1.本发明涉及智慧可调光路灯监控技术,具体涉及一种基于无线传感网自适应 调光智慧路灯监控系统及方法。
背景技术:
2.路灯是城市道路照明的重要组成部分,随着智慧城市的发展、城市道路的扩 建及人们的出行需求,各地区城市道路路灯的数量以直线速度递增。而在城市的 偏远街道,每天的人流量和车流量相对稀少,此时,如果每天路灯仍然使用恒光 照明,势必会造成不必要的电力资源的浪费,长此以往,对路灯的寿命也会有不 小的损耗。然而,当前绝大部分城市地区的路灯开关控制方式仍然采用人工手动、 定时开关和感应式控制的3种方式。其中采用手动控制方式容易造成电能浪费及 照明智能化程度偏低的问题。依据不同时间段的人流量与车流量定时控制调光等 级的方式尽管提高了节能效果,但仍然具有很大的提升空间。与前2种控制方式 相比,感应式控制方法结合了光控和车流量感应,照明智能化程度有所提高,但 由于调光等级单一,电能存在不同程度的浪费。
3.智慧城市路灯监控系统的意义不仅在于响应智慧城市的号召,在一定程度上 节约城市运行成本,更重要的是能够通过先进的技术和设计理念提高城市管理和 服务水平,为打造绿色生态高科技的宜居环境做出贡献。
技术实现要素:
4.本发明的目的在于提供一种基于无线传感网自适应调光智慧路灯监控系统 及方法,用以解决现今路灯浪费人力、操作繁琐且浪费能源等问题。
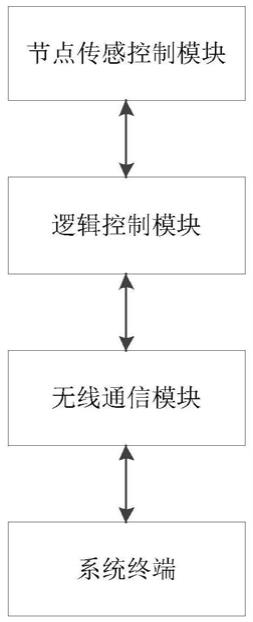
5.实现本发明目的的技术方案为:一种基于无线传感网自适应调光智慧路灯监 控系统,包括路灯节点传感控制模块、逻辑控制模块、无线通信模块和系统终端;
6.路灯节点传感控制模块安装于路灯灯杆,用于控制路灯调光和采集电量、光 强、交通流量信息,并将采集的信息发送到逻辑控制模块;
7.逻辑控制模块收到上传的数据后,通过无线通信模块发送给系统终端,系统 终端采用调光算法对上传的数据分析处理后,将处理结果反馈给路灯节点传感控 制模块并对路灯进行调光并将相关信息显示在系统界面上,如果是故障信息,则 系统会发出定位信息。
8.一种基于无线传感网自适应调光智慧路灯监控方法,包括如下步骤:
9.路灯节点传感控制模块采集路灯节点电量、光强、交通流量信息,并将采集 的信息发送到逻辑控制模块;
10.逻辑控制模块收到上传的数据后,通过无线通信模块发送给系统终端;
11.系统终端采用调光算法对上传的数据分析处理后,将处理结果反馈给路灯节 点传感控制模块并对路灯进行调光并将相关信息显示在系统界面上,如果是故障 信息,则系统会发出定位信息;所述调光算法为改进的基于k-means 和支持向 量机的自适应调光路
灯照明算法,算法包括:
12.步骤s101,系统终端首先进行初始化;
13.步骤s102,输入并读取待调光路灯环境光照度与车流量数据;
14.步骤s103,对光强照度和车流量数据进行聚类分析,将光强照度和车流量 分成响应等级;
15.步骤s104,进行聚类分析后得到特征向量《光照度等级、车流量等级、时间》;
16.步骤s105,对不同类进行类间分离性测度,建立初始操作表单,得到有向 无环图拓扑结构;
17.步骤s106,建立不同的与相应调光等级相匹配的核函数支持向量机分类器;
18.步骤s107,生成调光20%、调光40%、调光60%、调光80%和100%开灯 的六分类模型并用一部分采集的数据对模型进行训练;
19.步骤s108,通过对步骤s104生成的模型是否达到最优状态,若相匹配执行 步骤s109,若不匹配执行步骤s107;
20.步骤s109,用采集的另一部分数据进行svm调光预测;
21.步骤s110,系统终端发出调光指令对路灯进行控制并能在界面查看相关信息。
22.与现有技术相步,本发明的显著优点为:(1)本发明利用无线传感器网络的 数据通信能力,实现多节点协同工作,并通过数据融合的方式提高系统的监测范 围和检测精度;(2)本发明针对路灯分布特点采用带状非均匀分簇网络拓扑结 构,采用非均匀竞争半径的概念周期性的竞选簇首节点来平衡簇间通信,使距离 汇聚节点较近的簇首节点竞争较小,减小无线传感网络多跳路由中的“热区”问题 对系统的影响,分簇网络适用于路灯大规模组网,具有良好的网络扩展性,便于 能量管理、负载平衡、资源分配等特点;(3)本发明针对目前路灯控制技术控 制与路灯调光策略过于单一致使不能在复杂多变的环境中做到按需照明,提供了 一种改进的基于k-means 和支持向量机的自适应调光路灯照明算法,综合调整 路灯的灯光,减少电力资源的浪费。
附图说明
23.图1为本发明基于无线传感网自适应调光智慧路灯监控系统节点的结构框 架图。
24.图2为本发明基于无线传感网自适应调光智慧路灯监控系统的带状非均匀 分簇网络拓扑结构示意图。
25.图3为本发明基于无线传感网自适应调光智慧路灯监控系统的改进的基于 k-means 和支持向量机的自适应调光路灯照明算法流程图。
具体实施方式
26.如图1所示,一种基于无线传感网自适应调光智慧路灯监控系统,该系统包 括路灯节点传感控制模块、逻辑控制模块、无线通信模块和系统终端;
27.路灯节点传感控制模块安装在路灯灯杆,用于控制路灯调光和采集电量、光 强、交通流量信息,并将采集的信息发送到逻辑控制模块;
28.逻辑控制模块收到上传的数据后,通过无线通信模块发送给系统终端,系统 终端采用调光算法对上传的数据分析处理后,将处理结果反馈给路灯节点传感控 制模块并对
路灯进行调光并将相关信息显示在系统界面上,如果是故障信息,则 系统会发出定位信息来提醒管理人员;
29.所述的路灯节点传感控制模块用于路灯周边环境电量、光强、交通流量信息 的采集、放大和滤波,以及节点间的数据交换,并将采集到的数据通过zigbee 网络上传至逻辑控制模块;所述的逻辑控制模块用于节点的工作流程控制、数据 采集与分析、数据融合和无线通信管理;所述的无线通信模块用于逻辑控制模块 与系统终端的通信作用;所述的系统终端用于人机交互以及存储所采集到的各类 信息。
30.所述的路灯节点传感控制模块主要由cc2530最小系统、交通量微波检测电 路、光强度采集电路、0-10v调光电路、故障检测电路组成;cc2630无线射频 芯片是新一代双arm核-32位cpu芯片,可以组成更大、更稳定的网络,且支 持更大容量的数据包传输;并采用如图2所示的带状非均匀分簇网络拓扑结构实 现数据传输,其中簇内节点用于采集数据,并将数据转发给簇头节点,簇头节点 扮演路由器的作用,最终将数据转发到汇聚节点。汇聚节点通过数据融合的方式 提高系统的监测范围和定位精度。交通量微波检测电路作为敏感单元用于感知马 路中的交通量,0-10v调光电路用于响应系统终端发来的调光指令使路灯进行自 动调光,故障检测电路用于检测路灯是否发生故障。
31.所述的逻辑控制模块主要由stm32处理器及其外围电路和bds定位模块组 成;stm32处理器及其外围电路完成路灯节点传感控制模块的工作流程控制、 数据融合和zigbee与gprs的连接管理;bds定位模块用于确定故障电路位置。
32.所述的无线通信模块主要实现zigbee网络与wifi相连,将采集处理后的数 据发送到系统终端进行进一步处理与显示。
33.所述的系统终端采用qt平台设计开发并嵌入改进的基于k-means 和支持 向量机的自适应调光路灯照明算法实现人机交互,该算法包括:
34.1)收集不同时段与路段环境光照度与车流量数据,由于光照度与车流量变 化范围过大,因此先将光照度与车流量数据进行预处理;应用k-means 算法将 光照度和车流量数据进行聚类分簇,使其分成不同等级;
35.2)将预处理后数据作为新的特征数据xi={x1,x2,x3},特征属性x1、x2、x3分别代表光照强度等级、车流量等级、时间段;
36.3)采用最小序列优化算法来提高支持向量机解最优解的速度,选用线性、 多项式以及高斯核函数的支持向量机构建基于有向无环图支持向量机六分类调 光模型,该算法原理是在支持向量机二分类的基础上实现多分类,该算法在每两 个类别之间构造一个分类超平面,并将这些分类超平面构造成一个有向无环图结 构;该算法从顶层根节点开始分类,再根据分类的输出结果决定分类的方向,直 到将样本分成六类;
37.4)基于有向无环图支持向量机分类法将样本数据分为六类,并根据实际情 况给其贴上调光等级标签;六类分别代表关灯、调光20%、调光40%、调光60%、 调光80%和100%开灯,其中不同亮度用pwm实现;
38.5)由于有向无环图最后分类结果对于类别的排列顺序不同会直接影响分类 的效果,因此需要对不同类进行分离性测度;采用基于类分布的类间分离性测度 来评定各类间的分离性质并建立初始操作表单,重新排列类别顺序,得到有向无 环图拓扑结构;
39.6)为了保证分类效果,在进行分类时使用不同核函数可以保证分类精度, 经测
试,构建2vs3、3vs4、4vs5和5vs6分类器时使用线性核函数,构建1vs3、 1vs2分类器时使用高斯核函数,其他分类器使用多项式核函数可以显著提高分 类精度,使调光更准确智能。
40.本发明还提供一种基于上述监控系统的监控方法,包括如下步骤:
41.路灯节点传感控制模块采集路灯节点电量、光强、交通流量信息,并将采集 的信息发送到逻辑控制模块;
42.逻辑控制模块收到上传的数据后,通过无线通信模块发送给系统终端;
43.系统终端采用调光算法对上传的数据分析处理后,将处理结果反馈给路灯节 点传感控制模块并对路灯进行调光并将相关信息显示在系统界面上,如果是故障 信息,则系统会发出定位信息;如图3所示,所述调光算法为改进的基于 k-means 和支持向量机的自适应调光路灯照明算法,算法包括:
44.步骤s101,系统终端首先进行初始化;
45.步骤s102,输入并读取待调光路灯环境光照度与车流量数据;
46.步骤s103,对光强照度和车流量数据进行聚类分析,将光强照度和车流量 分成响应等级;
47.步骤s104,进行聚类分析后得到特征向量《光照度等级、车流量等级、时间》;
48.步骤s105,对不同类进行类间分离性测度,建立初始操作表单,得到有向 无环图拓扑结构;
49.步骤s106,建立不同的与相应调光等级相匹配的核函数支持向量机分类器;
50.步骤s107,生成调光20%、调光40%、调光60%、调光80%和100%开灯 的六分类模型并用一部分采集的数据对模型进行训练;
51.步骤s108,通过对步骤s104生成的模型是否达到最优状态,若相匹配执行 步骤s109,若不匹配执行步骤s107;
52.步骤s109,用采集的另一部分数据进行svm调光预测;
53.步骤s110,系统终端发出调光指令对路灯进行控制并能在界面查看相关信息。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。