1.本发明涉及智能清洁机领域,清洁机主要用于在地面上自位移行走来进行拖地清洁,具体涉及到一种清洁机系统。
背景技术:
2.现有清洁机主要用于在地面上进行行走来吸尘清洁和拖地清洁,清洁机行走的动力主要通过设置驱动轮来实现带动清洁机的位移行走,一般设置左右两个驱动轮,驱动轮的后侧或前侧设置拖布,驱动轮工作旋转带动清洁机行走并实现带动拖布在地面上位移进行擦地拖地效果,驱动轮主要通过轮胎外部的胎面与地面之间的摩擦力来带动清洁机行走,因轮胎与地面的接触面积小,导致驱动轮容易出现打滑的问题,特别是清洁机在拖地过程中使得地面有一定的水分导致驱动轮极易打滑,导致清洁机行走轨迹容易偏移,不利于清洁机来进行稳定的拖地清洁,同时清洁机的整体结构复杂、成本较高。
3.同时现有的清洁机因设置有驱动轮,驱动轮的结构限制了清洁机上的拖布位置和拖布面积,导致拖布难以清扫到室内地面的墙边、墙角位置,在长时间试用下容易导致墙边、墙角积灰,影响用户使用体验;同时因清洁机设置驱动轮来自行走,当用户需要对室内地面上清洁机无法进行拖地清洁的部分进行清洁处理时,此时需要单独的手持式拖地机来进行独立处理,导致用户必须准备清洁机和手持拖地机,不方便用户使用,因清洁机和手持式拖地机上均设置有拖布和水箱,导致用户操作难度增加,且工作量增大,需要多次清洗拖布和加水等工作,可见现有的清洁机无法实现具备多功能的使用效果。
技术实现要素:
4.本发明旨在至少在一定程度上解决上述相关技术中的技术问题之一。
5.为此,本发明的目的在于提供一种清洁机系统,主要解决现有清洁机无法具备多功能的使用效果,以及解决现有清洁机结构复杂成本高且在拖地过程中容易出现行走偏位的问题,同时解决现有手持式拖地机需要人为推动行走进行拖地清洁的使用不便问题。
6.本发明的实施方式提供了一种清洁机系统,清洁机包括机器主体,机器主体上设置有清洁组件,清洁组件设置为可运动的结构,清洁机系统包括自移动清洁模式和手持清洁模式;当把手杆未安装在位时则清洁机可执行自移动清洁模式,当把手杆安装在位时则清洁机可执行手持清洁模式。
7.前述的一种清洁机系统,还包括检测模块,检测模块用于检测把手杆是否安装于机器主体上;自移动清洁模式或手持清洁模式包括清洁组件运动时通过清洁组件自身运动时与工作面的摩擦力来带动清洁机在工作面上进行位移。
8.前述的一种清洁机系统,自移动清洁模式中还包括当机器主体上的悬崖模块检测到悬空位时则清洁组件运动并带动清洁机进行后退位移或转弯位移。
9.前述的一种清洁机系统,自移动清洁模式中还包括当碰撞模块检测到机器主体接触障碍物时则清洁组件运动并带动清洁机进行后退位移或转弯位移。
10.前述的一种清洁机系统,自移动清洁模式中还包括当障碍物检测模块检测到机器主体侧部方向上的障碍物时则清洁组件运动并带动清洁机进行后退位移或转弯位移。
11.前述的一种清洁机系统,自移动清洁模式中还包括当地毯检测模块检测到机器主体的下侧方向上的地毯时则清洁组件运动并带动清洁机进行后退位移或转弯位移。
12.前述的一种清洁机系统,清洁组件设置为可贴合工作面水平旋转的运动结构,且当清洁组件水平旋转时清洁组件的底部表面相对工作面具有不均衡的摩擦力使得通过清洁组件来带动清洁机在工作面上进行位移。
13.前述的一种清洁机系统,清洁组件的数量设置为两个及以上;当清洁组件的数量设置为两个时则两个清洁组件呈并列相邻布置结构,且两个清洁组件的水平旋转方向至少包括相反。
14.前述的一种清洁机系统,两个清洁组件的水平旋转运动方向为从机器主体的外侧朝向内侧且从上侧朝向下侧且两个清洁组件均朝向两个清洁组件之间的方向水平旋转。
15.前述的一种清洁机系统,在自移动清洁模式中,控制两个清洁组件的水平旋转运动方向切换为反方向水平旋转运动来使得两个反方向水平旋转运动的清洁组件带动清洁机进行后退位移。
16.前述的一种清洁机系统,在自移动清洁模式中,控制其中一个清洁组件停止运动且其中另一个清洁组件设置为朝向该其中一个清洁组件的方向水平旋转运动来带动清洁机朝向该其中一个清洁组件方向进行转弯位移。
17.前述的一种清洁机系统,在自移动清洁模式中,控制其中一个清洁组件的水平旋转方向切换为与其中另一个清洁组件的水平旋转方向相同且设置为朝向该其中另一个清洁组件的方向水平旋转来带动清洁机朝向该其中另一个清洁组件方向进行转弯位移。
18.前述的一种清洁机系统,在自移动清洁模式中,控制其中一个清洁组件与工作面的摩擦力大于其中另一个清洁组件与工作面的摩擦力来带动清洁机朝向该其中另一个清洁组件方向进行转弯位移。
19.前述的一种清洁机系统,在手持清洁模式中,控制模块在基于悬崖模块检测到悬空位时或基于碰撞模块检测检测到机器主体接触障碍物时或基于障碍物检测模块检测到机器主体侧部方向上的障碍物时则控制清洁组件至少沿当前运动状态下持续运动或停止运动。
20.前述的一种清洁机系统,在手持清洁模式中,控制模块在基于障碍物检测模块检测到机器主体侧部方向上的障碍物时则控制清洁组件沿障碍物保持恒定距离进行位移沿边清洁。
21.前述的一种清洁机系统,检测模块与控制模块电性相连,检测模块将检测到的检测信号反馈到控制模块内,控制模块根据检测信号来判断清洁机可启动自移动清洁模式或手持清洁模式,检测模块设置为红外传感器或霍尔开关或微动开关或极片接触开关或干簧管开关其中的一种。
22.前述的一种清洁机系统,把手杆上设置有遥控模块,当把手杆未安装于机器主体上时则可通过把手杆遥控清洁机启动自移动清洁模式。
23.前述的一种清洁机系统,机器主体上设置有感应模块,当检测模块检测到把手杆未安装在位时,则感应模块可检测把手杆发出的遥控信号并可控制清洁机启动自移动清洁
模式。
24.前述的一种清洁机系统,机器主体上设置有压接组件,当清洁机位于工作面上且清洁组件贴合工作面水平旋转时至少压接组件的一部分接触清洁组件使得清洁组件的底部表面相对工作面具有不均衡的摩擦力使得清洁机进行位移。
25.前述的一种清洁机系统,两个清洁组件上分别设置有压接组件,且两个压接组件分别压接两个清洁组件的一部分,其中一个压接组件对其中一个清洁组件的压力设置为f1,其中另一个压接组件对其中另一个清洁组件上的压力设置为f2,当清洁机朝向该其中一个清洁组件方向转弯位移时则f1大于f2,当清洁机朝向该其中另一个清洁组件方向转弯位移时则f2大于f1。
26.前述的一种清洁机系统,清洁组件的底部表面设置为软性结构;当清洁组件贴合工作面时清洁组件呈倾斜结构;或当清洁组件贴合工作面时清洁组件的底部表面至少形成第一变形部和第二变形部,且第一变形部的变形量大于第二变形部的变形量。
27.前述的一种清洁机系统,当清洁组件呈倾斜结构时清洁组件设置为从所述机器主体的内侧朝向外侧方向且为由高向低的倾斜结构。
28.前述的一种清洁机系统,当把手杆安装在位或拆卸下时,机器主体上的语音单元发出把手杆的状态切换提示;或显示单元显示出把手杆的状态切换提示;或清洁组件持续间歇运动来发出把手杆的状态切换提示。
29.前述的一种清洁机系统,把手杆上设置有第一启动键且当用户启动第一启动键时清洁机执行手持清洁模式;机器主体上设置有第二启动键且当用户启动第二启动键时清洁机执行自移动清洁模式。
30.前述的一种清洁机系统,还包括清洗装置,清洗装置用于放置清洁机来对清洁组件进行清洗;清洗装置上设置有容液腔当清洁机放置在清洗装置上时清洁组件位于容液腔,和/或清洗装置上设置有烘干模块当清洁机放置在清洗装置上时烘干模块位于清洁组件的一侧来对清洁组件进行烘干。
31.与现有技术相比,本发明具有如下有益效果:
32.本方案的清洁机的清洁组件设置可以运动结构,具体的设为可水平旋转运动的结构,实现清洁组件的运动结构可以实现带动清洁机进行位移行走,实现大面积拖地清洁的同时,能够代替现有清洁机上的驱动轮来带动清洁机行走的结构,整体结构更简单,清洁组件可以实现对机器主体的底部大面积覆盖,可以有效的针对墙边、墙角进行拖地处理。
33.本方案的清洁组件设置为水平旋转结构,清洁组件可以有效的覆盖机器主体的底部,实现大面的水平旋转运动结构,使得清洁组件与地面之间接触的面积大,在带动清洁机进行位移时能有效的防止打滑问题,有利于保持清洁机进行稳定的位移行走,不会出现位移行走偏位的问题。
34.本方案的清洁机设置自移动清洁模式和手持清洁模式,实现清洁机的多功能使用效果,当把手杆未安装在位时此时清洁机可以来执行自移动清洁模式,实现清洁机在地面上进行自主的位移移动行走来拖地,此时无需用户手动操作;当把手杆安装在位时此时清洁机可以来执行手持清洁模式,实现用户手动控制清洁机在地面上来进行拖地;实现两种清洁模式方便用户选择。
35.本方案通过检测模块来检测把手杆是否安装于机器主体上,通过检测模块来区分
判断清洁机可以执行自移动清洁模式还是手持清洁模式,进而实现来限定悬崖模块、碰撞模块、障碍物检测模块、地毯检测模块的工作状态,以便契合清洁机执行适当的模式来进行针对性清洁效果。
36.本方案的清洁机因可以通过把手杆来实现手持清洁模式下的手持带动拖地清洁,虽然用户为手持握住把手杆来进行拖地,但是因清洁组件的水平旋转运动能够带动清洁机进行行走位移,使得用户握住把手杆的时候无需用力推动即可很省力的来实现清洁机的拖地清洁,用户只需要手动控制清洁机位移行走的方向即可,方便用户使用。
37.针对清洁组件与工作面的不均衡摩擦力,本方案可以设置清洁组件为倾斜结构,也可以设置为清洁组件有第一变形部和第二变形部,且具有不同的变形量来实现具有不均衡的摩擦力,进而实现清洁组件的水平旋转带动清洁机的位移行走,整体结构简单,且可靠性高。
38.本方案可以通过压接组件实现清洁组件的底部表面与工作面之间不同大小的摩擦力,通过清洁组件在贴合工作面进行水平旋转时能够在不同大小的摩擦力的作用下进行位移的移动行走,而不是保持在原地位置不动,实现利用清洁组件来带动机器主体的整体位移行走。
39.本方案的清洁组件在压接组件的接触压接下,形成了清洁组件上具有不均衡的压力,或者具有不均衡的摩擦力,进而实现清洁组件在受力不均衡的情况下能自动位移行走,可以取代驱动轮来进行行走。
40.本方案通过设置两个清洁组件,通过两个清洁组件的配合实现清洁机的直线前进行走、直线后退行走和转弯行走,结合两个清洁组件上均相对工作面具有不均衡的摩擦力来实现清洁机进行自动的位移行走,且行走方向可以为直线或转向。
41.本方案还设置清洗装置,利用清洁组件自身的运动力来实现清洁组件的清洗,清洗装置实现供给清洗液来使得清洁组件接触清洗液后实现清洁对清洁组件的清洗,无需人为手动拆卸清洁组件进行清洗,清洗后还可以利用清洁组件的自身运动动力来进行甩干除水效果,方便用户使用。
附图说明
42.图1为清洁机的侧面示意图;
43.图2为清洁机安装把手杆的示意图;
44.图3为把手杆缩回结构后的远程控制清洁机执行清洁任务的示意图;
45.图4为清洁机的底部仰视图中清洁组件的水平旋转示意图;
46.图5为清洁组件相对地面倾斜结构的示意图;
47.图6为清洁组件相对地面贴合并呈倾斜结构的示意图;
48.图7为清洁组件贴合地面上呈第一变形部和第二变形部的示意图;
49.图8为清洁机上压接组件同时压接两个清洁组件的底部示意图;
50.图9为清洁机上压接组件同时压接两个清洁组件的侧面剖视示意图;
51.图10为清洁机上两个压接组件分别压接两个清洁组件的底部示意图;
52.图11为清洁机上两个压接组件分别压接两个清洁组件的侧面剖视示意图;
53.图12为清洁机直线行走进行前进的示意图;
54.图13为清洁机在压接组件的压力下进行朝向右侧转弯的示意图;
55.图14为清洁机在压接组件的压力下进行朝向左侧转弯的示意图;
56.图15为两个清洁组件水平旋转方向一致下进行朝向右侧转弯的示意图;
57.图16为两个清洁组件水平旋转方向一致下进行朝向左侧转弯的示意图;
58.图17为一个清洁组件停止运动且另一个清洁组件运动来进行朝向右侧转弯的示意图;
59.图18为一个清洁组件停止运动且另一个清洁组件运动来进行朝向左侧转弯的示意图;
60.图19为清洁机位于清洗装置上来清洗清洁组件的示意图。
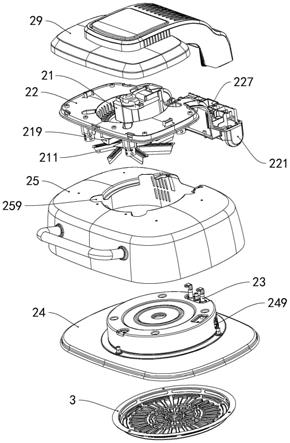
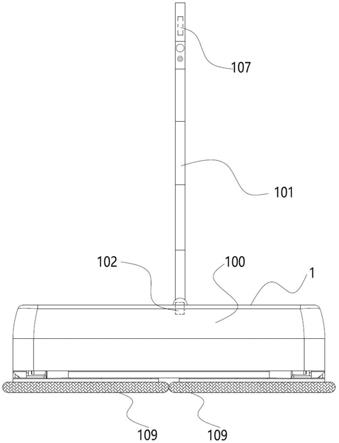
61.附图标记:1-清洁机,100-机器主体,101-把手杆,102-检测模块,103-悬崖模块,104-碰撞模块,105-障碍物检测模块,106-地毯检测模块,107-遥控模块,108-感应模块,109-清洁组件,110-压接组件,111-第一变形部,112-第二变形部,113-压接区,114-清洁区,115-清洗装置。
具体实施方式
62.为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施例,进一步阐述本发明。
63.实施例:本发明的一种清洁机系统,如图1至图19构成所示,清洁机1主要用于在地面上进行位移行走来进行拖地清洁,同时清洁机1可以安装把手杆101来实现成为手持式的清洁机1,实现本方案的清洁机1具备多功能的使用效果,方便用户使用。
64.同时,本方案的清洁机1上的清洁组件109设置为水平旋转运动的结构,实现水平旋转来进行大面积、大摩擦力的拖地清洁效果,以及通过清洁组件109的自身水平旋转运动来带动清洁机1在地面上进行位移行走,代替现有拖地机上设置驱动轮来带动行走的方式,实现清洁机1的整体结构简单且成本更低,且有利于清洁组件109的分布布置来实现取得更好的拖地清洁效果。
65.本方案的一种清洁机系统,清洁机1包括机器主体100,机器主体100可以设置为圆柱形结构或椭圆柱形结构,机器主体100上设置有清洁组件109,清洁组件109设置为可运动的结构,清洁组件109主要用于接触贴合地面来进行拖地清洁,通过清洁组件109的可运动结构实现对地面大面积、大摩擦力的拖地清洁效果,本方案的清洁机系统包括自移动清洁模式和手持清洁模式;自移动清洁模式下清洁机1在地面上自主进行位移行走来实现拖地清洁,清洁机1启动后,主要利用清洁组件109的自身运动的力来实现在地面上的位移行走;手持清洁模式下清洁机1清洁组件109运动同时用户通过手动来控制清洁机1在地面上进行位移行走完成拖地清洁;实现本方案清洁机1的自移动清洁模式和手持清洁模式,方便用户使用,具备多功能使用效果,在自移动清洁模式下清洁机1为自移动的机器人,在手持清洁模式下清洁机1为手持式的拖地机,使得本方案的清洁机1的可适用范围更广。
66.其中,主要为针对清洁机1设置有把手杆101,把手杆101设置为独立的配件,把手杆101与机器主体100之间设置为可拆卸安装结构,当把手杆101安装在机器主体100上时,此时用户可以针对清洁机1来启动自移动清洁模式,当把手杆101从机器主体100上拆卸下即为把手杆101未安装在位时,此时用户可以针对清洁机1来启动手持清洁模式,方便用户
对清洁机1的使用来实现拖地清洁效果。
67.针对自移动清洁模式和手持清洁模式之间的感知切换效果,主要为本方案的清洁机系统还包括检测模块102,检测模块102用于检测把手杆101,把手杆101主要设置为可拆卸地安装于机器主体100上,通过检测模块102来实现对把手杆101是否安装在位进行检测,主要为当检测模块102检测到把手杆101未安装在位时则清洁机1可执行自移动清洁模式,当检测模块102检测到把手杆101安装在位时则清洁机1可执行手持清洁模式;通过检测模块102检测把手杆101是否在位对应来确定清洁机1可以执行的模式,即为可以执行自移动清洁模式或手持清洁模式,方便用于切换使用,在大部分的时间内用户可以启动清洁机1的自移动清洁模式,此时清洁机1在室内地面上进行自移动位移行走来完成拖地清洁任务,当用户需要用清洁机1对特定区域进行拖地清洁时此时可以安装把手杆101在清洁机1的机器主体100上然后启动手持清洁模式,此时方便用户手动来进行拖地清洁。
68.本方案的清洁机1设置自移动清洁模式和手持清洁模式,实现清洁机1的多功能使用效果,当把手杆101未安装在位时此时清洁机1可以来执行自移动清洁模式,实现清洁机1在地面上进行自主的位移移动行走来拖地,此时无需用户手动操作;当把手杆101安装在位时此时清洁机1可以来执行手持清洁模式,实现用户手动控制清洁机1在地面上来进行拖地;实现两种清洁模式方便用户选择。
69.本方案的清洁机1因可以通过把手杆101来实现手持清洁模式下的手持带动拖地清洁,虽然用户为手持握住把手杆101来进行拖地,但是因清洁组件109的水平旋转运动能够带动清洁机1进行行走位移,使得用户握住把手杆101的时候无需用力推动即可很省力的来实现清洁机1的拖地清洁,用户只需要手动控制清洁机1位移行走的方向即可,方便用户使用。
70.针对把手杆101,把手杆101可以设置为多节伸缩结构,即为伸缩节结构,当用户需要安装把手杆101时,此时可以将多节伸展开来实现通过把手杆101操控清洁机1,当拆卸下把手杆101时可以将多节伸缩结构进行压缩缩短,此时把手杆101还可以远程来控制清洁机1启动工作。
71.为了方便用户对自移动清洁模式和手持清洁模式的切换使用,本方案在把手杆101上设置有第一启动键且当用户启动第一启动键时清洁机1执行手持清洁模式;机器主体100上设置有第二启动键且当用户启动第二启动键时清洁机1执行自移动清洁模式,即为用户自主判断把手杆101是否安装在位,同时用户通过启动第一启动键或者第二启动键来对应的启动不同的模式,当把手杆101安装在位时,此时用户可以较为方便的接触到把手杆101来启动第一启动键,此时即可启动手持清洁模式来对应的进行拖地清洁;当用户需要启动自移动清洁模式时此时用于需要启动机器主体100上的第二启动键,此时正常情况下把手杆101未安装在位,用户只有通过第二启动键才可启动自移动清洁模式,进而实现通过用户来自主启动清洁机1的模式,方便用户使用,且清洁机1可以不对把手杆101是否在位进行检测。
72.本方案中,自移动清洁模式或手持清洁模式包括清洁组件109运动时通过清洁组件109自身运动时与工作面的摩擦力来带动清洁机1在工作面上进行位移,工作面可以为地面或玻璃面或瓷砖面,即为通过清洁组件109在水平旋转运动时与地面的摩擦力来带动清洁机1进行位移行走,代替现有驱动轮实现带动清洁机1位移行走的方式,清洁组件109实现
大面积拖地清洁的同时,能够代替现有清洁机1上的驱动轮来带动清洁机1行走的结构,整体结构更简单,清洁组件109可以实现对机器主体100的底部大面积覆盖,可以有效的针对墙边、墙角进行拖地处理。
73.本方案的清洁组件109设置为水平旋转结构,清洁组件109可以有效的覆盖机器主体100的底部,实现大面的水平旋转运动结构,使得清洁组件109与地面之间接触的面积大,在带动清洁机1进行位移时能有效的防止打滑问题,有利于保持清洁机1进行稳定的位移行走,不会出现位移行走偏位的问题。
74.针对清洁组件109的水平旋转结构的动力,设置有驱动机构,驱动机构主要包括电机,通过电机来带动清洁组件109的水平旋转,可以支架将电机轴与清洁组件109相连来清洁组件109的水平旋转结构,也可以通过设置电机轴连接齿轮,通过齿轮来实现带动清洁组件109的水平旋转结构;可以根据电机的转速来对应配置清洁组件109的旋转速度,通过可以通过电机的正转和反转来实现调节清洁组件109的水平旋转方向。
75.其中,本方案中清洁机1的控制模块与清洁组件109电性相连,主要通过控制模块控制清洁组件109水平旋转的开启、停止、水平旋转方向如正转或反转,控制模块内设定控制程序即可实现;当设置有两个清洁组件109时,此时控制模块可以分别控制两个清洁组件109之间独立的开启、停止、水平旋转方向等功能;当然也可以设置一个电机来同步同时带动两个清洁组件109的同步工作,此时控制模块可以控制该电机即可实现同步控制两个清洁组件109的工作。
76.本方案自移动清洁模式中还包括当机器主体100上的悬崖模块103检测到悬空位时则清洁组件109运动并带动清洁机1进行后退位移或转弯位移,此时控制模块控制悬崖模块103正常判断清洁机1是否处于悬空位,防止清洁机1跌落,悬崖模块103设置为红外发射器和红外接收器即可实现对悬空位的检测效果。
77.本方案自移动清洁模式中还包括当碰撞模块104检测到机器主体100接触障碍物时则清洁组件109运动并带动清洁机1进行后退位移或转弯位移,此时控制模块控制碰撞模块104正常检测判断清洁机1的机器主体100是否接触到障碍物,如果接触到障碍物则触发碰撞模块104来实现避障处理,即为控制清洁机1后退位移或转弯位移,碰撞模块104为微动开关,碰撞模块104也可以设置为具有摆动结构的触发件,触发件的一端安装红外接收器和红外发射器,当机器主体100接触障碍物时则导致红外接收器无法接收到红外发射器发射出的红外信号,此时即可判断接触到障碍物,进而实现避障效果。
78.本方案自移动清洁模式中还包括当障碍物检测模块105检测到机器主体100侧部方向上的障碍物时则清洁组件109运动并带动清洁机1进行后退位移或转弯位移,此时控制模块控制障碍物检测模块105来正常检测机器主体100侧部方向上的障碍物,即为周向方向上的障碍物,障碍物检测模块105为包括红外发射器和红外接收器,当机器主体100的侧部方向上有障碍物且遮挡使得红外接收器无法接收到红外发射器发出的红外信号时,此时可以判断存在障碍物,控制模块控制清洁机1进行避开障碍物,进而实现避障效果。
79.其中,碰撞检测模块102和障碍物检测模块105位于机器主体100的侧部,来检测机器主体100的侧部方向上是否存在在障碍物,碰撞检测模块102通过接触碰撞的方式来检测障碍物,障碍物检测模块105通过对距离的检测方式来检测障碍物。
80.机器主体100的外侧设置有碰撞壳,碰撞壳可活动的安装在机器主体100上,当碰
撞壳接触到障碍物时,此时碰撞壳会触发碰撞模块104,实现对障碍物的检测,此为现有技术不再详细叙述;机器主体100的侧部安装障碍物检测模块105,当障碍物与机器主体100的距离较近时,障碍物会触发障碍物检测模块105,实现对障碍物的检测,此为现有技术不再详细叙述。
81.可选地,碰撞检测模块102可以设置为加速传感器,当加速传感器检测到清洁机1位移行走速度突然降低时或者位移行走速度突然停止时,此时判断清洁机1接触到障碍物,可以通过控制清洁组件109运动并带动清洁机1进行后退位移或转弯位移。
82.本方案自移动清洁模式中还包括当地毯检测模块106检测到机器主体100的下侧方向上的地毯时则清洁组件109运动并带动清洁机1进行后退位移或转弯位移,此时控制模块控制地毯检测模块106来正常检测机器主体100的下方是否为地毯,地毯检测模块106可以为红外传感器或超声波传感器,地毯检测为现有技术不再详细叙述,避免清洁机1进入到地毯上导致污染或者打湿地毯,可以在自移动清洁模式下进行有效的避开地毯。
83.上述方案中,在自移动清洁模式中,控制模块控制悬崖模块103、碰撞模块104、障碍物检测模块105、地毯检测模块106正常执行检测功能,实现在自移动清洁模式下的避障处理来确保清洁机1正常行走位移进行拖地清洁。
84.针对清洁组件109的具体运动方式为,清洁组件109设置为可贴合工作面水平旋转的运动结构,且当清洁组件109水平旋转时清洁组件109的底部表面相对工作面具有不均衡的摩擦力使得通过清洁组件109来带动清洁机1在工作面上进行位移,即为清洁组件109的底部表面在贴合到工作面上时形成有不同摩擦力的区域,使得清洁组件109的底部在水平旋转运动中会出现清洁组件109在不同摩擦力的区域作用下进行位移行走,当清洁组件109设置两个时,两个清洁组件109的底部表面上分别均具有不同摩擦力,清洁组件109可以带动清洁机1进行位移行走。
85.本方案中,清洁组件109的数量设置为两个及以上;当清洁组件109的数量设置为两个时则两个清洁组件109呈并列相邻布置结构,且两个清洁组件109的水平旋转方向至少包括相反;可以根据需要设置清洁组件109的数量来进行拖地清洁;优选地,当所述清洁组件109的数量设置为两个时则两个所述清洁组件109呈并列相邻布置结构,且两个所述清洁组件109的水平旋转方向至少包括相反;两个清洁组件109的水平旋转方向相反,有利于两个清洁组件109的共同作用来下带动清洁机1的直线位移行走和转向位移行走,有利于在清洁机1行走过程中保持稳定,实现清洁组件109的部分水平旋转力的抵消但是能通过两个清洁组件109分别与工作面的不均衡摩擦力来实现带动清洁机1进行位移行走。
86.清洁机1上设置两个清洁组件109,并对应设置两个清洁组件109的水平旋转运动方向为从机器主体100的外侧朝向内侧且从上侧朝向下侧且两个清洁组件109均朝向两个清洁组件109之间的方向水平旋转,从清洁机1的底部仰视图来看,左侧的清洁组件109为顺时针的水平旋转方向,右侧的清洁组件109为逆时针的水平旋转方向,左侧的清洁组件109和右侧的清洁组件109的旋转方向均为朝向两个清洁组件109之间的中部位置方向进行水平旋转,这样有利于清洁机1进行直线位移行走和转向位移行走。
87.在自移动清洁模式中,针对清洁机1的后退位移行走,主要为控制两个清洁组件109的水平旋转运动方向切换为反方向水平旋转运动来使得两个反方向水平旋转运动的清洁组件109带动清洁机1进行后退位移,即为在清洁机1直线位移行走的前进状态下,将清洁
组件109的水平旋转方向切换为反向水平旋转,此时可以实现清洁组件109的水平旋转带动清洁机1进行直线位移后退行走,实现清洁机1的后退;当清洁机1设置两个清洁组件109时,将两个清洁组件109的水平旋转方向均切换为反向水平旋转,此时实现清洁机1稳定的直线后退位移行走。
88.在自移动清洁模式中,即为针对清洁机1的转向时,即为清洁机1转弯时,转弯可以为左转弯或右转弯,还可以通过以下方式来实现,当控制其中一个清洁组件109的水平旋转方向切换为与其中另一个清洁组件109的水平旋转方向相同且设置为朝向该其中另一个清洁组件109的方向水平旋转来带动清洁机1朝向该其中另一个清洁组件109方向进行转弯位移,此时通过两个清洁组件109的水平旋转方向设置为同一个方向进行旋转,使得两个清洁组件109水平旋转的力集中朝向一个方向进而能实现清洁机1的转弯,其中,两个清洁组件109的旋转方向为朝向清洁机1需要转弯的方向进行水平旋转;具体地,可以理解为其中一个清洁组件109为左侧清洁组件109,其中另一个清洁组件109为右侧清洁组件109,当清洁机1需要向左侧转弯时,则设置右侧清洁组件109的水平旋转方向切换到与左侧清洁组件109的水平旋转方向一致且左侧清洁组件109和右侧清洁组件109的水平旋转方向为朝向左侧清洁组件109方向进行旋转即为朝向清洁机1的左侧方向进行旋转,且设置为从清洁机1的前侧朝向后侧的方向进行水平旋转,此时可以较好的实现清洁机1的转弯;同样的可以实现清洁机1的右转弯效果,当清洁机1需要向右侧转弯时,则设置左侧清洁组件109的水平旋转方向切换到与右侧清洁组件109的水平旋转方向一致且左侧清洁组件109和右侧清洁组件109的水平旋转方向为朝向右侧清洁组件109方向进行旋转即为朝向清洁机1的右侧方向进行旋转,且设置为从清洁机1的前侧朝向后侧的方向进行水平旋转,此时可以较好的实现清洁机1的转弯。
89.在自移动清洁模式中,针对清洁机1的转向时,即为清洁机1转弯时,转弯可以为左转弯或右转弯,还可以为以下方式,主要通过设置控制其中一个清洁组件109停止运动且其中另一个清洁组件109设置为朝向该其中一个清洁组件109的方向水平旋转运动来带动清洁机1朝向该其中一个清洁组件109方向进行转弯位移,此时通过设置停止该其中一个清洁组件109的水平旋转使得该其中另一个清洁组件109在进行水平旋转产生旋转力实现清洁机1整体进行转向;具体地,可以理解为其中一个清洁组件109为左侧清洁组件109,其中另一个清洁组件109为右侧清洁组件109,当清洁机1需要向左侧转弯时,此时左侧清洁组件109停止水平旋转,右侧清洁组件109处于水平旋转状态且右侧清洁组件109的水平旋转方向为朝向清洁机1左侧方向进行旋转且为从清洁机1的前侧朝向后侧的方向进行水平旋转,使得至少在清洁组件109的旋转力的作用下带动清洁机1进行转向即为左转弯;同样的,当清洁机1需要向右侧转弯时,此时右侧清洁组件109停止水平旋转,左侧清洁组件109处于水平旋转状态且左侧清洁组件109的水平旋转方向为朝向清洁机1右侧方向进行旋转且为从清洁机1的前侧朝向后侧的方向进行水平旋转,使得至少在清洁组件109的旋转力的作用下带动清洁机1进行转向即为左转弯;此时可以较好的实现清洁机1的转弯。
90.本方案中,在自移动清洁模式中,控制其中一个清洁组件109与工作面的摩擦力大于其中另一个清洁组件109与工作面的摩擦力来带动清洁机1朝向该其中另一个清洁组件109方向进行转弯位移;具体为,当两个清洁组件109与地面的摩擦力大小相等时,此时能够使得清洁机1在地面上直线行走来前进或后退,若将其中一个清洁组件109与工作面的摩擦
力增大,此时就打破了清洁机1直线行走的稳定使得清洁机1会进行转弯行走,即为实现对清洁机1的转弯。
91.本方案中,在手持清洁模式中,控制模块在基于悬崖模块103检测到悬空位时或基于碰撞模块104检测或基于障碍物检测模块105检测到机器主体100侧部方向上的障碍物时则控制清洁组件109至少沿当前运动状态下持续运动或停止运动;在手持清洁模式下,用户对清洁机1的操作具有更大的自主性,把手杆101上可以设置启动、暂停等按键,用户可以通过按键来实现对清洁机1的控制;其中,清洁机1内的控制模块会根据悬崖模块103检测到悬空位时或基于碰撞模块104检测或基于障碍物检测模块105检测到机器主体100侧部方向上的障碍物时来控制清洁组件109可以为持续运动,或者可以为停止运动,可以根据用户的使用习惯来设定,或者默认设定为可以为持续运动,给予用户在手持清洁模式下的手动自主操作,方便用户使用。
92.其中,如用户手动提起清洁机1悬空时,此时控制模块可以控制清洁组件109持续水平旋转运动或者停止运动,优选的为清洁组件109停止运动,防止清洁组件109在悬空是水平旋转运动导致出现甩水而污染室内地面的问题;如当障碍物检测模块105或碰撞检测模块102检测到障碍物时,此时控制模块控制清洁组件109持续水平旋转运动,因此时为手持清洁模式,用户可以通过把手杆101来改变清洁机1的位移方向实现避开障碍物。
93.本方案中,在手持清洁模式中,控制模块在基于障碍物检测模块105检测到机器主体100侧部方向上的障碍物时则控制清洁组件109沿障碍物保持恒定距离进行位移沿边清洁,能够在手持清洁模式中更好的通过清洁组件109的水平旋转运动来带动清洁机1沿障碍物的边沿进行沿边清洁,即为沿障碍物的边沿保持恒定的距离来进行位移行走进行拖地清洁,有利于提升对障碍物边沿的清洁效果。
94.本方案中的检测模块102与控制模块电性相连,检测模块102将检测到的检测信号反馈到控制模块内,控制模块根据检测信号来判断清洁机1可启动自移动清洁模式或手持清洁模式,检测模块102设置为红外传感器或霍尔开关或微动开关或极片接触开关或干簧管开关其中的一种。具体地,检测模块102可以安装在机器主体100上,当把手杆101安装到或者拆卸下机器主体100上时会触动检测模块102上的检测信号,此时检测信号被反馈到控制模块内,控制模块据此判断用户将把手杆101安装在位或者从机器主体100上拆卸下把手,此时清洁机1可以根据检测信号来判断可以起到启动手持清洁模式或自移动清洁模式,方便用户根据需要来使用清洁机1进行拖地清洁。当用户需要手动处理地面时只需要安装把手杆101在位时即可来启动手持清洁模式来用清洁组件109进行拖地清洁,实现清洁机1的可适用范围更广。
95.为了方便用户使用,本方案在把手杆101上设置有遥控模块107,当把手杆101未安装于机器主体100上时则可通过把手杆101遥控清洁机1启动自移动清洁模式,遥控模块107主要为红外发射器,当把手杆101未安装在机器主体100上时,此时清洁机1可以位于地面上来进行位移行走执行自移动清洁模式,用户可以通过把手杆101上的遥控模块107来实现对清洁机1的远程遥控开启自移动清洁模式,方便用户使用。
96.同时在机器主体100上设置有感应模块108,感应模块108主要为红外接收器,当检测模块102检测到把手杆101未安装在位时,则感应模块108可检测把手杆101发出的遥控信号并可控制清洁机1启动自移动清洁模式,当检测模块102检测到把手杆101未安装在位,此
时清洁机1可以执行自移动清洁模式,用户通过把手杆101上的遥控模块107可以发射出遥控信号,感应模块108接收到遥控信号后即可启动清洁机1的自移动清洁模式,方便用户远程遥控来启动控制清洁机1进行工作。
97.针对清洁组件109与工作面之间具有不均衡的摩擦力的结构产生来带动清洁机1在地面上位移行走的结构有以下几种方式:
98.第一方式为,清洁组件109的底部表面设置为软性结构;当清洁组件109贴合工作面时清洁组件109呈倾斜结构;清洁组件109的底部表面在贴合工作面时呈倾斜结构使得清洁组件109的底部表面的不同位置与工作面之间有不同的压力,倾斜结构上高的一侧对工作面的压力小,倾斜结构上低的一侧对工作面的压力大,进而实现不同压力下清洁组件109的底部表面对工作面具有不同的摩擦力,且摩擦力为不均衡,同时清洁组件109在水平旋转的过程中基于不均衡的摩擦力实现带动清洁机1的位移行走。
99.具体的倾斜结构可以为,当清洁组件109呈倾斜结构时清洁组件109设置为从所述机器主体100的内侧朝向外侧方向且为由高向低的倾斜结构。即为清洁组件109的底部表面的外沿部分的区域与工作面贴合更为紧密,对工作面的压力大,清洁组件109的底部表面的中部及内沿部分的区域与工作面贴合较为松散,对工作面的压力小,进而实现清洁组件109的底部表面与工作面之间的不均衡摩擦力效果。
100.第二种方式为,清洁组件109的底部表面设置为软性结构;当清洁组件109贴合工作面时清洁组件109的底部表面至少形成第一变形部111和第二变形部112,且第一变形部111的变形量大于第二变形部112的变形量,即为清洁组件109的底部表面上第一变形部111与工作面之间压接更为紧密,第二变形部112与工作面之间压接较为松散,进而形成第一变形部111的变形量较大,第二变形部112的变形量相对第一变形部111的变形量小,实现第一变形部111和第二变形部112与工作面之间具有不均衡的摩擦力,在清洁组件109的水平旋转过程中通过不均衡的摩擦力来带动清洁机1的位移行走效果。
101.可选地,第一变形部111位于清洁组件109的中部以外的区域位置,第二变形部112位于中部以内区域位置;或第一变形部111位于清洁组件109的外沿位置,第二变形部112位于清洁组件109的内沿位置。
102.第三种方式为,机器主体100上设置有压接组件110,当清洁机1位于工作面上且清洁组件109贴合工作面水平旋转时至少压接组件110的一部分接触清洁组件109使得清洁组件109的底部表面相对工作面具有不均衡的摩擦力使得清洁机1进行位移,通过设置压接组件110来对清洁组件109施加压力来使得清洁组件109相对工作面具有不均衡的摩擦力,进而实现清洁组件109带动清洁机1的位移行走;主要为当压接组件110压接清洁组件109时清洁组件109上形成压接区113和清洁区114,通过清洁区114和压接区113来形成清洁组件109的底部表面相对工作面具有不均衡的压力,进而实现清洁机1的自动位移行走,清洁区114和压接区113主要形成在清洁组件109的底部表面上,使得清洁组件109的底部表面形成该两个区域,压接组件110使得清洁组件109的底部表面与工作面之间形成不均衡的压力,进而实现清洁组件109在受力不均衡的情况下能自动行走,可以自动沿受力方向进行位移行走,而取消现有拖地机器人需要设置驱动轮来进行行走的问题,结构简单,成本低,且可靠性高。
103.其中,压接区113相对工作面的最大压强大于清洁区114内相对工作面的最小压
强;当压接组件110接触清洁组件109时压接区113内相对工作面的最大压强大于清洁区114内相对工作面的最小压强,压强为压力与受力面积之比,在本方案具备清洁区114和压接区113的情况下,只需要确保压接区113内存在的最大压强能够大于清洁区114内最小的压强即可确保清洁组件109的底部表面相对工作面具备不均衡的压力,本方案的清洁组件109上,清洁区114的面积要大于压接区113的面积,因清洁区114主要用户大面积的接触工作面进行清洁,压接区113在接触工作面进行清洁的同时还具备相对清洁区114有更大的压力,这样使得压接区113还具备能实现清洁机1自主位移行走的效果。
104.优选地,清洁组件109设置有两个,机器主体100上设置有两个清洁组件109,更有利于清洁机1沿规划路径进行位移行走。
105.具体地结构可以为,机器主体100上设置有压接组件110,压接组件110至少压接两个清洁组件109的一部分;即为压接组件110位于两个清洁组件109之间之间,可以为两个清洁组件109之间距离最小的位置上,只需要满足至少压接组件110的一部分能分别接触两个清洁组件109来进行压接并使得在两个清洁组件109上分别形成压接区113,此时压接组件110不仅可以通过施加压力进而有不均衡的摩擦力来形成压接区113来满足两个清洁组件109能实现清洁机1的位移行走,还能通过压接组件110来实现两个清洁组件109之间不存在漏拖的区域,有利于解决两个清洁组件109之间距离最小的位置处存在漏拖的缝隙的问题,使得清洁机1在清洁工作面的过程中能保持完整的一个单次清洁效果;如果没有压接组件110位于两个清洁组件109之间距离最小位置则会存在两个清洁组件109之间距离最小的位置无法有效的贴合工作面导致存在漏拖缝隙的问题;同时可以通过设置一个压接组件110即可实现对两个清洁组件109的压接施加压力的效果,整体结构相对简单,且压接施加压力的一致性和同步性更好。
106.具体地结构还可以为,两个清洁组件109上分别设置有压接组件110,且两个压接组件110分别压接两个清洁组件109的一部分;即为在两个独立的清洁组件109上分别设置两个独立的压接组件110,即为其中一个压接组件110独立地对其中一个清洁组件109进行压接施加压力,其中另外一个压接组件110独立地对其中另外一个清洁组件109进行压接施加压力,并分别单独在两个清洁组件109上形成单独的压接区113,通过两个单独的压接区113来实现独立实现两个清洁组件109上的分别均匀不均衡的压力,进而形成不均衡的摩擦力,实现在两个清洁组件109下均具有不均衡的摩擦力的情况下来实现清洁机1的位移行走。
107.上述压接组件110的结构可以为,包括压接件,压接件至少部分向下延伸压接接触清洁组件109;通过压接件向下伸出来接触清洁组件109的一部分形成对清洁组件109的施加压力的效果,实现清洁组件109的底部表面与工作面接触的区域内具有不同的压力,进而在水平旋转的时候具有不同的摩擦力,以便通过清洁组件109来实现清洁机1的自动位移行走效果。
108.上述压接组件110的具体结构部分,还可以为压接件至少部分向下延伸压接接触清洁组件109且压接件设置为可活动的结构,压接件上连接有弹性件;将压接件设置为活动的结构,在保持对清洁组件109施加压力的情况下即为对压接区113施加压力的情况下还可以随清洁组件109的波动而调整位置高度,如清洁组件109在不平整的工作面上水平旋转时,可以能受到工作面的影响而出现高低不平的现象,此时弹性件可以起到缓冲受力的效
果;当然本方案的清洁机1大部分时间为在相对较为平整的工作面上来进行拖地清洁,如用户的瓷砖地面上。
109.为了实现压接组件110对清洁组件109施加的压力可以调节,主要为对压接区113施加的压力可以调节,压接组件110还包括调节件,调节件用于调节压接件向下延伸的距离,调节件可以设置电机,并通过电机来带动调节件的上下移动一定的距离,可以将电机旋转的力传递为调节件上下移动的力,当需要增大压接组件110对清洁组件109即为清洁组件109上的压接区113的压力时此时可以通过调节件来调节压接件向下接触清洁组件109的延伸的距离,使得压接件对清洁组件109的压接距离大,即为压接更紧密,此时对应在清洁组件109上的压接区113的压力更大,此时可以通过调节压力的大小来控制清洁组件109贴合工作面的摩擦力,进而通过清洁组件109来调节清洁机1行走的方向,如清洁机1向左转向或者向右转向,对应的来调节两个清洁组件109上的两个压接组件110分别对两个清洁组件109的压接区113上具有不同的压力即可实现,整体结构简单,且代替现有的驱动轮通过不同旋转速度来调整转向的问题。
110.在自移动清洁模式中,当设置有两个清洁组件109上分别设置有压接组件110时,此时可以通过调节控制其中一个清洁组件109与工作面的摩擦力大于其中另一个清洁组件109与工作面的摩擦力来带动清洁机1朝向该其中另一个清洁组件109方向进行转弯位移;具体地为,两个清洁组件109上分别设置有压接组件110,且两个压接组件110分别压接两个清洁组件109的一部分,其中一个压接组件110对其中一个清洁组件109的压力设置为f1,其中另一个压接组件110对其中另一个清洁组件109上的压力设置为f2,当清洁机1朝向该其中一个清洁组件109方向转弯位移时则f1大于f2,当清洁机1朝向该其中另一个清洁组件109方向转弯位移时则f2大于f1,即为实现了清洁机1的转弯位移行走。
111.其中,针对设置有两个清洁组件109的结构下,其中一个压接组件110对其中一个清洁组件109的压力设置为f1,其中另一个压接组件110对其中另一个清洁组件109上的压力设置为f2,可以理解的一种方式为,在两个清洁组件109左右并列分布布置下,就设置有左侧清洁组件109和右侧清洁组件109,并对应设置左侧压接组件110和右侧压接组件110,右侧压接组件110对右侧清洁组件109的压力为f1,左侧压接组件110对左侧清洁组件109的压力为f2;当清洁机1朝向该其中一个清洁组件109方向位移时则f1大于f2,该其中一个清洁组件109可以理解为右侧清洁组件109,当清洁机1朝向该其中另一个清洁组件109方向位移时则f2大于f1,该其中另一个清洁组件109可以理解为左侧清洁组件109,通过调节f1和f2的大小值来对应实现对清洁机1进行转向位移行走,如左转弯行走,或右转弯行走,即为右转弯时则f1大于f2,左转弯时则f2大于f1,实现通过两个清洁组件109上收到压接组件110的压力的调节来对应增大其中一个的压力则清洁机1则因其中一个的压力大则使得压力小的清洁组件109朝向压力大的清洁组件109方向进行位移旋转转向位移行走,通过上述调节即可实现对清洁机1的转向行走,当然也可以运用该方式来调整清洁机1进行直线位移行走,当清洁组件109打滑或出现异常导致位移行走的直线弯曲时或者偏移为斜线时此时可以来矫正回到直线行走方向,可以在机器主体100内安装方向传感器或者角度传感器来实现对清洁机1行走方向的感知,其中,此时压接组件110可以设置为可以活动来压接清洁组件109的结构,方便对压接组件110的压接高度距离或深度距离进行调节,进而实现对压力的调节。
112.针对设置有两个清洁组件109的结构下,当清洁机1沿a方向直线位移行走时则设置至少包括f1值的大小等于f2值的大小,此时有利于清洁机1保持直线位移,可以对应两个清洁组件109上的压接区113设置为在水平方向上或者竖直方向上为对称的结构,这样更有利于清洁机1在进行位移行走的过程中保持稳定性和一致性,有利于清洁机1进行直线行走,可以为直线前进或直线后退进行位移行走。
113.本方案中,当清洁机1沿a方向直线位移行走时,两个清洁组件109上分别相对工作面的合力不相互抵消;即为清洁组件109上清洁区114和压接区113对整个清洁组件109的底部表面相对工作面的合力,两个清洁组件109上分别相对工作面的合力不相互抵消,即为不相等不相反,此时在两个清洁组件109的分别相对工作面的合力作用下使得清洁机1能进行位移移动,且能够进行直线位移行走,此时两个清洁组件109相对工作面的合力可以分别为沿a方向对称来共同推动清洁机1沿a方向行走,并有利于保持直线位移行走。
114.当清洁机1旋转方向位移行走时,如左转弯行走或右转弯行走时,即为当清洁机1旋转方向位移行走时,两个清洁组件109上分别相对工作面的合力矩不相互抵消,使得两个清洁组件109上在各自相对工作面的合力作用下具有各自的力矩即为旋转力或者角力,并对应在各自的合力矩不相互抵消,此时可以实现清洁机1在两个清洁组件109的各自合力矩的共同作用下进行转弯位移行走,即为实现清洁机1的左转弯或右转弯行走。
115.可选地,清洁机1的转弯行走,可以通过设置两个清洁组件109上对应的压接组件110的压力的大小值,并对应形成两个清洁组件109相对工作面的合力矩大小值来实现清洁机1的转弯位移行走;当清洁机1朝向其中一个清洁组件109的方向位移行走时则该其中一个清洁组件109的合力矩大于其中另一个清洁组件109的合力矩,当清洁机1朝向其中另一个拖地组件的方向位移行走时则该其中另一个清洁组件109的合力矩大于该其中一个清洁组件109的合力矩,进而实现对清洁机1的转弯位移行走,具体到可以通过压接组件110对压接区113的压力的大小来实现调节,可以理解为其中一个清洁组件109为左侧清洁组件109,其中另一个清洁组件109为右侧清洁组件109。
116.本方案中,当清洁机1沿a方向直线位移行走时,其中一个清洁组件109上的压接区113的合力与其中另一个清洁组件109上的压接区113的合力大小相等且方向沿a方向对称;即为其中一个清洁组件109上的压接区113相对工作面的合力与其中另一个清洁组件109上的压接区113相对工作面的合力大小相等且方向沿a方向对称,这样使得清洁机1在两个清洁组件109上的分别的压接区113的合力的共同作用下来实现清洁机1沿a方向进行位移行走,且有利于保持清洁机1沿直线位移行走,a方向可以为清洁机1直线位移行走的前进方向或者为清洁机1直线位移行走的后退方向,通过两者的合力作用下能实现清洁机1稳定的直线前行或直线后退。
117.针对本方案中,清洁组件109的结构为,清洁组件109上设置有压盘,压盘下案子拖布,拖布可以通过魔术贴黏贴在压盘上,或者拖布与压盘为一体缝制构造而成,清洁组件109可以拆卸的安装在机器主体100的底部上,并设置为可以水平旋转的结构。
118.本方案中,为了方便用户使用,可以设置提醒用户针对把手杆101的状态提示,具体地,当把手杆101安装在位或拆卸下时,用户可以手动安装把手杆101在位或者手动拆卸下把手杆101,通过在机器主体100上设置语音单元,语音单元可以为蜂鸣器或喇叭,语音单元与控制模块电性相连或与检测模块102电性相连,当检测模块102检测到把手杆101的当
前状态时则机器主体100上的语音单元发出把手杆101的状态切换提示,如把手杆101安装在位,或把手杆101未安装在位,通过语音单元提醒用户当前把手杆101的状态,已经把手杆101的状态被切换时的切换提示,方便用户及时知晓来启动自移动清洁模式或手持清洁模式;或显示单元显示出把手杆101的状态切换提示,即为设置显示灯珠或显示屏来对把手杆101的状态进行显示,提醒用户当前把手杆101的状态或把手杆101的切换状态的切换提示;或清洁组件109持续间歇运动来发出把手杆101的状态切换提示,即为通过清洁组件109的运动状态来提醒用户,如把手杆101被安装在位时或被拆卸下时清洁组件109间歇的运动,即为间歇变换启动水平旋转运动和停止水平旋转运动这样持续多次间隙运动来提醒用户当前在针对把手杆101进行安装或拆卸,当把手杆101安装在位或把手杆101未安装在位时,此时清洁组件109可以持续水平旋转运动来拖地清洁。
119.针对本方案的清洁机1上的清洁组件109进行清洗,本方案设置还包括清洗装置115,清洗装置115用于放置清洁机1来对清洁组件109进行清洗;清洗装置115上设置有容液腔,当清洁机1放置在清洗装置115上时清洁组件109位于容液腔;清洗装置115相对清洁机1为独立的结构部分来方便用户将清洁机1放置到清洗装置115来对清洁组件109进行清洗,可以利用清洁组件109自身的运动来进行对清洁组件109的清洗,针对容液腔,容液腔设置为凹陷的结构,可以直接在容液腔内放置清洗液即清水,清洁组件109直接接触清洗液来进行实现清洁组件109的清洗,清洁组件109在接触清洗液时并启动自身的运动结构实现清洁组件109清洗的动力。
120.针对容液腔内进行清洁组件109的清洗,还可以设置供液模块来对清洁组件109进行供给清洗液,通过供给清洗液实现清洗液接触清洁组件109后并利用清洁组件109自身的运动动力来实现其清洗效果,供液模块可以为电磁阀、水泵等,只需要满足启动供液模块可实现清洁组件109来接触清洗液进行清洗。
121.为了解决清洁组件109在湿润状态下容易发霉、发臭的问题,本方案的清洗装置115上还可以设置有烘干模块当清洁机1放置在清洗装置115上时烘干模块位于清洁组件109的一侧来对清洁组件109进行烘干,烘干装置主要通过发热来对清洁件进行烘干处理,有效的解决清洁组件109在湿润状态下会发臭、发霉的问题。
122.工作原理:本方案的清洁机1能够通过清洁组件109的自身运动与地面之间具有不均衡的摩擦力使得通过清洁组件109的运动来带动清洁机1的位移行走,可以带动清洁机1进行前进、后退、转弯位移,清洁机1的机器主体100不需要设置驱动轮即可实现清洁机1的位移行走,整体结构简单且成本更低,同时设置可拆卸的把手杆101,来清洁机1可以作为手持式的清洁机1来进行使用,使得清洁机1具备多功能的使用效果,具体地为清洁机1设置自移动清洁模式和手持清洁模式,并通过检测模块102来进行针对把手杆101是否在位的检测,用于可以根据检测结果来实现清洁机1在室内地面执行自移动清洁模式或者用户手动操作下进行拖地清洁的手持清洁模式,方便用户对清洁机1进行切换使用,手持清洁模式下可以针对清洁机1无法自主行走到的区域进行清洁,或者根据用户的需求来手动操作进行手持清洁模式,提升了清洁机1的可拖地的适用范围,方便用户使用。
123.本领域的普通技术人员可以理解,上述各实施方式是实现本发明的具体实施例,而在实际应用中,可以在形式上和细节上对其作各种改变,而不偏离本发明的精神和范围,均在本发明的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。