1.本发明涉及机器人技术领域,具体为一种机器人自动更换电池系统和方法。
背景技术:
2.机器人是一种可以自动执行工作的机器装置,如扫地机器人可以实现自动扫地,搬运机器人可以实现自动搬运。为了实现自身的移动,机器人一般包含有动力装置。现有的动力装置绝大多数都是蓄电池,如锂电池。蓄电池在电能消耗完毕后要进行充电,一般有如下几种充电方式:人工手动给机器人插上电进行充电;人工将机器人上面的蓄电池拿下来充电,同时给机器人换上之前充满电的蓄电池;或者机器人自己移动到充电座上进行插电充电。这些充电方式有如下问题:在没有人工干预的情况下,机器人只能自行移动进行整机充电,充电时候无法工作,只能等待充电完成,造成时间上的浪费。
技术实现要素:
3.本发明的目的在于提供一种机器人自动更换电池系统,以解决上述背景技术中提出的机器人只能整机充电的问题。
4.为实现上述目的,本发明提供如下技术方案:一种机器人自动更换电池系统,包括机器人和配套的电池柜,所述机器人上安装有行走动力机构,所述机器人的侧壁开设有电池槽,且电池槽的内部设置有电池包,电池包的两侧设置有连接头,所述电池槽内设置有第一推出机构和第一电池连接座;
5.电池柜内设置有多个的充电槽,多个的充电槽等高设置,充电槽用于容置所述电池包,每个充电槽内设置有第二推出机构和第二电池连接座,所述机器人上设置有用于检测充电槽的位置传感器和用于通信的第一通信模块,所述机器人上设置有第一控制器和附属电源,所述电池柜设置有第二控制器和第二通信模块,所述第一控制器与所述行走动力机构、所述第一通信模块和第一推出机构连接,所述第二控制器与所述第二通信模块、第二电池连接座和第二推出机构连接,所述第一通信模块与所述第二通信模块进行通信连接,电池包的一连接头插入第一电池连接座后给机器人提供电力,附属电源在电池包的连接头与第一电池连接座断开时给机器人提供电力,电池包的另一连接头插入第二电池连接座后第二控制器控制第二电池连接座给电池包充电。
6.进一步地,所述第一推出机构或者第二推出机构为电动伸缩杆;或者:
7.所述第一推出机构或者第二推出机构包括转动电机、齿轮和齿条,所述齿轮设置在转动电机的顶端,所述齿条设置在所述电池包的侧壁。
8.进一步地,所述机器人还包括电控门,电控门设置在所述电池槽的开口处。
9.进一步地,电池包两侧的连接头在所在侧面的位置相同,且连接头所在的两个侧面结构相同。
10.进一步地,所述电池包的一侧面设置有两个连接头,两个连接头相对于电池包的该侧面中心为中心对称,且电池包的侧面为中心对称。
11.进一步地,充电槽或者电池槽侧壁设置有电动卡位机构,所述电池包的侧面对应设置有卡槽,所述电动卡位机构用于在电池包置于充电槽或者电池槽后通过卡槽卡住电池包。
12.进一步地,所述电池包的上下表面上、所述充电槽的内部上下表面上或者所述电池槽的内部上下表面上设置有滚轮。
13.进一步地,所述机器人为智能扫地机器人,所述机器人的底部安装有电动刷子。
14.进一步地,所述电池包为方体型。
15.本发明提供一种机器人自动更换电池方法,包括如下步骤:
16.机器人通过位置传感器检测空闲的充电槽的位置,并驱动行走动力机构运行到机器人的电池槽与空闲的充电槽对位的位置;
17.机器人驱动第一推出机构将电池包从电池槽内推出并推到充电槽内;
18.机器人通过位置传感器检测已充电电池包的充电槽的位置,并驱动行走动力机构带动机器人的电池槽与已充电电池包的充电槽对位的位置;
19.机器人与电池柜进行通信,电池柜驱动第二推出机构将已充电电池包从充电槽内推出并推到电池槽内。
20.与现有技术相比,本发明的有益效果是:通过第一推出机构,可以从机器人上将需要充电的电池包推到电池柜中,然后从电池柜上可以将已充满电的电池包推到机器人上,而后通过附属电源可以实现机器人的移动,实现了机器人的电池包更换。
附图说明
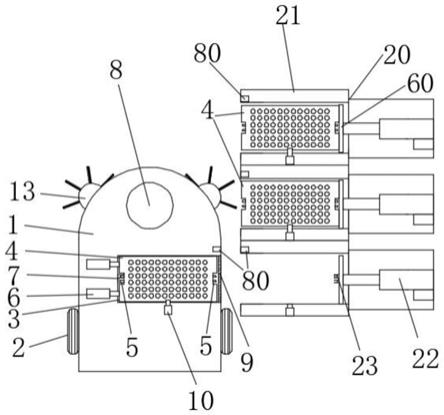
21.图1为本发明俯视剖视结构示意图;
22.图2为本发明的单元模块结构示意图;
23.图3为本发明电池包从机器人推出的结构示意图;
24.图4为本发明侧视剖视的结构示意图;
25.图5为本发明电池包从机器人推出的侧视剖视结构示意图;
26.图6为本发明机器人移动后的结构示意图;
27.图7为本发明机器人装入电池包后的结构示意图;
28.图8为本发明电池包的结构示意图;
29.图9为本发明另一实施例侧视剖视的结构示意图。
30.图中:1、机器人;2、行走动力机构;3、电池槽;4、电池包;5、连接头;6、第一推出机构;7、第一电池连接座;8、位置传感器;9、电控门;10、电动卡位机构;11、卡槽;
31.20、电池柜;21、充电槽;22、第二推出机构;13、电动刷子;60、推板。
具体实施方式
32.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
33.请参阅图1
‑
图9,本发明提供的一种实施例:一种机器人自动更换电池系统,包括
机器人1和配套的电池柜20,所述机器人上安装有行走动力机构2,行走动力机构2用于带动机器人行走,如可以是电机和与电机连接的车轮或者机械腿等。所述机器人1的侧壁开设有电池槽3,且电池槽的内部设置有电池包4,电池包4的两侧设置有连接头5,优先地,两个连接头分别设置在靠近电池槽3底部的一侧和远离电池槽3底部的一侧。所述电池槽3内设置有第一推出机构6和第一电池连接座7。
34.电池柜20内设置有多个的充电槽21,多个的充电槽等高且相同设置,充电槽用于容置所述电池包4,每个充电槽内设置有第二推出机构22和第二电池连接座23,所述机器人上设置有用于检测充电槽的位置传感器8和用于通信的第一通信模块,所述机器人上设置有第一控制器(如单片机)和附属电源,所述电池柜20设置有第二控制器(如单片机)和第二通信模块,所述第一控制器与所述行走动力机构、所述第一通信模块和第一推出机构连接,所述第二控制器与所述第二通信模块、第二电池连接座和第二推出机构连接,所述第一通信模块与所述第二通信模块进行通信连接,电池包的一连接头插入第一电池连接座后给机器人提供电力,附属电源在电池包的连接头与第一电池连接座断开时给机器人提供电力,电池包的另一连接头插入第二电池连接座后第二控制器控制第二电池连接座给电池包充电。本发明的附属电源可以是小的蓄电池,在某些实施例中,也可以是设置在机器人和电池柜或者电池柜附近地面上的无线供电模块。附属电源用于在更换电池时给第一控制器、位置传感器、第一通信模块和行走动力机构供电,优选的情况为不能用于作业模块(电动刷子、吸尘模块、喷水模块等)供电,即在更换电池时需要完成电池更换后才能进行相关作业。当然在电池进行更换前应该检测附属电池电量足够时才能进行更换电池工作。
35.本发明在使用时,首先机器人1第一控制器通过第一电池连接座7检测电池包的电量即将耗尽后,机器人1的第一控制器通过位置传感器8检测电池柜20并驱动行走动力机构2,将机器人开到与电池柜20平行位置,如图3所示。此时,电池槽与充电槽应当是等高的。而后机器人的第一推出机构将即将耗电完的电池包推到电池柜的没有电池包的充电槽内,如图4所示,此时电池柜给充电槽的电池包进行充电。推出时电池包与第一电池连接座7断开连接,由附属电源供电。而后机器人通过附属电源供电再往电池柜的其他充电槽移动,如图5所示,移动到充满电电池包的电池槽前面。机器人可以通过第一通信模块与电池柜交互知道哪个电池槽内有充满电的电池包。或者电池包或者电池槽前面设置有充满电标识,机器人通过检测充满电标识来知道哪个电池槽内有充满电的电池包。是否充满电可以通过检测第二电池连接座的电压来获得。最后机器人的第一控制器通过第一通信模块与第二通信模块通信,告知电池柜的第二控制器控制第二推出机构将电池包推出到机器人的电池槽底部,如图6所示。这样就完成了机器人的电池包更换。推入后,电池包给机器人供电,同时也可以给附属电源充电。
36.上述实施例中,位置传感器8用于检测电池柜和充电槽的位置,所述位置传感器可以为视觉传感器(如摄像头成像)、激光传感器(如图1所示)、碰撞传感器或者红外传感器。位置传感器8也可以用于机器人行走时的位置检测。在某些实施例中,位置传感器还可以是(或者包含)设置在机器人侧面和充电槽侧面专门用于对位的对位传感器80(如光电传感器、磁传感器等),这样通过对位传感器对位,可以实现每个充电槽与电池槽的精准对位。
37.第一推出机构6或者第二推出机构22都是用于将电池包推出的机构,是电控的推出机构。在某些实施例中,所述第一推出机构或者第二推出机构为电动伸缩杆。电动伸缩杆
可以是电机转动驱动伸缩杆、电动液压伸缩杆或者电动气动伸缩杆,电动伸缩杆可以安装在电池包的侧边或底部,只要能将电池包推出即可。为了避免电池包推出时角度改变或者卡住,所述电动伸缩杆的一端安装有推板60,推板60增加了与电池包侧壁的接触面,使得电池包可以被正确推出。
38.在某些实施例中,第一推出机构6或第二推出机构22可以是齿轮咬合的形式,具体地,所述第一推出机构6或者第二推出机构22包括转动电机、齿轮和齿条,所述齿轮设置在转动电机的顶端,所述齿条设置在所述电池包的侧壁。通过启动转动电机来带动齿轮进行旋转,且通过齿轮和齿条相互啮合,使齿轮在旋转的同时可以通过齿条来带动电池包在电池槽或者充电槽的内部进行移动,从而便于机器人通过启动转动电机来将电池包从电池槽的内部移出,从而便于机器人从侧边来更换电池包。
39.电池包放在电池槽内后,为了避免磕碰,可以在电池槽开口加个电控门9。第一控制器与电控门连接。在电池包需要更换时,第一控制器控制电控门打开,更换完毕,第一控制器控制电控门关闭。电控门可以关闭的时候正好贴住电池包的侧壁,这样还可以避免电池包的连接头受震动时从第一电池连接座上脱出。当然,电控门也可以设置在充电槽开口处。某些实施例中,也可以通过电动卡位机构10卡住电池包,避免电池包脱出。具体地,充电槽或者电池槽侧壁设置有电动卡位机构10,所述电池包的侧面对应设置有卡槽11,所述电动卡位机构用于在电池包置于充电槽或者电池槽后通过卡槽卡住电池包。在电池进行更换的时候,第一控制器要控制电动卡位机构10收缩,而后再控制第一推出机构推出电池包。在电池包更换过程中,电动卡位机构保持收缩,知道电池包与电池槽的第一电池连接座连接或者与充电槽的第二电池连接座连接。
40.由于本发明的电池包即是可供电和充电的,为了让电池包两侧面即可以与第一电池连接座连接,又可以与第二电池连接座连接,电池包两侧的连接头在所在侧面的位置相同,且连接头所在的两个侧面结构相同。当然,电池槽和充电槽的结构也需要相同,第一电池连接座和第二电池连接座的结构也需要相同。这样就无需区分两个连接头的位置和结构,任意一个连接头都可以使用。
41.进一步地,为了避免区分上下面,使得电池包正放或者倒放都可以使用,如图8所示,所述电池包的一侧面设置有两个连接头5,两个连接头相对于电池包的该侧面中心为中心对称(极性也是中心对称),且电池包的侧面为中心对称。这样上下任意放置时,电池包在上面的连接头其正负极都是一致的,直接可以与电池包适配的第一电池连接座或与电池包适配的第二电池连接座连接。优选地,电池包的截面(平行于连接头所在侧面)是方形,即电池包是方体型,这样便于堆放和设置。
42.进一步地,所述电池包的上下表面上、所述充电槽的内部上下表面上或者所述电池槽的内部上下表面上设置有滚轮12。通过滚轮减少摩擦力,避免电池包与充电槽或者电池槽之间的磨损,减少阻力,便于推出。在某些实施例中,滚轮可以同时设置在电池包、充电槽和电池槽内,滚轮也可以是滚珠。
43.本发明并不限定机器人的形态,在某些实施例中,所述机器人为智能扫地机器人,所述机器人的底部安装有电动刷子13。通过电动刷子可以实现扫地功能。
44.本发明提供一种机器人自动更换电池方法,包括如下步骤:机器人通过位置传感器检测空闲的充电槽的位置,并驱动行走动力机构运行到机器人的电池槽与空闲的充电槽
对位的位置;机器人驱动第一推出机构将电池包从电池槽内推出并推到充电槽内;机器人通过位置传感器检测已充电电池包的充电槽的位置,并驱动行走动力机构带动机器人的电池槽与已充电电池包的充电槽对位的位置;机器人与电池柜进行通信,电池柜驱动第二推出机构将已充电电池包从充电槽内推出并推到电池槽内。通过上述方法,实现了机器人的电池包的自动更换。本发明的方法可以应用于上述的系统上。
45.上述所有实施例中,所述第一通信模块和第二通信模块为互联网连接模块(如wifi模块、4g、5g模块或者物联网模块等)、蓝牙模块或者nfc通信模块。可以实现第一控制器与第二控制器的直接通信或者通过互联网进行通信。
46.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

