持部、促动器的控制变得非常繁杂。
10.考虑到上述问题点,本发明的目的在于提供能够以简单的结构来把持物品的机器人手以及拣选系统。
11.用于解决课题的方案
12.为了解决上述课题并实现目的,机器人手具备:把持部,其把持物品;把持驱动机构,其使把持部可动;以及控制装置,其控制把持驱动机构的驱动。而且,控制装置控制把持驱动机构的驱动,将把持部把持物品的力设为第一力来开始把持动作,之后将把持部把持物品的力切换为第二力。
13.并且,拣选系统具备搬运物品的搬运机器人和设于搬运机器人的机器人手。另外,机器人手使用上述的机器人手。
14.发明的效果如下。
15.根据上述结构的机器人手以及拣选系统,能够以简单的结构来可靠地把持物品。
附图说明
16.图1是示出实施方式例的拣选系统的简要结构图。
17.图2是示出实施方式例的机器人手的立体图。
18.图3是示出实施方式例的机器人手的主视图。
19.图4是示出实施方式例的机器人手进行动作后的状态的主视图。
20.图5是示出实施方式例的机器人手吸附把持有物品的状态的主视图。
21.图6a至图6d是示出实施方式例的拣选系统的动作例的说明图。
22.图7a至图7c是示出实施方式例的拣选系统的动作例的说明图。
23.图8a至图8d是示出实施方式例的拣选系统的动作例的另一例的说明图。
24.符号的说明
25.1—机器人手,10—支撑部,11a、11b—第一把持部,14—吸附垫,15—伸缩臂,16a、16b—把持驱动机构,17—把持用促动器(驱动部),18—电磁制动器(锁定机构),21—臂,22—指部,23—臂支撑部,24—转动部,24a—狭缝,26—转动轴,31—导轨,32—摆动部,33—伸缩部,34—摆动轴,37—摆动用促动器,80—拣选系统,81—搬运机器人,85—摄像头,100—物品。
具体实施方式
26.以下,参照图1~图8d对机器人手以及拣选系统的实施方式例进行说明。其中,在各图中,对共同的部件标注同一符号。
27.1.实施方式例
28.1-1.拣选系统的结构例
29.首先,参照图1对实施方式例(以下称为“本例”)的拣选系统的结构进行说明。
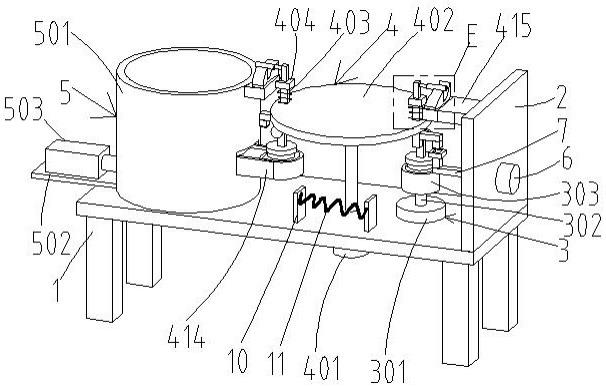
30.图1是示出本例的拣选系统的简要结构图。
31.如图1所示,拣选系统80具备搬运机器人81、向搬运机器人81搬入物品100的搬入输送机82、移动机构83、摄像头85、以及搬出集装箱300。拣选系统80将物品100搬运至搬出集装箱300。并且,拣选系统80具有对搬运机器人81、搬入输送机82、移动机构83、以及摄像头85等进行控制的未图示的控制装置。
32.搬运机器人81例如是具有六轴关节的垂直多关节机器人。在搬运机器人81的臂设有吸附并把持物品100的机器人手1。在下文中说明机器人手1的详细内容。
33.摄像头85配置于搬运机器人81使用机器人手1来把持物品100的位置的上方。摄像头85对从搬入输送机82搬入的物品100进行拍摄。然后,摄像头85将拍摄到的信息输出至未图示的控制装置。控制装置基于从摄像头85获取到的信息,辨别物品100的位置、物品100的大小等与物品100相关的信息。而且,控制装置基于与物品100相关的信息,控制搬运机器人81以及机器人手1的动作。
34.此外,在本例的拣选系统80中,说明了将摄像头85设于把持物品100的位置的上方的例子,但并不限定于此。例如,也可以将摄像头85设于搬运机器人81、机器人手1,或者也可以配置于把持物品100的位置的侧方等。
35.另外,对控制装置基于摄像头85所拍摄到的信息来辨别物品100的大小、类别等的例子进行了说明,但并不限定于此,例如,也可以预先向控制装置输入与物品100的大小、类别等相关的信息。
36.搬运机器人81由移动机构83支撑为能够在一个轴方向上移动。在移动机构83的移动方向的一侧配置有搬入输送机82。搬入输送机82将收纳有多个物品100的收纳瓦楞纸箱
200从拣选系统80的上游侧的工序输送至预定的位置。
37.在移动机构83的移动方向的另一侧配置有搬出集装箱300。在搬出集装箱300中收纳由搬运机器人81搬出后的物品100。对由移动机构83使搬运机器人81移动的例子进行了说明,但并不限定于此,也可以在搬运机器人81自身设置移动机构,或者也可以固定搬运机器人81。
38.此外,作为拣选系统80,对将物品100收纳于搬出集装箱300的例子进行了说明,但并不限定于此。作为拣选系统80,例如也可以应用将利用搬运机器人81的机器人手1把持的物品100搬运至搬出输送机、或者收纳于收纳架的其它各种拣选系统80。
39.并且,作为搬运机器人81,对应用了具有六轴关节的垂直多关节机器人的例子进行了说明,但并不限定于此。作为搬运机器人81,可以应用进行水平方向的旋转和铅垂方向的移动的两轴的机器人,也可以应用其它各种机器人。
40.1-2.机器人手的结构例
41.接下来,参照图2至图5对设于搬运机器人81的机器人手1的详细结构进行说明。
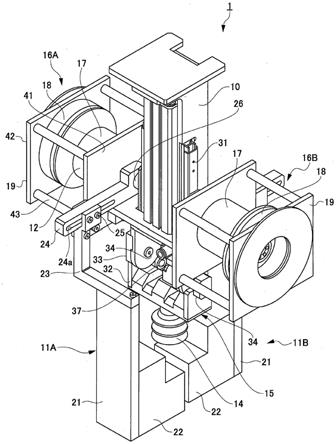
42.图2是示出机器人手1的立体图,图3是示出机器人手1的主视图。图4是示出机器人手1驱动后的状态的主视图,图5是示出机器人手1吸附把持有物品100的状态的主视图。
43.如图2及图3所示,机器人手1具有安装于搬运机器人81的主体部10、两个把持部11a、11b、吸附垫14、伸缩臂15以及两个把持驱动机构16a、16b。
44.伸缩臂15设于主体部10中的与安装于机器人手1的基端部相反的一侧、即前端部。伸缩臂15具有导轨31、摆动部32、伸缩部33、摆动轴34、摆动用促动器37以及未图示的缸筒。作为摆动用促动器37,例如应用旋转促动器。
45.导轨31设于主体部10的侧面部。而且,导轨31沿主体部10的从基端部朝向前端部的方向亦即长度方向延伸。伸缩部33能够移动地支撑于导轨31。
46.如图4所示,伸缩部33利用设于主体部10的内部的缸筒来沿主体部10的长度方向伸缩。其中,虽然对利用缸筒使伸缩部33伸缩的例子进行了说明,但并不限定于此,例如也可以应用线性促动器、齿轮以及马达等其它各种伸缩机构。
47.在伸缩部33的与主体部10相反的一侧的端部、即前端部经由摆动轴34能够摆动地安装有摆动部32。并且,在摆动用促动器37未驱动的状态、即断开的状态下,摆动部32成为相对于摆动轴34能够自由摆动的状态。而且,通过驱动摆动用促动器37,来使摆动部32以摆动轴34为中心摆动,并保持相对于伸缩部33的摆动角度。此外,通过由控制装置控制摆动用促动器37的驱动,来设定摆动部32相对于伸缩部33的摆动角度。并且,在摆动部32的与伸缩部33相反的一侧的端部、即前端部设有吸附垫14。
48.吸附垫14由具有挠性的部件呈波纹状地形成。吸附垫14与未图示的负压产生装置连接。吸附垫14与物品100接触,通过驱动负压产生装置,来如图5所示地吸附垫14吸附物品100。
49.如图2及图3所示,第一把持驱动机构16a设于主体部10的侧面部。并且,第二把持驱动机构16b设于主体部10的与设有第一把持驱动机构16a的侧面部相反一侧的侧面部。第一把持驱动机构16a及第二把持驱动机构16b分别具有同一结构,因而此处对第一把持驱动机构16a进行说明。
50.第一把持驱动机构16a具有表示驱动部的把持用促动器17、表示锁定机构的电磁
制动器18、以及壳体19。壳体19具有第一支撑板41、第二支撑板42以及连接部43。第一支撑板41固定于主体部10的侧面部。第二支撑板42与第一支撑板41隔开间隔地对置。而且,第一支撑板41与第二支撑板42通过连接部43连接。
51.在第一支撑板41与第二支撑板42之间配置有把持用促动器17和电磁制动器18。把持用促动器17固定于第一支撑板41,电磁制动器18固定于第二支撑板42。把持用促动器17应用旋转促动器。并且,在把持用促动器17的驱动轴的一端部连接有下述的第一把持部11a的转动轴26。另外,在第一支撑板41安装有转动轴26。
52.并且,在把持用促动器17的驱动轴的另一端部设有电磁制动器18。通过驱动电磁制动器18,来将把持用促动器17的驱动轴锁定在任意的转动角度。在本例中,把持用促动器17驱动时的力相当于第一力,电磁制动器18锁定把持用促动器17的驱动轴的力相当于第二力。
53.对为了锁定把持用促动器17的转动而使用了电磁制动器18的例子进行了说明,但并不限定于此。例如,也可以应用棘轮机构、固定下述的把持部11a、11b的转动(移动)的固定销等其它各种锁定机构。
54.把持驱动机构16a、16b将把持部11a、11b支撑为能够开闭。具体而言,在第一把持驱动机构16a安装有第一把持部11a,在第二把持驱动机构16b安装有第二把持部11b。第一把持部11a及第二把持部11b分别具有同一结构,因而此处对第一把持部11a进行说明。
55.第一把持部11a具备臂21、指部22、臂支撑部23、转动部24以及转动部26。如上所述,转动轴26与把持用促动器17的驱动轴连接。在转动轴26能够转动地连接有转动部24。
56.转动部24从转动轴26的轴向朝向正交的方向突出。在转动部24形成有狭缝24a。狭缝24a形成于转动部24的与连接于转动轴26的一端部相反一侧的另一端部。而且,狭缝24a以预定的长度从另一端部延伸至一端部。在该狭缝24a利用调整螺纹件25以能够移动的方式安装有臂支撑部23。而且,通过拧紧调整螺纹件25,能够相对于狭缝24a将臂支撑部23固定于任意的位置。
57.臂支撑部23由大致呈l字状的部件形成。臂支撑部23的与转动部24的连接部位相反一侧的前端部朝向远离转动部24的方向折曲。而且,第一把持部11a和第二把持部11b中的臂支撑部23的前端部介于伸缩臂15相互对置。在该臂支撑部23的前端部固定有臂21。
58.臂21从臂支撑部23的前端部朝向远离转动部24的方向突出。在臂21的前端部设有与物品100接触的指部22。作为指部22,例如由橡胶、海绵等具有柔软性的部件形成。由此,在指部22与物品100接触时,能够防止物品100受到损伤。
59.在图3所示的初始状态下,第一把持部11a及第二把持部11b的指部22接近。然后,如图4所示,若驱动把持用促动器17,则转动部24以转动轴26为中心转动。由此,第一把持部11a及第二把持部11b的指部22相互分离。并且,如图5所示,若向与图4所示的方向相反的方向驱动把持用促动器17,则第一把持部11a及第二把持部11b向接近指部22的方向转动。然后,第一把持部11a及第二把持部11b的指部22与物品100的侧面部接触。由此,能够由第一把持部11a及第二把持部11b把持物品100。
60.并且,通过调整臂支撑部23相对于狭缝24a的安装位置,从而能够调整第一把持部11a的指部22与第二把持部11b的指部22的间隔。由此,能够根据物品100的大小来改变第一把持部11a及第二把持部11b的指部22的间隔。
61.此外,虽然对使臂支撑部23沿设于转动部24的狭缝24a滑动来手动地调整臂支撑部23的安装位置的例子进行了说明,但并不限定于此。例如,也可以经由线性促动器、马达等能够相对于转动部24移动地将臂支撑部23支撑于转动部24,控制装置根据物品100的大小自动地变更臂支撑部23的位置,来调整指部22的间隔。并且,也可以准备不同尺寸的多个臂支撑部23,根据物品100的大小来更换臂支撑部23。
62.并且,在本例的机器人手1中,对由把持用促动器17使第一把持部11a和第二把持部11b转动来把持物品100的例子进行了说明,但并不限定于此,能够应用其它各种把持部驱动机构。例如,作为把持部驱动机构,也可以应用使第一把持部11a和第二把持部11b平移运动并使指部22接近或远离的驱动机构。因此,作为表示驱动部的把持用促动器17,并不限定于旋转促动器,例如也可以应用线性促动器、气压式的负压产生装置等其它各种驱动部。
63.并且,作为把持部11a、11b,对在臂21的前端部设有与物品100接触的指部22的例子进行了说明,但并不限定于此。例如,可以由具有柔软性的部件构成臂21自身,由臂21把持物品100,也可以由多个连杆部件构成臂21。把持物品100的把持部11a、11b的结构能够应用其它各种结构。
64.另外,设于机器人手1的把持部的数量并不限定于两个,也可以设置三个以上的把持部。
65.2.拣选系统的动作例
66.接下来,参照图6a至图8d对具有上述结构的拣选系统80的动作例进行说明。
67.图6a至图7c是示出拣选系统80的动作例的说明图。
68.如图6a所示,首先,控制装置基于摄像头85(参照图1)所拍摄到的信息,控制搬运机器人81(参照图1),使机器人手1移动至要把持的物品的上方。接着,控制装置使机器人手1中的把持驱动机构16a、16b的把持用促动器17驱动。由此,如图6b所示,第一把持部11a及第二把持部11b向彼此分离的方向打开。然后,若第一把持部11a及第二把持部11b打开至预定的角度,则控制装置使把持驱动机构16a、16b的电磁制动器18动作。由此,在打开的状态下锁定第一把持部11a及第二把持部11b。
69.接着,控制装置驱动伸缩臂15的摆动用促动器37,将摆动部32相对于伸缩部33的位置锁定在初始位置。并且,如图6c所示,控制装置使伸缩臂15的缸筒驱动来使伸缩部33朝向物品100伸长。此外,图6b所示的把持部11a、11b的动作和图6c所示的伸缩臂15的动作也可以同时进行。
70.接着,控制装置控制搬运机器人81,使机器人手1接近物品100。然后,控制装置驱动搬运机器人81直至机器人手1的吸附垫14与物品100接触。如图6d所示,若吸附垫14与物品100接触,则控制装置驱动负压产生装置。由此,物品100被吸附至吸附垫14。
71.并且,为了用吸附垫14来可靠地吸附物品100,将吸附垫14按压至物品100。此时,摆动用促动器37进行驱动,将摆动部32锁定在初始位置。因此,在将吸附垫14按压至物品100时,能够防止摆动部32摆动。而且,若用吸盘14吸附物品100,则控制装置断开摆动用促动器37的驱动,解除摆动部32的锁定。
72.接着,如图7a所示,控制装置驱动伸缩臂15的缸筒,来使伸缩部33收缩。并且,如图7b所示,控制装置控制搬运机器人81,使物品100与机器人手1一起上升。由此,从收纳瓦楞纸箱200拉出物品100。其中,图7a所示的伸缩部33的收缩动作和图7b所示的由搬运机器人
81进行的机器人手1的上升动作也可以同时进行。或者,也可以在由搬运机器人81完成机器人手1的上升动作之后,进行伸缩部33的收缩动作。
73.接着,控制装置使把持驱动机构16a、16b的电磁制动器18断开,驱动把持用促动器17。然后,把持部11a、11b向彼此接近的方向转动,指部22与物品100接触。由此,把持部11a、11b以第一力来把持物品100。此外,把持物品100的第一力设定为物品100不会变形的程度的力。
74.若从把持用促动器17驱动起经过预定时间,则控制装置停止把持用促动器17的驱动,并且驱动电磁制动器18。由此,在把持有物品100的状态下锁定把持部11a、11b。其结果,物品100由机器人手1的把持部11a、11b以第二力把持。
75.这样,以作为较弱的力的第一力来开始物品100的把持动作,在经过预定时间后,以第二力来锁定物品100,从而能够以简单的结构在不会使物品100破损的情况下可靠地由把持部11a、11b把持物品100。其结果,能够防止物品100因在搬运物品100时产生的离心力、惯性力从机器人手1脱落的情况。
76.而且,不进行如使用了压敏传感器的反馈控制之类繁杂的控制,仅以第一力和第二力的两个阶段控制把持驱动机构16a、16b。由此,能够容易地进行使把持部11a、11b可动的把持驱动机构16a、16b的控制。
77.并且,从第一力切换为驱动作为锁定机构的电磁制动器18的第二力的时机亦即预定时间也可以基于物品100的大小来变更。因此,例如,也可以基于摄像头85拍摄物品100而得到的图像信息、预先输入到控制装置的物品100的信息来确定物品100的大小,控制装置根据所确定到的物品100的大小来设定从第一力切换为第二力的时机亦即预定时间。
78.此外,如上所述,第一把持部11a和第二把持部11b闭合时的指部22的间隔能够根据臂支撑部23相对于转动部24的位置来调整。因此,也可以通过预先根据物品100的大小来调整指部22的间隔,在把持部11a、11b完全关闭时,从第一力切换为第二力,即驱动电磁制动器18。由此,能够容易地进行把持驱动机构16a、16b的控制。
79.并且,在上述的例子中,对在经过预定时间后驱动电磁制动器18来锁定把持部11a、11b的例子进行了说明,但并不限定于此。例如,也可以是,控制装置在检测到达到了预先设定的把持力(第二力)时,驱动电磁制动器18,以第二力来锁定把持部11a、11b。由此,不获得与物品100的大小相关的信息也能够控制把持驱动机构16a、16b。
80.作为把持力的检测,也可以使用在把持用促动器17中流动的电流值。并且,在使用气压式的负压产生装置作为把持驱动机构16a、16b的情况下,也可以通过检测从负压产生装置输出的空气的压力来检测把持部11a、11b的把持力。或者,也可以设置在把持部11a、11b闭合的状态下进行动作的开关,在开关动作了时,控制把持驱动机构16a、16b以便以第二力来把持物品100。
81.接下来,参照图8a至图8d对拣选系统80的另一动作例进行说明。
82.图8a至图8d是示出拣选系统80的另一动作例的说明图。
83.如图8a所示,要吸附把持的物品100有时在收纳瓦楞纸箱200内倾斜。为了用吸附垫14可靠地吸附物品100,优选将吸附垫14垂直地按压至物品100的要吸附的面。因此,如图8a所示,首先,控制装置控制把持驱动机构16a、16b,打开把持部11a、11b。然后,控制装置使电磁制动器18动作来在打开的状态下锁定把持部11a、11b。
84.接着,如图8b所示,控制装置基于来自摄像头85的图像信息,驱动摆动用促动器37,使摆动部32摆动,直至设于摆动部32的吸附垫14的方向成为与要吸附的物品100的吸附面垂直的方向。然后,控制装置控制摆动用促动器37,在吸附垫14的方向成为与物品100的吸附面垂直的方向的位置锁定摆动部32。
85.接着,如图8c所示,控制装置控制搬运机器人81,使机器人手1接近物品100。然后,控制装置驱动搬运机器人81直至机器人手1的吸附垫14与物品100接触。并且,控制装置也可以驱动伸缩臂15的缸筒,使伸缩部33伸长。
86.接着,控制装置控制搬运机器人81或机器人手1,将吸附垫14按压至物品100的吸附面。其中,由于摆动部32的位置由摆动用促动器37锁定,所以能够将吸附垫14可靠且垂直地按压至物品100的吸附面。然后,控制装置驱动未图示的负压产生装置,用吸附垫14吸附物品100。
87.若吸附垫14对物品100的吸附完成,则控制装置断开摆动用促动器37的驱动,解除摆动部32的锁定。然后,如图8d所示,控制装置使伸缩臂15的伸缩部33收缩,并且控制搬运机器人81,使物品100与机器人手1一起上升。由于摆动部32的锁定被解除,所以摆动部32及物品100因自重而以摆动轴34为中心转动。因此,摆动部32以及吸附垫14所吸附的物品100朝向机器人手1的铅垂方向的下方。之后,控制装置控制把持驱动机构16a、16b,利用把持部11a、11b来把持物品100。其中,把持物品100的动作与图6a至图7c所示的动作相同,从而省略其说明。
88.这样,根据本例的机器人手1,由于设有吸附垫14的伸缩臂15的前端部根据物品100所放置的状态来摆动,所以能够可靠地吸附并把持物品100。
89.此外,并不限定于上述且附图所示的实施方式,在不脱离权利要求书所记载的发明的主旨的范围内能够实施各种变形。
90.在上述的实施方式例中,对通过使作为锁定机构的电磁制动器18动作来生成第二力的例子进行了说明,但并不限定于此。例如,也可以通过提高把持用促动器17的输出,从第一力变化为第二力。
91.此外,在本说明书中,使用了“平行”及“正交”等词语,但这些词语并不仅意味着严格的“平行”及“正交”,包括“平行”及“正交”,另外也可以是能够发挥其功能的范围内的“大致平行”、“大致正交”的状态。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。