1.本发明涉及一种非线性系统,具体地说,涉及基于最大熵高阶扩展的滤波器用非线性系统。
背景技术:
2.滤波器是一种选频装置,可以使信号中特定的频率成分通过,而极大地衰减其他频率成分,利用滤波器选频作用,可以滤除干扰噪声或进行频谱分析,在电子技术领域,“波”被狭义地局限于特指描述各种物理量的取值随时间起伏变化的过程,该过程通过各类传感器的作用,被转换为电压或电流的时间函数,称之为各种物理量的时间波形,通常还需要对波进行滤波。
3.一般的非线性滤波可归结为求条件期望的问题,对于有限多个观测值的情形,条件期望原则上可以用贝叶斯公式来计算,另外原始最大相关熵滤波已说明观测噪声为非高斯,但在算法描述中,仅对系统进行一次随机实现,这种方式是无法获得观测噪声的统计特性,从而大大降低最后估计值的精确度。
技术实现要素:
4.本发明的目的在于提供基于最大熵高阶扩展的滤波器用非线性系统,以解决上述背景技术中提出的问题。
5.为实现上述目的,本发明提供基于最大熵高阶扩展的滤波器用非线性系统,包括变量处理单元、等价表示单元、模型建立单元、模型改写单元和求解转换单元,其中:
6.所述变量处理单元用于将高阶多项式定义为隐式变量;
7.所述等价表示单元用于将原始状态模型等价地表示为伪线性形式,并形成伪线性状态模型;
8.所述模型建立单元用于结合伪线性状态模型建立增广线性状态模型;
9.所述模型改写单元用于将原始状态模型改写为线性形式;
10.所述求解转换单元用于对改写的线性形式进行求解,并将求解结果转换为滤波形式。
11.作为本技术方案的进一步改进,所述变量处理单元定义的隐式变量采用参数变量进行处理。
12.作为本技术方案的进一步改进,所述模型建立单元增广线性状态模型的建立根据相关熵进行联合分布,形成联合分布函数的随机变量。
13.作为本技术方案的进一步改进,所述联合分布函数采用抽样平均估计算法对相关熵进行计算,其计算公式如下:
[0014][0015]
其中,e为期望算子;κ(
·
,
·
)为高斯核;x和y为隐式变量;n为抽样次数;e为核带
宽;n为联合分布函数的随机变量个数;为隐式变量的相关熵。
[0016]
作为本技术方案的进一步改进,所述模型改写单元包括伪线性表示模块和线性化表示模块,所述伪线性表示模块用于对改写的非线性函数通过伪线性函数进行表示;所述线性化表示模块用于对改写的非线性函数通过线性化函数进行表示。
[0017]
作为本技术方案的进一步改进,所述伪线性函数表达式如下:
[0018][0019]
其中,为所有l阶张量之和;表示各阶张量对应的权重。
[0020]
作为本技术方案的进一步改进,所述线性化函数表达式如下:
[0021]
x(k 1)=a(k 1,k)x(k) w(k);
[0022]
其中,w(k)为建模误差。
[0023]
作为本技术方案的进一步改进,所述模型改写单元还包括误差建模模块,所述误差建模模块用于测量改写过程中形成的误差。
[0024]
作为本技术方案的进一步改进,所述误差建模模块采用非高斯建模误差算法对误差进行测量,其算法函数如下:
[0025][0026]
p(k 1|k)=a(k 1,k)p(k|k)a
t
(k 1,k) q(k);
[0027]
k(k 1)=(p(k 1|k)h
t
(k 1))(h(k 1)p(k 1|k)h
t
(k 1) r(k 1))-1
;
[0028][0029]
p(k 1|k 1)=(i-k(k 1)h(k 1))p(k 1|k);
[0030]
其中,q(k)=diag{q
(1)
(k)
…q(r)
(k)},w
(1)
(k)为非高斯噪声。
[0031]
作为本技术方案的进一步改进,所述非高斯噪声具有有限抽样w
(1,j)
(k)实现,w
(l)
(k)为0 均值的高斯白噪声,方差为q
(l)
,l=2,3,
…
,r。
[0032]
与现有技术相比,本发明的有益效果:
[0033]
该基于最大熵高阶扩展的滤波器用非线性系统中,通过结合预测误差协方差矩阵,建立预测值和测量值扩维向量的相互独立分解方法,并将每一时刻多次实现得到的目标函数进行统计,与抽样平均估计算法的核心公式相对应,建立用于估计系统状态的目标函数,从而更好的匹配了原样本均值估计器的思想,另外,将增益矩阵建模为一个不动点方程,进行在线迭代优化求解,并通过设置不同的参数,获得在不同条件下的最优估计值,从而提高估计值的精确度。
附图说明
[0034]
图1为本发明实施例1的整体模块流程框图;
[0035]
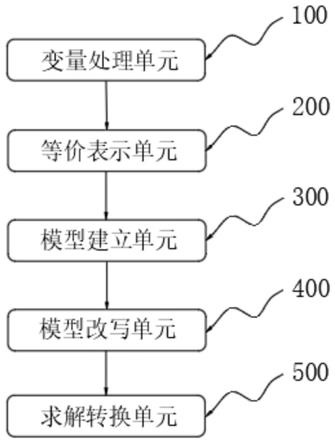
图2为本发明实施例1的模型改写单元模块框图。
[0036]
图中各个标号意义为:
[0037]
100、变量处理单元;200、等价表示单元;300、模型建立单元;400、模型改写单元; 410、伪线性表示模块;420、线性化表示模块;430、误差建模模块;500、求解转换单元。
具体实施方式
[0038]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0039]
实施例1
[0040]
本发明提供基于最大熵高阶扩展的滤波器用非线性系统,请参阅图1-图2,包括变量处理单元100、等价表示单元200、模型建立单元300、模型改写单元400和求解转换单元 500,其中:
[0041]
变量处理单元100用于将高阶多项式定义为隐式变量;
[0042]
等价表示单元200用于将原始状态模型等价地表示为伪线性形式,并形成伪线性状态模型;
[0043]
模型建立单元300用于结合伪线性状态模型建立增广线性状态模型,具体的,通过多元信息观测广线性状态模型,观测时,基于k时刻得到系统状态x(k)估计值和估计误差协方差p(k|k),基于滤波公式预测得到系统状态x(k 1)的一步预测估计值和相应的一步预测误差协方差矩阵记:系统状态x(k 1)的一步预测估计误差为:
[0044][0045]
然后将视为系统状态x(k 1)的一个测量,视为测量误差;再结合实际测量方程(2.13),综合可得联合测量模型组合:
[0046][0047]
其中,i为相应维数的单位阵,且有:
[0048][0049]
而后根据得系统状态x(k 1)的一步预测误差协方差矩阵为:
[0050][0051]
上式中,定义如下:
[0052][0053]
其中,q
(2)
(k),
…
,q
(r)
(k),分别是各高阶隐变量x
(2)
(k),
…
,x
(r)
(k)动态建模时随
机误差向量 w
(2)
(k),
…
,w
(r)
(k)的协方差矩阵;是原始系统状态模型中非高斯建模误差w
(1)
(k),在获得有限次抽样后计算出二阶统计量:
[0054][0055]
此外,中是原始系统测量状态模型中非高斯建模误差v(k 1),在获得有限次抽样后计算出二阶统计量:
[0056][0057]
其中,v
(j)
(k 1)为非高斯随机噪声向量v(k 1)的第j次实现向量;
[0058]
模型改写单元400用于将原始状态模型改写为线性形式;
[0059]
求解转换单元500用于对改写的线性形式进行求解,并将求解结果转换为滤波形式,其中:
[0060]
对于核函数针对系统状态变量x(k 1),依据相关熵目标函数给出系统状态估计值求解的不动点迭代数值求解过程,对目标函数 j
(j)
(x(k 1)求解它关于系统状态变量一阶偏导数,并令则有:
[0061][0062]
由于也包含有被求解系统状态变量x(k 1),将其等价变换为如下形式的不动点方程,以方便进行迭代数值求解。
[0063]
此外,
[0064]
上式中:
[0065][0066]
[0067][0068]
这样,利用x(k 1)=f(x(k 1))就可以基于相关熵目标函数,实现对系统状态估计值的不动点迭代数值求解。
[0069]
转换时,利用矩阵求逆引理,不动点求解方程:
[0070][0071][0072]
可等价变换如下:
[0073][0074][0075]
其中,进一步推导过程中,利用到增益矩阵性质:
[0076][0077]
这样,不动点数值求解方程x(k 1)=f(x(k 1))可等价改写为:
[0078][0079]
从而完成了从不动点求解方程向kalman滤波器求解的等价转换过程。
[0080]
本实施例中,变量处理单元100定义的隐式变量采用参数变量进行处理。
[0081]
进一步的,模型建立单元300增广线性状态模型的建立根据相关熵进行联合分布,形成联合分布函数的随机变量。
[0082]
具体的,联合分布函数采用抽样平均估计算法对相关熵进行计算,其计算公式如下:
[0083][0084]
其中,e为期望算子;κ(
·
,
·
)为高斯核;x和y为隐式变量;n为抽样次数;e为核带宽;n为联合分布函数的随机变量个数;为隐式变量的相关熵。
[0085]
此外,模型改写单元400包括伪线性表示模块410和线性化表示模块420,伪线性表示模块410用于对改写的非线性函数通过伪线性函数进行表示;线性化表示模块420用于对
改写的非线性函数通过线性化函数进行表示。
[0086]
除此之外,伪线性函数表达式如下:
[0087][0088]
其中,为所有l阶张量之和;表示各阶张量对应的权重。
[0089]
进一步的,线性化函数表达式如下:
[0090]
x(k 1)=a(k 1,k)x(k) w(k);
[0091]
其中,w(k)为建模误差。
[0092]
具体的,模型改写单元400还包括误差建模模块430,误差建模模块430用于测量改写过程中形成的误差。
[0093]
此外,误差建模模块430采用非高斯建模误差算法对误差进行测量,其算法函数如下:
[0094][0095]
p(k 1|k)=a(k 1,k)p(k|k)a
t
(k 1,k) q(k);
[0096]
k(k 1)=(p(k 1|k)h
t
(k 1))(h(k 1)p(k 1|k)h
t
(k 1) r(k 1))-1
;
[0097][0098]
p(k 1|k 1)=(i-k(k 1)h(k 1))p(k 1|k);
[0099]
其中,q(k)=diag{q
(1)
(k)
…q(r)
(k)},w
(1)
(k)为非高斯噪声。
[0100]
除此之外,非高斯噪声具有有限抽样w
(1,j)
(k)实现,w
(l)
(k)为0均值的高斯白噪声,方差为q
(l)
,l=2,3,
…
,r。
[0101]
另外,综合测量模型式中的向量u(k 1),是维度为的非高斯建模误差向量,各分量之间是非统计独立的,然后为了利用中的多维独立向量的相关熵形式,需要对l维非高斯向量u(k 1)进行统计独立化变换,为此,将式进一步表示为:
[0102][0103]
其中,b
x
(k 1)和by(k 1)分别为和的cholesky分解因子矩阵;
[0104]
而后将b-1
(k 1)分别作用于的两边,可得:
[0105][0106]
简化后得:
[0107]
d(k 1)=s(k 1)x(k 1) e(k 1);
[0108]
其中,e(k 1)=b-1
(k 1)u(k 1)
[0109]
由于因此,非高斯建模误差随机变量u(k 1)经过矩阵b-1
(k 1)等价变换后,得到随机e(k 1)的各分量之间成为统计独立的。
[0110]
本实施例在具体工作时,考虑如下状态为高阶多项式:
[0111][0112]
其中,,且有,初始值x(0)=[11]
t
,初始估计值初始估计误差协方差p(0|0)=0.01
×
diag(1,1),分别以σ=0.5,ε=10-1
和σ=3,ε=10-4
为例,给出mcekf和 h-mcekf两种滤波方法的估计结果,具体的:
[0113]
当σ=2、ε=10-1
时,mcekf=0.0143、h-mcekf=1.0646;ε=10-2
时,mcekf=0.0129、 h-mcekf=0.0217;ε=10-4
时,mcekf=0.0469、h-mcekf=0.0467;ε=10-6
时,mcekf=0.0434、 h-mcekf=0.0421;
[0114]
当σ=5、ε=10-1
时,mcekf=0.0205、h-mcekf=0.0189;ε=10-2
时,mcekf=0.0107、 h-mcekf=0.0099;ε=10-4
时,mcekf=0.0201、h-mcekf=0.0178;ε=10-6
时,mcekf=0.0203、 h-mcekf=0.0111;
[0115]
当σ=10、ε=10-1
时,mcekf=0.0128、h-mcekf=0.0105;ε=10-2
时,mcekf=0.0150、h-mcekf=0.0140;ε=10-4
时,mcekf=0.0133、h-mcekf=0.0092;ε=10-6
时,mcekf=0.0190、 h-mcekf=0.0169;
[0116]
通过上述数据可以得出:
[0117]
当测量噪声呈非高斯分布,给定过小的核带宽σ时,h-mcekf的滤波性能稍差于mcekf。但是,当给定一个合适的核带宽σ,h-mcekf的滤波性能可接近mcekf,甚至优于mcekf,与核带宽σ相比,阈值ε对滤波性能影响不大。
[0118]
以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术
人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的仅为本发明的优选例,并不用来限制本发明,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。