1.本发明涉及扫地机器人技术领域,特别涉及一种集尘盒和应用该集尘盒的扫地机器人。
背景技术:
2.随着生活水平的提高,扫地机器人已经被越来越多的应用于家庭清洁作业中。扫地机器人工作时,扫地机器人内的风机转动,以形成负压,将地面上的杂物吸入到集尘盒内。常见地,集尘盒的进风口和出风口分别设于集尘盒的相对两个壁面,风机连通出风口,当风机工作时,风机转动产生的声音易直接通过盒体进风口和出风口传出,使得扫地机器人工作时产生的噪声较大。
技术实现要素:
3.本发明的主要目的是提出一种集尘盒,旨在减少扫地机器人产生的噪声。
4.为实现上述目的,本发明提出的集尘盒包括:盒体,所述盒体内设置有集尘腔和吸风腔、以及连通所述集尘腔和所述吸风腔的过风口;
5.所述盒体还设置有连通所述集尘腔的集尘口、以及连通所述吸风腔的吸风口,所述吸风口和所述集尘口设于所述盒体的同一侧。
6.在本发明的一实施例中,定义竖直于地面的方向为上下方向,所述吸风腔和所述集尘腔沿所述盒体的上下方向层叠设置。
7.在本发明的一实施例中,所述吸风口和所述集尘口沿所述盒体的上下方向层叠排布。
8.在本发明的一实施例中,所述盒体具有相对设置的前表面和后表面,所述吸风口和所述集尘口均开设于所述盒体的前表面。
9.在本发明的一实施例中,所述过风口在所述盒体的前后方向上与所述集尘口之间具有间隔,所述集尘盒还包括过滤芯,所述过滤芯盖合于所述过风口。
10.在本发明的一实施例中,所述盒体包括:
11.底壳,所述底壳设置有所述集尘腔、所述过风口及所述集尘口;及
12.上盖,所述上盖与所述底壳连接,并围合形成所述吸风腔,所述吸风腔邻近所述集尘口的壁面开设有所述吸风口。
13.在本发明的一实施例中,所述上盖包括盖体和盖板,所述盖体与所述底壳连接,并围合形成所述吸风腔,所述盖体对应所述过风口设置有安装孔,所述盖板可拆卸地设于所述安装孔,所述盖板对应所述过滤芯凸设有限位筋,所述限位筋与所述过滤芯抵接;
14.在本发明的一实施例中,所述底壳包括壳体、遮挡板及扣紧件,所述壳体设置有所述集尘腔、所述过风口及所述集尘口,所述壳体还设置有避位口,所述避位口与所述集尘口相对设置,所述遮挡板可转动地设于所述壳体,并位于所述避位口,所述扣紧件设于所述壳体,并邻近所述避位口设置,所述扣紧件用于扣紧所述遮挡板。
15.本发明还提出一种扫地机器人,包括机器人本体、风机以及所述集尘盒,所述集尘盒设于所述机器人本体,所述风机与所述吸风口连通。
16.在本发明的一实施例中,所述扫地机器人包括弹性胶圈,所述弹性胶圈位于所述集尘盒和所述风机之间,并密封所述吸风口。
17.本发明技术方案通过在盒体内设置有集尘腔和吸风腔、以及连通所述集尘腔和所述吸风腔的过风口,同时,在盒体上设置有吸风口和集尘口,吸风口和集尘口设于所述盒体的同侧。即是,盒体内形成有相互连通的集尘腔和吸风腔,且连接两个腔室的吸风口和集尘口设于盒体的同一侧,集尘腔和吸风腔形成的流道为一折弯的流道,当风机转动后,风机产生的声音传送到流道内,被流道内的集尘腔和吸风腔的内壁面反射和/或散射,以减少声音直接从集尘口传出;同时,由于所述吸风口和所述集尘口设于盒体的同一侧,使得流道的布局为自吸风口进入盒体内,再从集尘口导出,以增长流道的长度,增长噪声的传递距离,进而减少噪声的传出。
附图说明
18.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图示出的结构获得其他的附图。
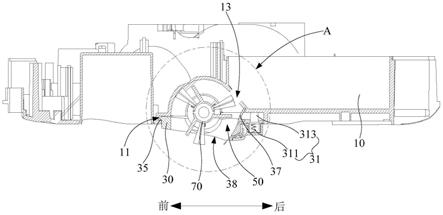
19.图1为本发明扫地机器人一实施例的结构示意图;
20.图2为本发明集尘盒一实施例的结构示意图;
21.图3为图2中沿i-i方向的截面示意图;
22.图4为图2中集尘盒与风机的装配结构示意图;
23.图5为图4中沿ii-ii方向的截面示意图。
24.附图标号说明:
25.标号名称标号名称1盒体137遮挡板12弹性胶圈138扣紧件13底壳14上盖131集尘腔141吸风腔132吸风口142盖体133集尘口143安装孔1331进风端144盖板1332出风端145限位筋134让位槽15过滤芯135过风口2风机136壳体3机器人本体1361避位口
ꢀꢀ
26.本发明的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
具体实施方式
27.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
28.需要说明,若本发明实施例中有涉及方向性指示(诸如上、下、左、右、前、后
……
),则该方向性指示仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
29.另外,若本发明实施例中有涉及“第一”、“第二”等的描述,则该“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。另外,全文中出现的“和/或”的含义为,包括三个并列的方案,以“a和/或b为例”,包括a方案,或b方案,或a和b同时满足的方案。另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本发明要求的保护范围之内。
30.本发明提出一种集尘盒。具体参考图1,为本发明扫地机器人一实施例的结构示意图;参考图2,为本发明集尘盒一实施例的结构示意图;参考图3,为图2中沿i-i方向的截面示意图;参考图4,为图2中集尘盒与风机的装配结构示意图;参考图5,为图4中沿ii-ii方向的截面示意图。
31.在本发明实施例中,如图1所示,并结合图2、图3、图4及图5所示,该集尘盒,包括:盒体1。其中,盒体1内设置有集尘腔131和吸风腔141、以及连通集尘腔131和吸风腔141的过风口135;盒体1还设置有连通集尘腔131的集尘口133、以及连通吸风腔141的吸风口132,吸风口132和集尘口133设于盒体1的同一侧。在本实施例中,吸风口132与风机2相连,风机2产生负压,集尘口133周围的空气被吸入,以在集尘腔131和吸风腔141内形成气流。
32.也就是说,如图3和图5所示,在盒体1内设置有连通的集尘腔131和吸风腔141,并将连通集尘腔131和吸风腔141的吸风口132和集尘口133设于盒体1的同一侧;可认为,集尘腔131和吸风腔141为并行设置,吸风口132和集尘口133为相邻或相对设置在盒体1的同一侧。即是,气流从集尘口133进入集尘腔131,依次经过过风口135和吸风腔141后,从吸风口132吹出,空气依次进入集尘腔131和吸风腔141,可增加气流的流动长度,气流经由两个腔室分担风压后吹出,减少噪声的产生。同时,风机2产生的噪音经由两个腔室内壁面的散射和/或反射后,减少从吸尘口传出的噪音。
33.在本实施例中,通过在盒体1内设置有集尘腔131和吸风腔141、以及连通集尘腔131和吸风腔141的过风口135,同时,在盒体1上设置有吸风口132和集尘口133,吸风口132和集尘口133设于盒体1的同侧。即是,盒体1内形成有相互连通的集尘腔131和吸风腔141,且连接两个腔室的吸风口132和集尘口133设于盒体1的同一侧,集尘腔131和吸风腔141形成的流道为一折弯的流道,当风机2转动后,风机2产生的声音传送到流道内,被流道内的集尘腔131和吸风腔141的内壁面反射和/或散射,以减少声音直接从集尘口133传出;同时,由于吸风口132和集尘口133设于盒体1的同一侧,使得流道的布局为自吸风口132进入盒体1内,再从集尘口133导出,以增长流道的长度,增长噪声的传递距离,进而减少噪声的传出。
34.可选地,盒体1可为一体结构,即是,盒体1可为塑胶材质,通过一体注塑工艺形成盒体1,以提高盒体1自身的结构强度。
35.可选地,盒体1也可包括多个壳部组成的结构;其中,以盒体1包括两个壳部为例,两个壳部分别为底壳13和上盖14。底壳13或上盖14二者之一可设置有集尘腔131和过风口135,底壳13和上盖14连接后形成吸风腔141,过风口135位于底壳13和上壳之间,以连通集尘腔131和吸风腔141。其中,壳部可为塑胶材质,也可为金属材质。
36.在本发明的一实施例中,吸风口132和集尘口133为相邻或相对设置在盒体1的同一侧,可以理解地,以壳体136的中部平分线为基准线,吸风口132和集尘口133设置在基准线的一侧。即是,吸风口132和集尘口133可同时位于盒体1的一个表面上;或者,吸风口132和集尘口133可分别位于盒体1的相邻两个表面上;或者,吸风口132和集尘口133可分别位于盒体1的相对两个表面上。
37.可选地,吸风腔141和集尘腔131为并行设置。即是,以竖直与地面的方向为上下方向,平行于地面的方向为前后方向或左右方向,吸风腔141和集尘腔131呈上下方向设置,或,吸风腔141和集尘腔131呈前后方向设置,或吸风腔141和集尘腔131呈左右方向。在盒体1可设置在扫地机器人,且可与风机2连通的前提下,不限定集尘腔131和吸风腔141的排布。
38.可选地,集尘盒设置在扫地机器人内时,上下方向为集尘盒竖直于地面的方向,吸风腔141和集尘腔131沿盒体1的上下方向层叠设置。即是,风机2可与集尘盒并排设置,且风机2与吸风口132连通。
39.在本发明的一实施例中,如图3所示,定义竖直于地面的方向为上下方向,吸风腔141和集尘腔131沿盒体1的上下方向层叠设置。其中,吸风腔141位于集尘腔131远离地面的一侧,以减少集尘腔131内尘埃进入到吸风腔141的几率,提高扫地机器人的工作稳定性。
40.在本发明的一实施例中,如图3所示,吸风口132和集尘口133沿盒体1的上下方向层叠排布。即是,吸风口132和集尘口133可同时位于盒体1的一个表面上,且吸风口132和集尘口133上下方向层叠排布;或者,吸风口132和集尘口133可分别位于盒体1的相邻两个表面上,两个表面可为侧面和面向地面的下表面,或两个表面可为侧面和背向地面的上表面,且吸风口132和集尘口133上下方向层叠排布;或者,吸风口132和集尘口133可分别位于盒体1的相对两个表面上,相对两个表面可为面向地面的下表面和背向地面的上表面。
41.在本发明的一实施例中,如图3所示,盒体1具有相对设置的前表面和后表面,吸风口132和集尘口133均开设于盒体1的前表面。在本实施例中,可认为吸风口132和集尘口133同设于盒体1的其中一侧的表面,吸风口132和集尘口133呈上下层叠排布,将吸风口132和集尘口133设于盒体1的一侧面,以便于风机2的安装,同时,可减小扫地机器人整体的厚度。
42.在本发明的一实施例中,吸风口132和集尘口133设置在基准线的一侧,过风口135可设于盒体1的另一侧。即是,集尘口133、集尘腔131、过风口135、吸风腔141及吸风口132依次形成流道,以有效延长流道的长度。
43.在本发明的一实施例中,如图3所示,过风口135在盒体1的前后方向上与集尘口133之间具有间隔,集尘盒还包括过滤芯15,过滤芯15盖合于过风口135。
44.在本实施例中,将过滤芯15盖合于过风口135,以减少尘埃和水汽进入到吸风腔141的概率,以有效保护风机2和其他零部件。
45.在本发明的一实施例中,如图3和图5所示,集尘腔131的内壁面凹陷形成让位槽
134,让位槽134邻近集尘口133设置;集尘口133包括进风端1331和出风端1332,进风端1331外露于盒体1,出风端1332朝向让位槽134设置。
46.在本实施例中,集尘口133朝向让位槽134设置,以使得尘埃吸入到集尘腔131时,尘埃冲撞在让位槽134,使得尘埃沉积在集尘腔131底部,避免尘埃直接从过风口135通过。
47.在本发明的一实施例中,如图2和图3所示,盒体1包括:底壳13和上盖14;底壳13设置有集尘腔131、过风口135及集尘口133;上盖14与底壳13连接,并围合形成吸风腔141,吸风腔141邻近集尘口133的壁面开设有吸风口132。
48.在本实施例中,采用相对分离的底壳13和上盖14,以减少制成盒体1的难度;同时,当底壳13或上盖14任意一个损坏时,还可单独更换,以降低维护的难度。
49.可选地,吸风口132设于盖体142或底壳13。
50.在本发明的一实施例中,如图2和图3所示,上盖14包括盖体142和盖板144,盖体142与底壳13连接,并围合形成吸风腔141,盖体142对应过风口135设置有安装孔143,盖板144可拆卸地设于安装孔143,盖板144对应过滤芯15凸设有限位筋145,限位筋145与过滤芯15抵接;
51.在本实施例中,采用上盖14包括盖体142和盖板144的结构,盖板144可相对与盖体142张开或闭合,以便于人工更换过滤芯15。
52.可选地,盖板144与盖体142之间可为卡扣连接。或,盖板144可盖体142之间可为转轴连接。
53.可选地,吸风口132设于盖体142。
54.在本发明的一实施例中,如图2和图3所示,底壳13包括壳体136、遮挡板137及扣紧件138,壳体136设置有集尘腔131、过风口135及集尘口133,壳体136还设置有避位口1361,避位口1361与集尘口133相对设置,遮挡板137可转动地设于壳体136,并位于避位口1361,扣紧件138设于壳体136,并邻近避位口1361设置,扣紧件138用于扣紧遮挡板137。
55.在本实施例中,采用在壳体136上设置有遮挡板137和扣紧件138,使得遮挡板137可相对于壳体136张开或闭合,以使得避位口1361敞开或关闭,以有效地清理集尘腔131内的灰尘。其中,在壳体136上设置有扣紧件138,以通过扣紧件138锁紧遮挡板137,避免遮挡板137松脱。
56.本发明还提出一种扫地机器人,结合图1和图4所示,该扫地机器人包括机器人本体3、风机2以及集尘盒,该集尘盒的具体结构参照上述实施例,由于本扫地机器人采用了上述所有实施例的全部技术方案,因此至少具有上述实施例的技术方案所带来的全部有益效果,在此不再一一赘述。其中,所述集尘盒设于所述机器人本体3,所述风机2与所述吸风口132连通。
57.在本实施例中,所述机器人本体3设置有容置腔,所述风机2和集尘盒设置在容置腔内,风机2与集尘盒的吸风口132连通。为了便于拆卸集尘盒,所述机器人本体3还设置有连通容置腔的拆装孔。
58.在本发明的一实施例中,结合图5所示,所述扫地机器人包括弹性胶圈12,所述弹性胶圈12位于所述集尘盒和所述风机2之间,并密封所述吸风口132。
59.在本实施例中,采用弹性胶圈12连接所述集尘盒和所述风机2,以增强风机2与集尘盒之间的连接强度,避免灰尘泄露,导致电路元器件损坏。
60.以上所述仅为本发明的可选实施例,并非因此限制本发明的专利范围,凡是在本发明的创造构思下,利用本发明说明书及附图内容所作的等效结构变换,或直接/间接运用在其他相关的技术领域均包括在本发明的专利保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。