技术特征:
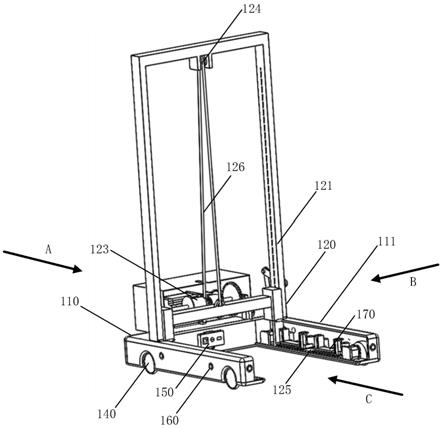
1.一种料箱搬运机器人,其特征在于,包括:u形车体,所述u形车体的两个端臂内侧为空仓,用于将料箱包围在所述端臂之间;龙门架举升机构,设置在所述u形车体的两个端臂相连接的一端,所述龙门架举升机构包括龙门架主体、举升电机、滚筒、定滑轮和升降板,所述龙门架主体可弯折的连接在所述u形车体上,包括竖直连接状态和水平连接状态;所述滚筒设置在所述u形车体上,并通过所述举升电机驱动;所述滚筒设有钢丝绳,所述钢丝绳绕过所述定滑轮连接所述升降板;所述定滑轮设置在所述龙门架的顶端,所述升降板为u形,沿竖直方向可滑动地连接两个端臂;所述升降板内侧设有多个伸缩板,所述伸缩板通过电动升降杆连接所述升降板,所述伸缩板通过电磁铁驱动伸缩;折叠机构,设置在所述龙门架举升机构地一侧,所述折叠机构包括设置在所述u形车体上的折叠电机和曲柄连杆,所述曲柄连杆的第一端固定连接所述折叠电机的轴进行旋转,所述曲柄连杆的第二端连接所述龙门架主体;多个驱动车轮,设置在所述u形车体底部;控制器,设置在所述u形车体上,并连接控制所述龙门架举升机构、所述折叠机构和所述驱动车轮;电池组,设置在所述u形车体内,用于供电。2.根据权利要求1所述的料箱搬运机器人,其特征在于,所述料箱搬运机器人还包括:条形码扫描器或rfid阅读器,用于对所述料箱的标签进行扫描;所述条形码扫描器或rfid阅读器设置在所述u形车体的内侧;所述条形码扫描器采用全局曝光的模式连续扫描所述标签。3.根据权利要求1所述的料箱搬运机器人,其特征在于,所述料箱搬运机器人还包括:多个激光雷达,设置在所述u形车体的外侧,用于识别所述料箱位置和障碍物位置。4.根据权利要求1所述的料箱搬运机器人,其特征在于,所述料箱搬运机器人的所述u形车体上还设有充电刷板。5.根据权利要求1所述的料箱搬运机器人,其特征在于,所述料箱搬运机器人还包括位置识别器,所述位置识别器布置在所述端臂的底部。6.根据权利要求5所述的料箱搬运机器人,其特征在于,所述位置识别器为激光探测器或超声波探测器。7.根据权利要求1所述的料箱搬运机器人,其特征在于,所述伸缩板可滑动的设置在所述升降板上方,所述伸缩板后侧固定永磁铁,所述升降板上固定所述电磁铁,所述电磁铁在通电状态下驱动所述永磁铁和所述伸缩板伸出和收缩;所述升降板两侧分别通过z型钢固定在两个电动升降杆上,并由举升电机驱动进行抬升和降低。8.根据权利要求7所述的料箱搬运机器人,其特征在于,所述伸缩板通过燕尾槽可滑动的连接所述升降板。9.根据权利要求1所述的料箱搬运机器人,其特征在于,各驱动车轮为万向轮,并单独设置驱动电机独立驱动。10.根据权利要求1所述的料箱搬运机器人,其特征在于,所述u形车体和所述升降板的两个端臂中的至少一个设置齿条,并通过所述齿条滑动连接在所述u形车体上;所述齿条通过端臂距离调整和齿轮驱动,以调节所述u形车体和所述升降板的两个端臂之间的距离;所
述u形车体的端臂末端设有宽度探测器,以检测料箱宽度并指导调节端臂间的距离。
技术总结
本发明提供一种料箱搬运机器人,包括:U形车体、龙门架举升机构、折叠机构、多个驱动车轮、控制器和电池组,U形车体用于将料箱包围在端臂之间,龙门架举升机构设置在U形车体的两个端臂相连接的一端,龙门架主体可弯折的连接在U形车体上;滚筒设置在U形车体上并通过举升电机驱动;滚筒设有钢丝绳,钢丝绳绕过定滑轮连接升降板;定滑轮设置在龙门架的顶端;升降板内侧设有多个伸缩板,并通过电动升降杆连接升降板,伸缩板通过电磁铁驱动伸缩;折叠机构包括设置在U形车体上的折叠电机和曲柄连杆;驱动车轮设置在U形车体底部。本发明能够直接从地面上抓取料箱进行搬运和抬升,不需要再借助其他转运平台和设备。助其他转运平台和设备。助其他转运平台和设备。
技术研发人员:汪朝林 常震 陈路 董瑞源 苏志远
受保护的技术使用者:宝开(上海)智能物流科技有限公司
技术研发日:2021.11.18
技术公布日:2022/2/24
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。