rdf条件下水泥窑分解炉出口温度双闭环模糊控制方法
技术领域
1.本发明涉及水泥窑温度模糊控制领域,尤其涉及一种rdf条件下水泥窑分解炉出口温度双闭环模糊控制方法。
背景技术:
2.水泥熟料生产过程中分解炉生产过程是对生料进行分解的过程,通过调节分解炉中煤粉喂料量(即尾煤)达到稳定分解炉内温度。喂煤量过大,分解炉燃烧不完全,煤粉进入预热器5级筒(c5),形成局部高温,造成下料管结皮、堵塞,另外,会造成分解炉温度过高,分解率过高,液相提前,造成熟料过烧,产生黏散料;喂煤量过小,分解用热不足,分解率低,将使窑热负荷增加,造成生烧料。由于分解炉出口温度控制系统受许多变量的影响,过程变量具有瞬变性和非线性,因此分解炉出口温度控制长期以来是水泥生产过程控制的难点。
3.在国家大力提倡科学治理环境,实现可持续性发展的新形势下,将垃圾处理与水泥生产相结合,在分解炉中通过焚烧手段对垃圾做无公害处理,同时通过燃烧垃圾中的有机物获取一定的能量,降低水泥生产的能源消耗,是总体有效的节能、环保、降耗的水泥生产新工艺。
4.rdf(refuse derived fuel垃圾衍生燃料)水泥生产工艺是将垃圾输送到高温的水泥窑分解炉中,进行无公害高温处理,并汲取有机物燃烧过程的能量,达到减能增效的目的。在rdf条件下,分解炉的尾温控制又会受到来自垃圾中的许多不定因素的影响,垃圾的品种(固废、废液、污泥、生活垃圾)和垃圾中的水分、热值等不定因素,都将引起分解炉出口温度急剧波动;作为热源的一部分,垃圾喂料计量由于所处环境恶劣,无法稳定垃圾喂料量的恒定,这又从另一方面影响着分解炉出口温度控制的稳定由于垃圾协同焚烧很大程度上影响着水泥生产过程中窑况的稳定性。rdf作为环保型的水泥生产工艺在国内外尚处于起始阶段,许多水泥生产企业都很难同时兼顾水泥产量和垃圾处理量。对rdf条件下水泥生产过程控制成为一个摆在大家面前的新课题。
5.由于垃圾的处置量波动、垃圾中的水分、热值、挥发分等指标波动大,这导致了分解炉出口温度控制的难度进一步加大,分解炉温度的波动将破坏水泥生产过程中热工制度的平衡和稳定,影响水泥熟料的质量和产量。由于垃圾的成分复杂、热值波动大,采用传统的尾温控制模式已不能满足新形式下的水泥生产过程控制的需要。
技术实现要素:
6.本发明主要目的在于提供一种可以克服rdf条件下分解炉生产过程中垃圾因素的影响,稳定分解炉出口温度的模糊控制方法。
7.本发明所采用的技术方案是:
8.提供一种rdf条件下水泥窑分解炉出口温度双闭环模糊控制方法,包括以下步骤:
9.s1、建立rdf条件下水泥窑的双闭环模糊控制结构,包括作为第一级模糊控制的外环模糊控制器和作为第二级模糊控制的内环模糊控制器,第一级模糊控制的输入为炉出口
温度误差ε1和炉出口温度误差变化率dε1,输出为尾煤给煤调节量第二级模糊控制的输入为垃圾处置量误差ε2和误差变化率dε2,输出为垃圾处置调节量
10.s2、建立模拟量隶属函数模型,将两级模糊控制的四个输入值和两个输出值进行分解并划分等级,并分别用相应的论域模糊语言进行描述,得到模糊变量赋值表,包括炉出口温度误差ε1模糊向量表、炉出口温度误差变化率dε1模糊向量表、垃圾处置量误差ε2模糊向量表、垃圾处置量误差变化率dε2模糊向量表、尾煤给煤调节量模糊向量表、垃圾处置调节量模糊向量表;
11.s3、根据尾煤给煤调节建立第一级模糊控制规则,并根据该第一级模糊控制规则得到尾煤调节与炉出口温度误差、炉出口温度误差变化率的模糊关系矩阵;根据垃圾处置量调节建立第二级模糊控制规则,并根据该第二级模糊控制规则得到垃圾处置量调节与垃圾处置量误差、垃圾处置量误差变化率的模糊关系矩阵,并根据模糊控制合成规则,得到尾煤给煤调节量和垃圾处置调节量的模糊计算表达式;
12.s4、根据实时采集到的模拟量,对照赋值表,根据模糊计算表达式计算得到模糊控制量,完成rdf条件下水泥窑分解炉出口温度控制。
13.接上述技术方案,步骤s2中,将两级模糊控制的四个输入值进行分解并划分等级具体为:
14.分解炉出口温度误差ε1,按误差值
±
5℃、
±
10℃,划分为5个等级,并用论域模糊语言进行描述;
15.分解炉出口温度误差变化率dε1,按误差值变化率
±
0.6℃/s、
±
1.6℃/s,划分为5个等级,并用论域模糊语言进行描述;
16.分解垃圾处置量误差ε2,按误差
±
3t/h、
±
6t/h,划分为5个等级,并用论域模糊语言进行描述;
17.分解垃圾处置量误差变化率dε2,按误差值变化率
±
0.9t/h/m、
±
1.8t/h/m,划分为5个等级,并用论域模糊语言进行描述。
18.接上述技术方案,步骤s2中,将两级模糊控制的两个输出值进行分解并划分等级具体为:
19.分解第一级模糊控制输出按尾煤给煤
±
1%、
±
2%的调整量,划分为5个等级,并用论域模糊语言进行描述;
20.分解第二级模糊控制输出按垃圾处置量小时均值
±
2%、
±
4%的调整量,划分为5个等级,并用论域模糊语言进行描述。
21.接上述技术方案,第一级模糊控制的尾煤给煤调节量和第二级模糊控制的垃圾处置调节量的取值遵循的模糊控制原则为:
22.1)隶属度最大值原则;
23.2)在隶属度值同为最大值情况下,首选等级绝对值最小的等级值,根据对应的等级值,对尾煤给煤和垃圾处置量进行自动调节。
24.接上述技术方案,第一级模糊控制规则具体如下:
25.1)若ε1正大且dε1正大,则负大;
26.2)若ε1正大且dε1正小,则负大;
27.3)若ε1正小且dε1正大,则负小;
28.4)若ε1负大且dε1负大,则正大;
29.5)若ε1负大且dε1负小,则正大;
30.6)若ε1负小且dε1负大,则正小。
31.接上述技术方案,第二级模糊控制规则具体如下:
32.1)若ε2正大且dε2正大,则负大;
33.2)若ε2正大且dε2正小,则负小;
34.3)若ε2正小且dε2正大,则负小;
35.4)若ε2负大且dε2负大,则正大;
36.5)若ε2负大且dε2负小,则正小;
37.6)若ε2负小且dε2负大,则正小。
38.本发明还提供一种rdf条件下水泥窑分解炉出口温度双闭环模糊控制系统,包括:
39.双闭环模糊控制器构建模块,用于建立rdf条件下水泥窑的双闭环模糊控制结构,包括作为第一级模糊控制的外环模糊控制器和作为第二级模糊控制的内环模糊控制器,第一级模糊控制的输入为炉出口温度误差ε1和炉出口温度误差变化率dε1,输出为尾煤给煤调节量第二级模糊控制的输入为垃圾处置量误差ε2和误差变化率dε2,输出为垃圾处置调节量
40.隶属函数模型建立模块,用于建立模拟量隶属函数模型,将两级模糊控制的四个输入值和两个输出值进行分解并划分等级,并分别用相应的论域模糊语言进行描述,得到赋值表,包括炉出口温度误差ε1模糊向量表、炉出口温度误差变化率dε1模糊向量表、垃圾处置量误差ε2模糊向量表、垃圾处置量误差变化率dε2模糊向量表、尾煤给煤调节量模糊向量表、垃圾处置调节量模糊向量表;
41.模糊控制规则建立模块,用于根据尾煤给煤调节建立第一级模糊控制规则,并根据该第一级模糊控制规则得到尾煤调节与炉出口温度误差、炉出口温度误差变化率的模糊关系矩阵;根据垃圾处置量调节建立第二级模糊控制规则,并根据该第二级模糊控制规则得到垃圾处置量调节与垃圾处置量误差、垃圾处置量误差变化率的模糊关系矩阵,并根据模糊控制合成规则,得到尾煤给煤调节量和垃圾处置调节量的模糊计算表达式;
42.实时控制模块,用于根据实时采集到的模拟量,对照赋值表,根据模糊计算表达式计算得到模糊控制量,完成rdf条件下水泥窑分解炉出口温度控制。
43.本发明还提供一种计算机存储介质,其可被处理器执行,且其内存储有计算机程序,该计算机程序执行上述技术方案的rdf条件下水泥窑分解炉出口温度双闭环模糊控制方法。
44.本发明产生的有益效果是:本发明采用模糊控制方法,对因垃圾品种和垃圾处置量波动造成的分解炉出口温度波动,采用rdf条件下水泥窑分解炉温度双闭环控制系统,外环采用模糊控制方法,对于尾温出现的波动,根据历史经验给出相应的尾煤调节量;对于模糊计算得出的尾煤调节量,通过内环控制,调整因垃圾给料造成的燃料型波动,采用模糊控制,保证输送到分解炉内的燃料处于稳定状态,从而保证外环模糊控制的实际效果,稳定分解炉出口温度。
附图说明
45.下面将结合附图及实施例对本发明作进一步说明,附图中:
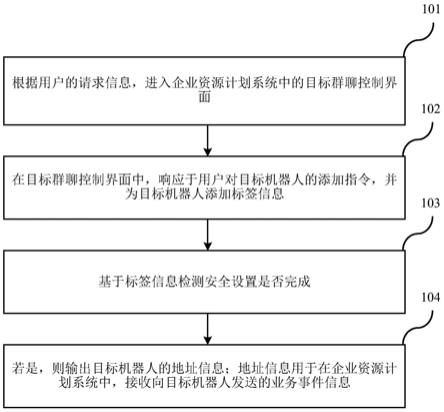
46.图1是本发明实施例rdf条件下水泥窑分解炉出口温度双闭环模糊控制方法的流程图;
47.图2是本发明实施例rdf条件下尾温双闭环控制系统结构框图;
具体实施方式
48.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
49.如图1所示,本发明实施例rdf条件下水泥窑分解炉出口温度双闭环模糊控制方法,包括以下步骤:
50.s1、建立rdf条件下水泥窑的双闭环模糊控制结构,包括作为第一级模糊控制的外环模糊控制器和作为第二级模糊控制的内环模糊控制器,第一级模糊控制的输入为炉出口温度误差ε1和炉出口温度误差变化率dε1,输出为尾煤给煤调节量第二级模糊控制的输入为垃圾处置量误差ε2和误差变化率dε2,输出为垃圾处置调节量
51.s2、建立模拟量隶属函数模型,将两级模糊控制的四个输入值和两个输出值进行分解并划分等级,并分别用相应的论域模糊语言进行描述,得到赋值表,包括炉出口温度误差ε1模糊向量表、炉出口温度误差变化率dε1模糊向量表、垃圾处置量误差ε2模糊向量表、垃圾处置量误差变化率dε2模糊向量表、尾煤给煤调节量模糊向量表、垃圾处置调节量模糊向量表;
52.s3、根据尾煤给煤调节建立第一级模糊控制规则,并根据该第一级模糊控制规则得到尾煤调节与炉出口温度误差、炉出口温度误差变化率的模糊关系矩阵;根据垃圾处置量调节建立第二级模糊控制规则,并根据该第二级模糊控制规则得到垃圾处置量调节与垃圾处置量误差、垃圾处置量误差变化率的模糊关系矩阵,并根据模糊控制合成规则,得到尾煤给煤调节量和垃圾处置调节量的模糊计算表达式;
53.s4、根据实时采集到的模拟量,对照赋值表,根据模糊计算表达式计算得到模糊控制量,完成rdf条件下水泥窑分解炉出口温度控制。
54.如图2所示,建立的双闭环控制系统包括外环控制器、内环控制器、执行机构和受控对象,该系统由两级模糊控制器组成,控制尾温稳定。本发明实施例中受控对象为煤粉喂料量与分解炉温度场之间的传递函数(包括煤粉输送过程的滞后环节、垃圾输送波动的扰
动环节、生料投料量与尾温的非线性环节、三次风温和风量与尾温间的非线性环节等等)。执行机构(包括变频器、转子流量秤)对于尾温扰动的影响不大,故不考虑。系统的输入是尾温误差及误差变化率、垃圾处置量误差及误差变化率,系统的输出是尾煤调节量、垃圾处置调节量。系统的输出是为了对克服垃圾处置过程中因垃圾水分、热值、处置量的波动对分解炉出口温度的负面影响。表征尾煤调节的特征指标是分解炉尾煤给煤量,表征垃圾调节的特征指标是垃圾处置量小时均值,模糊控制器输出的调节量是对相应的百分比调节量。
55.本发明较佳实施例中,以正态分布函数作为模拟量隶属函数模型:
[0056][0057]
对于分解炉出口温度误差,a为尾温误差值,b取值为8;对于分解炉出口温度误差变化率,a为尾温误差变化率,b取值为1.0;对于垃圾喂料量误差,a为垃圾处置量误差值,b取值为4.8;对于垃圾喂料量误差变化率,a为垃圾处置量误差变化率,b取值为2.4
[0058]
分解炉出口温度误差,按误差值
±
5℃,,
±
10℃,划分为5个等级,该论域模糊语言描述为nb、ns、o、ps、pb,则有
[0059][0060][0061][0062][0063][0064]
分解炉出口温度误差变化率,按误差值变化率
±
0.6℃/s、
±
1.6℃/s,划分为5个等级,该论域模糊语言描述为nb、ns、o、ps、pb,则有
[0065][0066][0067][0068]
[0069][0070]
对于垃圾处置量误差,按误差
±
3t/h、
±
6t/h,划分为5个等级,该论域模糊语言描述为nb、ns、o、ps、pb,则有
[0071][0072][0073][0074][0075][0076]
对于垃圾处置量误差变化率,按误差值变化率
±
0.9t/h/m,
±
1.8t/h/m,划分为5个等级,该论域模糊语言描述为nb、ns、o、ps、pb,则有
[0077][0078][0079][0080][0081][0082]
对于第一级模糊控制输出c1,按尾煤给煤
±
1%、
±
2%的调整量,划分为5个等级,该论域模糊语言描述为nb、ns、o、ps、pb,则有
[0083][0084][0085]
[0086][0087][0088]
对于第二级模糊控制输出c2,按处置量小时均值
±
2%、
±
4%的调整量,划分为5个等级,该论域模糊语言描述为nb、ns、o、ps、pb,则有
[0089][0090][0091][0092][0093][0094]
由此得到模糊变量ε1、dε1、ε2、dε2、赋值表,如下表1-6所示。
[0095]
表1.炉出口温度误差ε1模糊向量表
[0096][0097]
表2.为温误差变化率dε1模糊向量表
[0098][0099]
表3.垃圾处置量误差ε2模糊向量表
[0100][0101]
表4.垃圾处置量误差变化率dε2模糊向量表
[0102][0103]
表5.尾煤调节量模糊向量表
[0104][0105]
表6.垃圾处置调节量模糊向量
[0106][0107]
本发明实施例中,第一级模糊控制的尾煤给煤调节量和第二级模糊控制的垃圾调节量取值遵循原则为:
[0108]
1)隶属度最大值原则;
[0109]
2)在隶属度值同为最大值情况下,首选等级绝对值最小的等级值。根据对应的等级值,对尾煤和垃圾处置量进行自动调节。
[0110]
本发明的一个较佳实施例中,对于尾煤给煤调节,第一级模糊控制规则可以归纳
如下:
[0111]
1)若ε1正大且dε1正大,则负大;
[0112]
2)若ε1正大且dε1正小,则负大;
[0113]
3)若ε1正小且dε1正大,则负小;
[0114]
4)若ε1负大且dε1负大,则正大;
[0115]
5)若ε1负大且dε1负小,则正大;
[0116]
6)若ε1负小且dε1负大,则正小。
[0117]
根据上述控制规则,得到尾煤给煤与尾温误差和误差变化率的模糊关系矩阵
[0118][0119]
对于垃圾处置量调节,第二级模糊控制规则可以归纳如下:
[0120]
1)若ε2正大且dε2正大,则负大;
[0121]
2)若ε2正大且dε2正小,则负小;
[0122]
3)若ε2正小且dε2正大,则负小;
[0123]
4)若ε2负大且dε2负大,则正大;
[0124]
5)若ε2负大且dε2负小,则正小;
[0125]
6)若ε2负小且dε2负大,则正小。
[0126]
由以上推理规则,得到垃圾处置调整量与垃圾处置量误差和误差变化率的模糊关系矩阵为:
[0127][0128]
根据模糊控制合成规则,尾煤给煤调节量和垃圾调节量分别为:
[0129][0130][0131]
式中t表示矩阵转置,o表示模糊运算。
[0132][0133][0134]
xi表示各元素等级值,相应元素等级下的垃圾调节向量中元素的隶属度,
表示相应元素等级下的尾煤调节向量中元素的隶属度。根据实时采集到的模拟量,对照相应的赋值表,完成变量:当前尾温误差和误差变化率、垃圾处置量误差和误差变化率由基本论域向模糊论域的变换,由(10)和(11)式得到是一个1
×
5的模糊向量。
[0135]
当前,实时获取的分解炉出口温度与设定值误差为8℃,误差变化率是0.9℃/s(小时尾煤给煤均值为12.8),垃圾处置量与设定值误差为4t/h,误差变化率为0.7t/h/m,根据隶属函数式模糊变量赋值表1、表2、表3、表4,可分别得到当前的工况是:当前尾温误差、垃圾处置量误差及相应误差变化率的模糊向量分别为:
[0136][0137][0138][0139][0140]
则
[0141][0142]
由式(10)计算可得:
[0143][0144]
同理可得:
[0145][0146]
由式(11)计算可得:
[0147][0148]
根据隶属度最大原则,此时应对尾煤给煤进行大幅减煤处理。
[0149]
根据在隶属度值同为最大值情况下,首选等级绝对值最小的等级值,垃圾处置量调节应保持不变。
[0150]
本发明实施例rdf条件下水泥窑分解炉出口温度双闭环模糊控制系统主要用于实现上述实施例的模糊控制方法,该系统具体包括:
[0151]
双闭环模糊控制器构建模块,用于建立rdf条件下水泥窑的双闭环模糊控制结构,包括作为第一级模糊控制的外环模糊控制器和作为第二级模糊控制的内环模糊控制器,第一级模糊控制的输入为炉出口温度误差ε1和炉出口温度误差变化率dε1,输出为尾煤给煤调节量第二级模糊控制的输入为垃圾处置量误差ε2和误差变化率dε2,输出为垃圾处置调节量
[0152]
隶属函数模型建立模块,用于建立模拟量隶属函数模型,将两级模糊控制的四个输入值和两个输出值进行分解并划分等级,并分别用相应的论域模糊语言进行描述,得到赋值表,包括炉出口温度误差ε1模糊向量表、炉出口温度误差变化率dε1模糊向量表、垃圾处
置量误差ε2模糊向量表、垃圾处置量误差变化率dε2模糊向量表、尾煤给煤调节量模糊向量表、垃圾处置调节量模糊向量表;
[0153]
模糊控制规则建立模块,用于根据尾煤给煤调节建立第一级模糊控制规则,并根据该第一级模糊控制规则得到尾煤调节与炉出口温度误差、炉出口温度误差变化率的模糊关系矩阵;根据垃圾处置量调节建立第二级模糊控制规则,并根据该第二级模糊控制规则得到垃圾处置量调节与垃圾处置量误差、垃圾处置量误差变化率的模糊关系矩阵,并根据模糊控制合成规则,得到尾煤给煤调节量和垃圾处置调节量的模糊计算表达式;
[0154]
实时控制模块,用于根据实时采集到的模拟量,对照赋值表,根据模糊计算表达式计算得到模糊控制量,完成rdf条件下水泥窑分解炉出口温度控制。
[0155]
本发明实施例的rdf条件下水泥窑分解炉出口温度双闭环模糊控制系统,通过dcs系统(distribued control system分布式控制系统)完成数据的采集,在后台完成模糊控制运算,给出尾煤调节量和垃圾处置调节量。
[0156]
本发明还提供一种计算机可读存储介质,如闪存、硬盘、多媒体卡、卡型存储器(例如,sd或dx存储器等)、随机访问存储器(ram)、静态随机访问存储器(sram)、只读存储器(rom)、电可擦除可编程只读存储器(eeprom)、可编程只读存储器(prom)、磁性存储器、磁盘、光盘、服务器、app应用商城等等,其上存储有计算机程序,程序被处理器执行时实现相应功能。本实施例的计算机可读存储介质用于被处理器执行时实现上述方法实施例的rdf条件下水泥窑分解炉出口温度双闭环模糊控制方法。
[0157]
本发明通过建立rdf条件下分解炉出口温度双闭环模糊控制系统结构,对于外环控制系统,以历史数据为基础建立尾温误差和误差变化率的隶属度函数。建立相应的模糊控制规则,对以尾温变化趋势中的误差和误差的变化率,建立二维模糊运算,得到尾温变化与燃料给定的模糊关系矩阵;对于内环控制系统,以长期经验值建立垃圾喂料量误差和误差变化率的隶属度函数,建立相应的模糊控制规则;对以垃圾处置量波动中出现的误差和误差的变化量,建立二维模糊运算,得到垃圾处置量波动与燃料调节量的模糊关系矩阵,从而实现rdf条件下分解炉出口温度双闭环模糊控制系统。
[0158]
综上,本发明以dcs平台为基础,结合水泥制造工艺理论和实际工作经验,对于rdf条件下窑尾分解炉出口温度因垃圾成分的变化、垃圾处置量的变化,通过建立两级模糊控制,对当前分解炉出口温度的误差和误差变化率、垃圾处置量误差和误差变化率建立模糊控制规则,实现二级二维模糊控制,稳定了水泥窑分解炉出口温度。
[0159]
应当理解的是,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,而所有这些改进和变换都应属于本发明所附权利要求的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。