一种镜头模组、摄像模组及终端
1.本技术要求在2020年08月31日提交中国专利局、申请号为202010901470.0、申请名称为“一种镜头模组、摄像模组及终端”的中国专利申请的优先权,其全部内容通过引用结合在本技术中。
技术领域
2.本技术涉及到摄像头技术领域,尤其涉及到一种镜头模组、摄像模组及终端。
背景技术:
3.长焦镜头对于拍摄远景有很大的帮助,例如演唱会、风景照,通过传感器上的长焦镜头,我们自己不需要机械移动,就可以拍摄远处的场景。在同样的拍摄距离内,拍同样的景物可以就某个局部拍得比普通镜头大且清晰。长焦镜头让手机影像功能丰富化、成像优质化的同时极大地拓展了用户的使用场景和创作空间,帮助用户突破空间、物理限制拉近与世界的距离,带来更多玩味的操作,为生活带来更多便利以及乐趣。
4.现有技术中的长焦镜头采用光学变焦,光学变焦是依靠光学镜头来实现变焦,它的变焦方式主要取决于镜头的焦距,通过相机镜片移动来放大和缩小景物,这就是所谓的光学变焦。超远距离的变焦成像其实有一定的拍摄难度。在长焦镜头应用在手机上时,受限于手机机身设计原因,摄像头采用多片小尺寸的镜片组成。另外,随着手机的薄型化发展,手机内部空间的厚度很薄,没有堆叠长焦镜头的物理空间,因此现有技术中手机上应用的长焦镜头已经无法适应手机的需求。
技术实现要素:
5.本技术提供了一种镜头模组、摄像模组及终端,降低镜头模组的尺寸,提高镜头模组的适应性。
6.第一方面,提供了一种镜头模组,该镜头模组包括第一镜头和第二镜头,第一镜头和第二镜头沿光轴排列,且第一镜头靠近物侧,第二镜头靠近像侧。其中,第一镜头用于实现长焦,第二镜头用于实现对焦。在具体设置时,第一镜头包括第一透镜,第一透镜的入光侧表面包括透光区和第一反射区;所述第一透镜的出光侧表面包括第二反射区和出光区;其中,所述第一反射区和第二反射区用于折返从透光区射入到所述第一透镜内的光线。第二镜头包括至少一个第二透镜,所述至少一个第二透镜为调焦透镜。在设置时,至少一个第二透镜与所述第一透镜沿所述光轴排列。在上述技术方案中,通过第一透镜实现折返光路,从而实现长焦镜头的效果,另外,由于光路进行折返,从而可采用较小尺寸的直立式镜头模组,降低了摄像模组的尺寸,使得摄像模组可适应终端的薄型化发展。
7.在一个具体的可实施方案中,所述第一反射区位于所述入光侧表面的中心位置,所述透光区环绕所述第一反射区;所述出光区位于所述出光侧表面的中心位置,所述第二反射区环绕所述出光区设置。通过第一反射区和出光区相对设置,透光区与第二反射区相对设置,从而使得光线可在第一透镜中折返。
8.在一个具体的可实施方案中,所述透光区为平面;所述第一反射区为内凹的球形区。通过内凹的球形区方便光线折射到出光区。
9.在一个具体的可实施方案中,所述出光侧表面为外凸的球形面。采用球形面方便第二反射区将光线反射到第一反射区,同时也方便出光侧对光线进行汇聚。
10.在一个具体的可实施方案中,所述第一反射区和所述第二反射区分别贴附有反射膜层。通过反射膜层提高了反射效果。
11.在一个具体的可实施方案中,所述第一镜头还包括第一镜筒,所述第一透镜固定在所述第一镜筒内;所述第二镜头还包括第二镜筒,所述第二透镜的个数为多个,所述多个第二透镜沿所述光轴排列并固定在所述第二镜筒内。通过分别设置的镜筒支撑透镜,另外,透镜可根据需要分别设置在不同的镜筒内。
12.在一个具体的可实施方案中,所述第一镜头还包括第一镜筒,所述第一透镜固定在所述第一镜筒内,所述第一镜头还包括固定在第一镜筒内的至少一个第三透镜,所述至少一个第三透镜为调焦透镜;所述第二镜头还包括第二镜筒,所述第二透镜的个数为一个,且所述一个第二透镜固定在所述第二镜筒内。通过分别设置的镜筒支撑透镜,另外,透镜可根据需要分别设置在不同的镜筒内。
13.在一个具体的可实施方案中,还包括支架,所述第一镜头和所述第二镜头中,至少一个镜头可相对所述支架沿所述光轴方向滑动。通过支架支撑第一镜头和第二镜头。
14.在一个具体的可实施方案中,所述第二镜头与所述支架固定连接,所述第一镜头通过第一弹性件与所述支架连接。通过一个镜头固定,另一个镜头滑动的方式实现调焦。
15.在一个具体的可实施方案中,所述第一镜头通过第一弹性件与所述支架连接;所述第二镜头通过第二弹性件与所述支架连接。通过两个镜头可分别与支架滑动的方式实现调焦。
16.在一个具体的可实施方案中,所述支架内设置有沿所述光轴方向延伸的轴;所述第一镜头和所述第二镜头分别滑动装配在所述轴上。通过两个镜头可分别与支架滑动的方式实现调焦。
17.在一个具体的可实施方案中,还包括驱动机构,所述驱动机构用于驱动第一镜头或第二镜头运动,实现调焦。
18.在一个具体的可实施方案中,驱动机构可为对焦af(auto focus,自动对焦)驱动马达,采用不同的驱动机构驱动镜头模组对焦。
19.第二方面,提供了一种摄像模组,该摄像模组包括底座以及与所述底座连接的上述任一项所述的镜头模组。在上述技术方案中,通过第一透镜实现折返光路,从而实现长焦镜头的效果,另外,由于光路进行折返,从而可采用较小尺寸的直立式镜头模组,降低了摄像模组的尺寸,使得摄像模组可适应终端的薄型化发展。
20.在一个具体的可实施方案中,所述底座通过所述第三弹性件与所述支架连接;所述摄像模组还包括补偿所述镜头模组抖动的防抖马达。通过第三弹性件用于防抖马达的配合改摄像模组的防抖效果。
21.在一个具体的可实施方案中,第三弹性件为弹簧或者悬丝。均可支撑支架。
22.第三方面,提供了一种终端,该终端包括壳体以及设置子所述壳体的上述任一项所述的摄像模组。在上述技术方案中,通过第一透镜实现折返光路,从而实现长焦镜头的效
果,另外,由于光路进行折返,从而可采用较小尺寸的直立式镜头模组,降低了摄像模组的尺寸,使得摄像模组可适应终端的薄型化发展。
附图说明
23.图1为摄像模组的应用场景示意图;
24.图2为本技术实施例提供的镜头模组的分解示意图;
25.图3为本技术实施例提供的第一镜头的结构示意图;
26.图4为图3中的a-a处的剖视图;
27.图5为第一透镜的结构示意图;
28.图6为本技术实施例提供的第二镜头的结构示意图;
29.图7为图6中b-b处的剖视图;
30.图8为第一镜头和第二镜头配合的示意图;
31.图9为本技术实施例提供的镜头模组的结构应用示意图;
32.图10为本技术实施例提供的另一镜头模组的结构示意图;
33.图11为本技术实施例提供的另一种第一镜头的剖视图;
34.图12为本技术实施例提供的另一种第二镜头的剖视图;
35.图13为本技术实施例提供的镜头模组的结构应用示意图;
36.图14为本技术实施例提供的一种摄像模组的结构示意图;
37.图15为本技术实施例提供的摄像模组的仿真结果示意图;
38.图16为本技术实施例提供的另一种摄像模组的结构示意图;
39.图17为本技术实施例提供的另一种摄像模组的结构示意图;
40.图18为本技术实施例提供的另一种摄像模组的结构示意图。
具体实施方式
41.下面将结合附图对本技术实施例作进一步描述。
42.为方便理解本技术实施例提供的镜头模组,首先说明其应用场景,本技术实施例提供的镜头模组应用于摄像模组中,镜头模组用于将光线汇聚到摄像模组的图像信号处理器上,实现对物体进行拍照。上述摄像模组应用于终端中,如笔记本电脑、平板电脑或者手机等常见的终端。如图1所示的摄像模组2固定在手机上的结构示意图,摄像模组2固定在手机的壳体1内,摄像模组2的镜头模组外露在壳体1外。在使用时,该摄像模组2可用于实现手机的摄像或拍照功能。但由于终端的逐渐薄型化发展,限制了摄像模组2的尺寸不易过大,现有技术中的长焦镜头已经无法适应手机的薄型化发展。为此本技术实施例提供了一种降低摄像模组2尺寸的镜头模组,下面结合具体的附图对其结构进行详细说明。
43.如图2所示,图2示出了本技术实施例提供的镜头模组100的分解示意图。本技术实施例提供的镜头模组100应用于直立式摄像模组中。
44.镜头模组100主要包括第一镜头10、第二镜头20以及用于支撑第一镜头10和第二镜头20的支架30。第一镜头10和第二镜头20沿光轴排列,且第一镜头10靠近物侧,第二镜头20靠近像侧。应理解上述支架30为支撑第一镜头10和第二镜头20的一种具体的实现形式,本技术实施例提供的镜头模组100还可采用其他的结构来支撑第一镜头10和第二镜头20,
如壳体或者其他相似的结构,在此不再一一列举。
45.在摄像时,光线依次经过第一镜头10和第二镜头20,且通过第一镜头10可实现对光线的折返,以实现镜头的长焦效果;通过第二镜头20对光线进行对焦,以实现镜头模组100的对焦效果。
46.图3示出了第一镜头10的结构示意图,第一镜头10包括第一透镜12、第一镜筒11及盖板13。其中,第一镜筒11作为第一透镜12的支撑结构,第一透镜12可固定在第一镜筒11内。另外,第一镜筒11的两端开口,以便于光线可穿透第一镜筒11。盖板13盖合在第一镜筒11的一端开口,并与第一镜筒11的端部固定连接,以与第一镜筒11配合将第一透镜12限定在第一镜筒11内。
47.作为一个可选的方案,第一镜筒11可采用塑胶或其他成型材料做成的结构器件,通过第一镜筒11可支撑和固定第一透镜12,减少第一透镜12的应力,保证第一透镜12的位置和定位精度。
48.作为一个可选的方案,第一镜筒11采用圆筒形结构,以降低第一镜头10占用的空间。应理解,图3中示例的第一镜筒11仅为一个示例,在具体设置第一镜筒11时,还可采用其他的形状,如椭圆筒、方形筒等不同的形状的结构。
49.图4示出了图3中的a-a处的剖视图。第一镜筒11内的腔体为阶梯腔体。为方便描述,定义了第一镜筒11的两个端部,分别为第一端和第二端,其中,第一端为靠近第一镜筒11靠近物侧的一端,第二端为第一镜筒11靠近像侧的一端(即靠近第二镜头的一端)。第一镜筒11内的内侧壁沿第一端指向第二端的方向,呈阶梯变化,且尺寸逐渐降低,从而形成阶梯变化的腔体。
50.第一透镜12在装配时,固定在腔体中靠近第一端的位置。第一透镜12的侧壁与第一镜筒11的侧壁固定连接。盖板13盖合在第一镜筒11的第一端,并与第一镜筒11的内侧壁上的阶梯面一起配合,限位第一透镜12。应理解,盖板13上设置有与第一透镜12的入光面配合的通孔,以便于光线可照射到第一透镜12。另外盖板13遮挡的第一透镜12的区域为第一透镜12的非功能区,不影响第一透镜12的功能。
51.作为一个可选的方案,第一透镜12可通过过盈配合与第一镜筒11固定连接;或者第一透镜12可以采用胶水、树脂或其他粘接材料固定粘接在第一镜筒11内,也可以采用第一透镜12在注塑成型模腔内二次成型的方式直接成型固定。
52.作为一个可选的方案,第一镜筒11的外侧壁也呈阶梯变化,且阶梯变化的趋势与第一镜筒11的内侧壁相同。
53.参考图5,图5示出了第一透镜12的结构示意图。第一透镜12采用圆形的透镜,但本技术实施例提供的第一透镜12不仅限于图5所示的圆形,还可为椭圆形、矩形或者其他形状的透镜。
54.第一透镜12具有相对的两个表面,分别为入光侧表面121和出光侧表面122。入光侧表面121为第一透镜12靠近物侧的表面,出光侧表面122为第一透镜12靠近像侧的表面。在使用时,光线可通过入光侧表面121射入到第一透镜12中,并通过出光侧表面122从第一透镜12中射出。
55.入光侧表面121和出光侧表面122按照功能分别划分为不同的区域。示例性的,入光侧表面121划分为透光区1211和第一反射区1212;出光侧表面122划分为出光区1221和第
二反射区1222。其中,透光区1211和出光区1221分别为光线射入和射出第一透镜12的区域,第一反射区1212和第二反射区1222为用于折返在第一透镜12内传播的光线的路径的区域。
56.在具体设置入光侧表面121和出光侧表面122的不同区域时,作为一个可选的方案,第一反射区1212位于入光侧表面121的中心位置,透光区1211环绕第一反射区1212。出光区1221位于出光侧表面122的中心位置,第二反射区1222环绕出光区1221设置。从而使得沿光轴方向,透光区1211与第二反射区1222相对设置,出光区1221与第一反射区1212相对设置。另外,通过在光路的中心设置一个反射面(第一反射区1212),射入第一透镜12的光线成环状,使得镜头模组在拍照离焦时弥散斑成环状,最终成像质量好,另外不会形成色差,可以实现优良的成像画质。
57.参考图5中带箭头的直线,带箭头的直线表示光线的路径。光线在照射到入光侧表面121时,光线仅从透光区1211射入到第一透镜12中,第一反射区1212为非透光区,无法透过光线。射入到第一透镜12内的光线经第二反射区1222反射到第一反射区1212,再通过第一反射区1212反射到出光区1221,并最终从出光区1221射出。透射后光经过折射进入空气层,沿光轴方向进入第二镜头。由图5中所示的光线路径可看出,光线在第一透镜12中传播时,利用光线折反的原理,使光线通过第一透镜12时,不是直接到达图像信号处理器,而是经过两次反射后才到达图像信号处理器。从而可使得第一镜头的长度缩短,最大限度得缩小了体积、重量,同时也降低了成本。
58.在具体形成第一反射区1212和第二反射区1222时,可通过在第一反射区1212和第二反射区1222分别贴附反射膜层。反射膜层的反射面朝向透镜内,以便于对第一透镜12内的光线进行反射。应理解,上述贴附反射膜层仅为形成第一反射区1212和第二反射区1222的一个具体示例,在本技术实施例中,还可采用其他的方式形成反射区,如喷涂反射材料形成第一反射区1212和第二反射区1222。此外,第一透镜12采用无色散的反射面(第一反射区1212和第二反射区1222)代替有色散的折射面,能够更好的控制色散。
59.作为一个可选的方案,透光区1211为平面,以方便光线的入射。应理解透光区1211还可采用其他的表面。示例性的,透光区1211还可采用外凸的弧形面,或者内凹的弧形面,或者其他类型的面,只需从透光区1211入射到第一透镜12内的光线可传播到第二反射区1222即可。
60.作为一个可选的方案,第一反射区1212为入光侧表面121的内凹的球形区。如图5中所示,第一反射区1212为凹陷在第一透镜12内的球形区。在采用球形区时,从第二反射区1222反射到第一反射区1212的光线可具有不同的入射角,且光线可通过第一反射区1212的球形区汇聚到出光区1221。应理解,第一反射区1212不仅限于图5中所示的球形区,还可采用其他的可汇聚光线的面型。如第一反射区1212还可为锥形面、椭圆面或者抛物面等不同的面型,同样可实现对光线的汇聚效果。
61.作为一个可选的方案,出光侧表面122为外凸的球形面。在出光侧表面122采用外凸的球形面时,第二反射区1222用于反射光线的表面为一个内凹的面,且该内凹的面朝向第一反射区1212,可将透光区1211照射到第二反射区1222的光线反射到第一反射区1212。另外,出光区1221为一个球形面,也方便将第一反射区1212反射的光线再次汇聚。应理解,上述出光侧表面122采用球形面为本技术的一个具体示例,出光侧表面122还可采用其他面型。示例性的,出光侧表面122还可采用锥形面,第二反射区1222和出光区1221均为平面结
构。或者出光侧表面122还可采用组合面,如第二反射区1222为环形的平面,且平面相对光轴倾斜,以将光线反射到第一反射区1212;出光区1221采用球形面。
62.应理解,在本技术实施例中,并不具体限定第一反射区1212和透光区1211的比例,以及第二反射区1222和出光区1221的比例。在具体设置上述区域时,其比例关系只需可实现图5所示光线路径即可。
63.如图6所示,图6示出了本技术实施例提供的第二镜头20的结构示意图。第二镜头20的作用是对第一镜头汇聚过来的成像光线进一步汇聚,调整成像焦距,减少色差、畸变和像差,对成像质量进行调整和改善,减小各个视场下的视场弯曲,保证图像信号处理器上成像质量。下面结合图6详细说明第二镜头20的结构。
64.第二镜头20包括第二透镜22及第二镜筒21。其中,第二镜筒21作为第二透镜22的支撑结构,在装配时,第二透镜22可固定在第二镜筒21内。另外,第二镜筒21的两端开口,以便于光线可穿透第二镜筒21内的腔体。
65.第二镜筒21的材质可以采用塑胶或其他易成型材料,在本技术实施例中不做具体限定。
66.第二透镜22的材料为光学白料塑胶材料,或者光学玻璃材料等常见的透镜材料,在本技术实施例中不做具体限定。
67.参考图7,图7示出了图6中b-b处的剖视图。第二镜筒21内的腔体为阶梯腔体。为方便描述,定义了第二镜筒21的两个端部,分别为第三端和第四端,其中,第三端为靠近第二镜筒21靠近物侧的一端,第四端为第二镜筒21靠近像侧的一端(即靠近图像信号处理器的一端)。第二镜筒21内的内侧壁沿第三端指向第四端的方向,呈阶梯变化,且尺寸逐渐增大,从而形成阶梯变化的腔体。
68.作为一个可选的方案,第二透镜22可通过过盈配合与第二镜筒21的侧壁固定连接;或者第二透镜22的侧壁通过粘接胶与第二镜筒21的侧壁粘接连接。
69.作为一个可选的方案,第二透镜22的个数为四个,且四个第二透镜22沿光轴排布在第二镜筒21中,四个透镜可根据需要选择球面镜或者非球面镜。在具体设置时,四个透镜只需可实现调焦即可,对于每个透镜的具体结构以及尺寸在本技术实施例中不做具体限定。应理解,图7中所示的四个第二透镜22仅为一个具体的示例,本技术实施例提供的第二透镜22的个数不仅限于图7中所示的四个,还可选用其他个数的第二透镜22,如两个、三个、五个、六个等任意个数的透镜。只需要各个第二透镜22在组合后,可实现调整成像焦距,减少色差、畸变和像差,对成像质量进行调整和改善,减小各个视场下的视场弯曲的效果即可。
70.作为一个可选的方案,第二镜头20还包括垫片23,该垫片23用于调整第二透镜22之间的间距。垫片23可设置在不同的第二透镜22之间,从而可根据实际的需要调整垫片23的厚度,在此不做具体限定。
71.作为一个可选的方案,第二镜筒21采用圆筒形结构,以降低第二镜头20占用的空间。应理解,图7中示例的镜筒仅为一个示例,在具体设置第二镜筒21时,还可采用其他的形状,如椭圆筒、方形筒等不同的形状的结构。
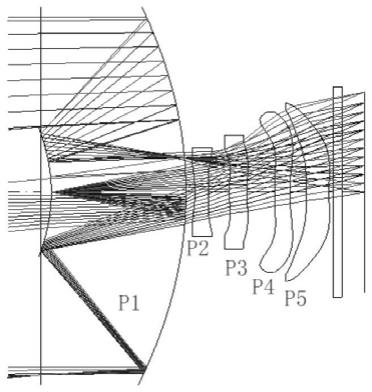
72.参考图8,图8示出了第一镜头和第二镜头配合的示意图。在图8中仅示出了第一透镜p1、第二透镜p2、第二透镜p3、第二透镜p4及第二透镜p5、滤光片(图中未标示)以及图像
信号处理器(图中未标示)。其中,第一镜头10包括一个第一透镜p1,第二镜头20包括四个第二透镜p2、p3、p4、p5。光线在传播时,从第一透镜p1的入光侧表面入射,并经第二反射区和第一反射区反射后,从第一透镜p1的出光侧表面射出,射出后的光线依次镜头第二透镜p2、第二透镜p3、第二透镜p4及第二透镜p5,并经过上述第二透镜调整成像焦距、减少色差、畸变和像差,对成像质量进行调整和改善,减小各个视场下的视场弯曲。之后光线经过滤光片后在图像信号处理器上成像。由图8可看出,在第一镜头采用可折返光线路径的第一透镜时,镜头模组的长度可以缩短,另外,最大限度得缩小了体积、重量,同时也降低了成本。
73.参考图9,图9示出了本技术实施例提供的镜头模组100的结构应用示意图,图9中的部分部件的标号可参考图2中的相同部件的标号。在镜头模组100应用到摄像模组中时,镜头模组100固定在摄像模组内。如图9所示,镜头模组100的支架30位于摄像模组的壳体200内,摄像模组还包括电路板300,设置在电路板300上的图像信号处理器400,图像信号处理器400、第二镜头20和第一镜头10沿光轴排列。在拍摄时,光线可依次穿过第一透镜、第二透镜后照射到图像信号处理器400,并通过图像信号处理器400将光信号转换成电信号。
74.由图9可看出,在本技术实施例提供的镜头模组100采用第一透镜折返光线后,使得光路折返,从而使得直立式镜头模组100也可应用于摄像模组中,并可极大的降低摄像模组的尺寸。
75.参考图10,图10示出了本技术实施例提供的另一镜头模组100的结构示意图,图10中的部分部件的标号可参考图2中的相同部件的标号。
76.图10所示的镜头模组100包括支架30、第一镜头10和第二镜头20,图10中的部分部件可参考图2中的相同标号。图10所示的镜头模组100与图2中所示的第一镜头10及第二镜头20的区别在于透镜的设置方式。
77.图11示出了第一镜头10的剖视图。第一镜头10包括第一镜筒11以及第一透镜12,第一镜筒11和第一透镜12可参考上述的相应描述。第一镜头10还包括第一镜筒11,第一透镜12固定在第一镜筒11内,第一镜头10还包括至少一个第三透镜14,第一透镜12、至少一个第三透镜14沿光轴排列,且至少一个第三透镜14位于第一透镜12的像侧。上至少一个第三透镜14为调焦透镜,在图11中示例出第三透镜14的个数为三个,但本技术实施例中的第三透镜14的个数在此不做具体限定。
78.作为一个可选的方案,第一镜头10还包括垫片,通过垫片可调整第三透镜14之间的间距,垫片的厚度可根据实际需要设定。
79.图12示出了第二镜头20的剖视图。第二镜头20包括第二镜筒21以及第二透镜22。第二透镜22的个数为一个,且一个第二透镜22固定在第二镜筒21内。上述的第三透镜和第二透镜22共同作用组成调整成像焦距,减少色差、畸变和像差,对成像质量进行调整和改善,减小各个视场下的视场弯曲,保证图像信号处理器上成像质量的透镜组。上述四个透镜可根据需要选择球面镜或者非球面镜。在具体设置时,四个透镜只需可实现调焦即可,对于每个透镜的具体结构以及尺寸在本技术实施例中不做具体限定。
80.参考图13,图13示出了本技术实施例提供的镜头模组100的结构应用示意图,图13中的部分部件的标号可参考图2中的相同部件的标号。在镜头模组100应用到摄像模组中时,镜头模组100固定在摄像模组内。如图13所示,镜头模组100的支架30位于摄像模组的壳体200内,摄像模组还包括电路板300,设置在电路板300上的图像信号处理器400,图像信号
处理器400、第二镜头20和第一镜头10沿光轴排列。在拍摄时,光线可依次穿过第一透镜、第二透镜后照射到图像信号处理器400,并通过图像信号处理器400将光信号转换成电信号。
81.由图13可看出,在本技术实施例提供的镜头模组采用第一透镜折返光线后,镜头模组的长度可以缩短,另外,最大限度得缩小了体积、重量,同时也降低了成本。
82.参考图14,图14示出了本技术实施例提供的一种摄像模组的结构示意图。图14中的部分标号可参考图13中的相同标号。摄像模组包括底座800以及与底座800连接的上述任一项的镜头模组100。
83.第二镜头20与支架30固定连接,第一镜头10通过第一弹性件600与支架30连接。第一镜头10和第二镜头20套装在支架30内,第一镜头10通过两个或两个以上的第一弹性件600与支架30连接,第二镜头20与支架30固定连接。在上述结构中,通过第一弹性件600发生的弹性形变可使得第一透镜沿光轴运动,从而调整第一镜头10与第二镜头20的相对位置,进而实现调焦。
84.在具体驱动第一镜头10运动时,可选择不同的驱动机构实现。该驱动机构用于驱动第一镜头10运动,以实现调焦。示例性的,驱动机构可为af驱动马达。
85.为方便面描述将第一镜头10命名为g1镜头,第二镜头20命名为g2镜头。af驱动马达的作用是通电马达后移动g1镜头或g2镜头来实现的对焦,在图像信号处理器上清晰成像。在图14中仅示例出g1镜头可移动,本技术实施例提供的摄像模组还可采用g1镜头固定,g2镜头通过弹性件与支架30连接。即g1镜头和g2镜头中至少一个镜头可移动即可实现调焦。
86.在驱动时,af驱动马达根据霍尔传感器信号、驱动芯片或陀螺仪信号来计算镜头移动的距离,驱动芯片会根据一定的算法来计算g1镜头和g2镜头的相对位置,实现清晰成像。作为一个可选的方案,af驱动马达可以采用音圈马达、压电马达或者形状记忆合金丝来实现。应理解,根据霍尔传感器信号、驱动ic或陀螺仪信号来驱动第一镜头10的方式为比较常见的驱动方式,在此不再赘述。
87.本技术实施例提供的镜头模组100还具有防抖功能。如图14所示,底座800通过第三弹性件500与支架30连接,摄像模组还包括补偿镜头模组100抖动的防抖马达700,通过第三弹性件500配合防抖马达700的配合改摄像模组的防抖效果。其中第三弹性件500可为弹簧或者悬丝,并通过第三弹性件500使得镜头模组100形成一个悬浮的弹性结构。应理解在图14中虽然示出了两个第三弹性件500,但是在本技术实施例中,可设置多个第三弹性件500,如两个、三个、四个等不同个数的第三弹性件500,只需可支撑支架30即可。
88.防抖马达700可采用ois(optical image stabilization,光学影像防抖)马达,ois马达是通过支架30底部的磁铁(图中未示出)产生的磁场和底座800上的线圈coil通电产生的洛伦兹力推动第三弹性件500来产生位移,实现整体镜头组移动防抖。当摄像模组内的陀螺仪侦测到镜头微小的移动后,并且会将信号传至微处理器,微处理器根据抖动方向及位移,立即计算需要补偿的位移量,然后通过ois马达带动g1镜头和g2镜头移动来补偿偏移量,从而有效的克服因相机的振动产生的影像模糊。ois马达可以是音圈马达、压电马达或者形状记忆合金的形式,来实现防抖位移补偿。上述防抖马达700的结构以及工作原理为比较常见的驱动方式,在此不再赘述。
89.长焦拍摄的摄像模组要求较高的对焦位置精度,g1镜头的驱动马达需要用霍尔传
感器来感测镜头位置,实施闭环控制,同时需要利用模组上的陀螺仪信号来感测运动状态,经过软件算法计算来补偿抖动量,实现ois防抖。
90.通过上述描述可看出,该摄像模组利用g1镜头轴向移动进行自动对焦(auto focus,af),实现良好的近物距(如1.0米到无穷远距离的成像)成像效果。g2镜头和支架30固定,不需要做光轴方向的移动,拍摄时g1镜头在af马达的驱动下实现对焦成像,摄像模组结构相对简单,控制方式容易实现,成本上面具有优势。
91.镜头模组通过2个镜头组合搭配实现对焦,可以在手机模组上实现5倍以上的长焦拍摄效果。为方便理解本技术实施例提供的摄像模组的效果,对其进行仿真,仿真结果如图15所示,由图15可看出,采用图14所示的摄像模组进行仿真时,成像效果mtf值0.8视场已经达到55,视场弯曲明显改善。
92.另外,ois马达和af驱动马达可分别控制,提高了控制效果。
93.参考图16,图16示出了另一种摄像模组的结构示意图。图16中的部分部件可参考图14中的相同标号。在图16中所示的摄像模组中,第一镜头10和第二镜头20均采用悬浮的方式与支架30连接。具体的,第一镜头10通过第一弹性件600与支架30连接;第二镜头20通过第二弹性件900与支架30连接。
94.为方便面描述将第一镜头10命名为g1镜头,第二镜头20命名为g2镜头。本实施例是通过弹性件分别把g1镜头和g2镜头悬挂在支架30上,使得g1镜头和g2镜头都可以移动,拍摄远处的景物时通过算法计算出g1镜头和g2镜头的最佳搭配距离来成像对焦,达成更高质量的成像效果,同样可以降低不同视场下的像场弯曲,提高画面成像质量的对焦方式。在这种架构下g1镜头和g2镜头是由单独的音圈马达或者其他马达(形状记忆合金丝或者压电马达)驱动,沿着光轴运动。
95.ois马达是通过支架30底部的磁铁产生的磁场和底座上的线圈coil通电产生的洛伦兹力推动4根或多跟弹簧、悬丝来产生位移,实现整体镜头组移动防抖。
96.g2镜头和g1镜头都用马达推动产生位移,g1镜头和g2镜头用2个独立的控制马达闭环控制,拍照时通过对焦算法,让g1镜头和g2镜头沿着光轴分别调整对焦距离,共同作用搭配组合实施af功能,比如,g1镜头af做粗对焦,g2镜头进行轴向af移动做细对焦,可以减少光学元件对马达位置精度的要求,更容易实现良好的近物距(实现1.0米到无穷远距离的成像)成像效果。
97.另外,采用两个弹性件,降低了装配复杂的工艺组装难度,易于量产化。同时,g1镜头、g2镜头采用弹性件与支架30连接,更容易实现位移,响应速度也比较快。
98.参考图17,图17示出了另一种具体的支架30与第一镜头10和第二镜头20的配合示意图。图17中的部分部件可参考图14中的相同标号。在图17中所示的摄像模组中,第一镜头10和第二镜头20均采用悬浮的方式与支架30连接。与图14中所示的摄像模组的区别在于,第一镜头10和第二镜头20在与支架30连接时,支架30内设置有沿光轴方向(如图中虚线所示的方向)延伸的滑轴1000,第一镜头10和第二镜头20分别滑动装配在滑轴1000上。拍摄远处的景物时通过算法计算出g1镜头和g2镜头的最佳搭配距离来成像对焦,达成更高质量的成像效果,可以降低不同视场下的像场弯曲,提高画面成像质量的对焦方式。在这种架构下g1镜头和g2镜头是由单独的音圈马达或者其他马达(sma或者压电马达)驱动,沿着滑轴1000运动。
99.防抖马达700和图14和图16所示的摄像模组相同,是通过支架30底部的磁铁产生的磁场和底座800上的线圈coil通电产生的洛伦兹力推动4根或多跟弹簧、悬丝来产生位移,实现整体镜头组移动防抖。
100.本实施例是在直立式折返架构基础上的进一步优化,让g1镜头和g2镜头用2个独立的控制马达闭环控制,拍照时通过对焦算法,让g1镜头和g2镜头沿着光轴分别调整对焦距离,共同作用搭配组合实施af功能,比如,g1镜头af做粗对焦,g2镜头进行轴向af移动做细对焦,可以减少光学元件对马达位置精度的要求,更容易实现良好的近物距成像效果。
101.另外,g1镜头和g2镜头都参与对焦,减少了镜头位置硬件检测重复性精度的要求,现有的霍尔传感器硬件检测电路容易实现;不依赖于更高难度的tmr等高精度位置检测元件。
102.g1镜头和g2镜头都参与对焦的情况下,各个视场下的成像效果将得到很大提升,特别是视场弯曲将得到很大程度的改善。
103.g1镜头和g2镜头穿在滑轴上移动实现对焦,可以有效的消除偏心,光轴偏移得到有效消除。
104.参考图18,图18示出了另一种具体的支架30与第一镜头10和第二镜头20的配合示意图。图18中的部分部件可参考图14中的相同标号。在图18中所示的摄像模组中,第一镜头10和第二镜头20均采用滚珠马达与支架30连接。滚珠马达包括设置在支架上的滑槽,该滑槽的长度方向平行于光轴。滚动装配在第一镜头10和第二镜头20的滚珠2000,该滚珠2000可在滑槽内滚动,还包括设置在支架内的电磁铁,以及设置在第一镜头10和第二镜头20内的永磁体。通过电磁铁与永磁体的作用驱动第一镜头10和第二镜20头沿光轴移动,并通过滚珠2000与滑槽的配合限定第一镜头10和第二镜头20的运动方向。
105.在拍摄远处的景物时通过算法计算出g1镜头和g2镜头的最佳搭配距离来成像对焦,达成更高质量的成像效果,可以降低不同视场下的像场弯曲,提高画面成像质量的对焦方式。
106.防抖马达700和图14和图16所示的摄像模组相同,是通过支架30底部的磁铁产生的磁场和底座800上的线圈coil通电产生的洛伦兹力推动4根或多跟弹簧、悬丝来产生位移,实现整体镜头组移动防抖。
107.本实施例是在直立式折返架构基础上的进一步优化,让g1镜头和g2镜头用2个独立的控制马达闭环控制,拍照时通过对焦算法,让g1镜头和g2镜头沿着滑槽分别调整对焦距离,共同作用搭配组合实施af功能,比如,g1镜头af做粗对焦,g2镜头进行轴向af移动做细对焦,可以减少光学元件对马达位置精度的要求,更容易实现良好的近物距成像效果。
108.另外,g1镜头和g2镜头都参与对焦,减少了镜头位置硬件检测重复性精度的要求,现有的霍尔传感器硬件检测电路容易实现;不依赖于更高难度的tmr等高精度位置检测元件。
109.g1镜头和g2镜头都参与对焦的情况下,各个视场下的成像效果将得到很大提升,特别是视场弯曲将得到很大程度的改善。
110.g1镜头和g2镜头穿在滑轴上移动实现对焦,可以有效的消除偏心,光轴偏移得到有效消除。
111.通过上述描述可看出,在本技术实施例中,可采用不同的调焦结构实现镜头模组
的调焦。另外,通过第三弹性件将镜头模组与摄像模组连接,再与防抖马达的配合,实现了防抖效果。
112.本技术实施例还供了一种终端,该终端可以为手机、平板电脑、笔记本电脑等常见的终端。但是无论采用上述哪一个终端,其均包括壳体以及设置在所述壳体内的上述任一项所述的摄像模组。在上述技术方案中,通过第一透镜实现折返光路,从而实现长焦镜头的效果,另外,由于光路进行折返,从而可采用较小尺寸的直立式镜头模组,降低了摄像模组的尺寸,使得摄像模组可适应终端的薄型化发展。
113.显然,本领域的技术人员可以对本技术进行各种改动和变型而不脱离本技术的精神和范围。这样,倘若本技术的这些修改和变型属于本技术权利要求及其等同技术的范围之内,则本技术也意图包含这些改动和变型在内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。