1.本发明属于海洋无人运载器技术领域,具体涉及一种新型无人潜航器的布放回收系统,同时还涉及该新型无人潜航器的布放回收系统的方法。
背景技术:
2.随着科学技术的发展和人类对于无人系统的深入研究,无人潜航器在导航、巡逻、探测、搜救、水文监测、布雷排雷等民用和军用领域有着广阔的应用前景。然而,相比于快速发展的无人潜航器技术,无人潜航器的布放回收技术仍然相对落后。现有潜航器的布放回收方式多为起吊式,该布放回收方式有如下明显缺陷:自动化程度低,需要人工参与;在布放和回收过程中,潜航器和布放回收装置的对接需要船上人员进行辅助操作;当海况恶劣时,布放回收作业困难,极易出现设备损坏和人员安全问题。
3.虽然目前已有一些提升潜航器布放回收自动化改进的方案。但其大多针对的是潜航器的自动捕获,如固定罩笼式对接,牵引绳捕获等,而对捕获之后的一系列回收操作及自动布放方案鲜有涉及,并且在使用过程中,对接方式难度大、要求高,需要不断调整姿态瞄准对接装置,受干扰影响大,因而增加了回收难度;牵引绳捕获方式需要水下无人航行器采用特定的抛绳机构,自行抛出牵引绳,适用性较差。
技术实现要素:
4.为了解决无人潜航器布放回收时遇到的一系列问题,提供一种同时具备潜航器布放及回收双重功能、能够实现潜航器布放及回收的完全自动化,有效提高布放回收效率和人员安全性的新型无人潜航器的布放回收系统,同时提供了相应的方法。
5.基于上述目的,本发明通过如下技术方案实现:一种新型无人潜航器的布放回收系统,包括船载平台,船载平台上设有布放回收平台,布放回收平台与设置在船载平台上的智能控制平台相配合;船载平台包括双体船舱,双体船舱内设有动力结构,动力结构包括分别设置在双体船舱船艉的螺旋桨推进器、分别设置在双体船舱中的陀螺减摇仪;双体船舱的甲板上设有多个间隙配合的甲板基座,甲板基座上设有与甲板基座相配合的潜航器。
6.优选地,布放回收平台包括设置在双体船舱上的框架结构,框架结构上设有潜航器抓持机构和与潜航器抓持机构相配合的吊筐调节机构,吊筐调节机构包括设置在双体船舱镂空甲板之间的吊筐,吊筐与设置在双体船舱上的吊筐驱动装置相配合;潜航器抓持机构包括机械爪,机械爪通过抓持驱动装置与设置在框架结构上的驱动滑轨装置相配合。
7.优选地,吊筐驱动装置包括至少一对设置双体船舱内侧面上的吊筐导轨,吊筐导轨内上均设有驱动液压杆,驱动液压杆与设置在吊筐侧面上的吊筐凸起相连接;吊筐导轨相对双体船舱的甲板面对角线设置。
8.优选地,机械爪包括一对相配合的弧型夹持板,弧型夹持板包括多个间隙配合的弧型板,弧型板通过设置在弧型板顶端的夹持支板相连接,夹持支板外侧面上设有支板连
杆,支板连杆远离夹持支板的一端设有夹持孔,夹持连杆上设有与夹持孔间隙配合的夹持调节凸起;其中一个弧型夹持板的夹持支板内侧面顶端两侧均设有夹持转动凸起,另一个弧型夹持板的夹持支板内侧面顶端两侧设有与夹持转动凸起转动配合的夹持转筒。
9.优选地,抓持驱动装置包括升降调节结构,升降调节结构下设有抓持固定结构;升降调节结构包括升降调节板,升降调节板上设有一对间隙配合的调节液压杆;抓持固定结构包括设置在升降调节板底面上的设有抓持液压杆,抓持液压杆的活动端设有抓持转轴,抓持转轴的两端均套设有分别与夹持调节凸起转动连接的抓持连杆。
10.优选地,抓持固定结构还包括一对设置在升降调节板底面上相对抓持液压杆轴对称与抓持液压杆间隙配合的辅助抓持凸起,辅助抓持凸起均连接有辅助连杆,辅助连杆一端设有与辅助抓持凸起相连接的调节转轴,另一端设有与夹持孔转动连接的辅助转轴;吊筐上均布有圆形镂孔,吊筐底面为v形底面。
11.优选地,驱动滑轨装置包括设置在调节液压杆顶端的纵向滑轨,纵向滑轨上设有两条间隙配合的横向滑轨,横向滑轨与纵向滑轨呈“工”字形设置,横向滑轨设置在框架结构顶端;纵向滑轨上设有与横向滑轨相配合的滑轨驱动结构;吊筐内敷设有软质橡胶层;弧型板内侧面上均敷设有软质橡胶层。
12.优选地,智能控制平台包括控制处理机构、环境检测机构、水下定位机构,控制处理机构包括设置在双体船舱内的布放回收控制器,布放回收控制器与设置在框架结构上的通信模块、导航定位模块、环境感知模块电性连接,通信模块连接有远程控制器;环境检测机构包括与布放回收控制器电性连接的距离感知模块和干扰感知模块,距离感知模块包括ka波段雷达、海事雷达、360度光学相机、双目相机;干扰感知模块包括多普勒海流传感器、风速传感器;水下定位机构包括设置在双体船舱上的发射换能器和与发射换能器相配合的声基阵,发射换能器与设置在潜航器上的应答器相配合;框架结构上设有机器视觉模块;吊筐上设有视觉传感器。
13.一种新型无人潜航器的布放回收系统的方法,步骤包括:潜航器的布放作业和潜航器回收作业;潜航器布放作业包括以下步骤:s1、布放回收人员通过远程控制器发出布放任务命令,通信模块接收布放任务命令,双体船舱的布放回收控制器根据接收到的命令进行航线规划,布放回收控制器根据航线等命令信息控制载有潜航器的船载平台航行至指定目标水域;s2、船载平台到达目标水域之后,利用机器视觉模块对甲板基座上安置的潜航器位置进行确定;布放回收控制器控制驱动滑轨装置通过抓持驱动装置带动机械爪移动到潜航器正上方,对潜航器进行抓取动作;s3、布放回收控制器控制抓持液压杆伸展,抓持液压杆通过抓持转轴带动抓持连杆向下移动,抓持连杆推动支板连杆,使弧型夹持板通过夹持转动凸起沿夹持转筒张开,机械爪张开;布放回收控制器控制一对调节液压杆伸展,机械爪向潜航器靠近,调节液压杆伸展完成后,机械爪伸展至合适位置;布放回收控制器控制抓持液压杆收缩,抓持液压杆通过抓持转轴带动抓持连杆向上移动,抓持连杆拉动支板连杆,使弧型夹持板通过夹持转动凸起沿夹持转筒闭合,机械爪闭合对潜航器进行固定夹持,可以利用设置在弧型板内侧面上的压力传感器进行压力检测;而后一对调节液压杆收缩,通过升降调节板带动机械爪上移,使潜航器脱离所在甲板基座;
s4、驱动滑轨装置通过抓持驱动装置带动机械爪移动,利用机器视觉模块实时对抓持系统的移动进行修正,直到抓持驱动装置移动到吊筐预期下放区域的正上方;s5、控制抓持驱动装置的调节液压杆伸长,机械爪向吊筐移动,直到到达吊筐后停止;抓持液压杆通过抓持转轴带动抓持连杆向下移动,抓持连杆推动支板连杆,使弧型夹持板通过夹持转动凸起沿夹持转筒张开,机械爪张开;潜航器被放置到吊筐中,驱动滑轨装置通过抓持驱动装置带动机械爪离开吊筐到达安全位置;s6、吊筐驱动装置的驱动液压杆带动吊筐沿吊筐导轨向下移动,使吊筐下降至一定深度,吊筐下降深度至水下3米,布放回收控制器启动潜航器,潜航器沿吊筐和双体船舱之间的间隙脱离;s7、待潜航器离开布放回收平台后,收回吊筐;至此,布放回收平台完成了对潜航器的自动布放。
14.优选地,步骤还包括:潜航器的回收作业;潜航器的回收作业包括以下步骤:t1、布放回收人员通过远程控制器发出回收任务命令,通信模块接收回收任务命令,双体船舱的布放回收控制器根据接收到的命令进行航线规划,布放回收控制器根据航线等命令信息控制船载平台航行至指定目标水域待命;并通过水下定位机构获取潜航器的实时运动信息;t2、布放回收控制器控制潜航器进入到可回收区域后,控制潜航器的航行深度保持在一定深度内,航行深度至水下3米,控制船载平台改变自身的运动状态对潜航器进行追越;t3、当船载平台距离潜航器到达可回收距离后,通过吊筐驱动装置将吊筐下放到水下适合位置上;通过视觉传感器对吊筐位置和潜航器位置进行视觉采集,调整船载平台位置状态,使得吊筐始终正对潜航器;t4、实时调整船载平台航速,当潜航器完全进入吊筐后,船载平台相对潜航器静止;在潜航器减速的同时,船载平台也要相应减速,防止相对速度过高发生猛烈碰撞损坏潜航器;潜航器和船载平台逐渐停止后,通过吊筐驱动装置将吊筐提至双体船舱的甲板处;t5、利用机器视觉模块确定潜航器在吊筐中的位置;根据潜航器的位置,驱动滑轨装置将抓持驱动装置移动到潜航器正上方,对潜航器进行抓取动作;t6、布放回收控制器控制抓持液压杆伸展,抓持液压杆通过抓持转轴带动抓持连杆向下移动,抓持连杆推动支板连杆,使弧型夹持板通过夹持转动凸起沿夹持转筒张开,机械爪张开;布放回收控制器控制一对调节液压杆伸展,机械爪向潜航器靠近,调节液压杆伸展完成后,机械爪伸展至合适位置;布放回收控制器控制抓持液压杆收缩,抓持液压杆通过抓持转轴带动抓持连杆向上移动,抓持连杆拉动支板连杆,使弧型夹持板通过夹持转动凸起沿夹持转筒闭合,机械爪闭合对潜航器进行固定夹持,此时已将潜航器夹持住,可以利用设置在弧型板内侧面上的压力传感器进行压力检测;而后一对调节液压杆收缩,通过升降调节板带动机械爪上移,将潜航器提起;t7、驱动滑轨装置将抓持驱动装置移动到甲板基座上方,通过与机器视觉模块的配合,机械爪张开,将潜航器放置在甲板基座上,抓持驱动装置缩回,驱动滑轨装置带动抓持驱动装置回位,船载平台驶离,将潜航器送至指定位置;至此,利用布放回收平台完成了潜航器的自动回收。
15.优选地,吊筐下降深度为1-8米;弧型板内侧面设置有布放回收控制器电性连接的与压力传感器;潜航器进入可回收区域后的潜航深度为1-8米。
16.与现有技术相比,本发明的有益效果如下:(1)本发明通过船载平台、布放回收平台配合智能控制平台,实现对潜航器的远程自动化布放及回收作业;通过双体船舱对潜航器进行运载及回收;陀螺减摇仪实现船载平台的前进后退,利用螺旋桨推进器之间的差动,实现船载平台的偏航;甲板基座用于潜航器的安置;框架结构的设置在保证后续设备安装要求的刚度的同时,减轻了船载平台的重量;吊筐方便对潜航器进行布放及回收动作;机械爪能够对潜航器进行稳定夹持,方便驱动滑轨装置通过抓持驱动装置带动机械爪运动,从而对潜航器进行布放及回收动作。
17.(2)驱动液压杆带动吊筐凸起在吊筐导轨内上下移动,方便将潜航器放置的水中或对水中的潜航器进行打捞;吊筐导轨相对双体船舱的甲板面对角线设置,能够保证带动吊筐稳定的上下移动,提升潜航器布放回收的安全性及稳定性;一对弧型夹持板相互配合,能够对潜航器进行有效夹持;多个弧型板通过夹持支板相连接,降低弧型夹持板的重量,有效提升机械爪的灵敏度及精确度;支板连杆的设置,方便抓持液压杆与其连接,实现机械爪的开合功能;升降调节结构通过调节液压杆带动升降调节板上下移动,从而带动抓持固定结构上下移动。
18.(3)辅助连杆上的辅助抓持凸起与夹持孔相连接,对机械爪进行辅助抓持动作,从而有效保持机械爪的抓持固定性能,大幅度提升机械爪的稳定性;圆形镂孔方便吊筐抬升或下降时,排出或浸入水流;吊筐底面为v形底面,方便将转移后的潜航器停留的v形底面底端,防止在吊筐抬升的过程中潜航器在吊筐内滚动。
19.(4)纵向滑轨配合横向滑轨,使得调节液压杆能够随纵向滑轨在横向滑轨上运动,方便带动双体船舱甲板上的潜航器移动到吊筐上方,将潜航器放置到吊筐内,滑轨驱动结构驱动纵向滑轨在横向滑轨上运动;吊筐内的软质橡胶层能够避免潜航器和吊筐之间发生碰撞而造成装备的损坏;弧型板内软质橡胶层能够有效提升机械爪的抓持固定效果。
20.(5)布放回收控制器对船载平台上的各个元器件进行自动化控制及数据分析处理,通信模块方便进行远程数据通信,导航定位模块对双体船舱进行定位及导航,远程控制器的设置,方便布放回收人员进行远距离操控;使用360度光学相机,ka波段雷达和海事雷达对外界位置信息进行探测,360度光学相机和双目相机对近距离的目标位置信息进行探测,海事雷达和ka波段雷达对远距离的目标位置信息进行探测,通过两种传感器的信息融合以达到对于海上目标位置进行高准确度的探测;多普勒海流传感器,风速传感器可以获得实时的风浪数据;机器视觉模块确定潜航器在吊筐中或者甲板基座上的位置,方便快速对潜航器位置进行确定,快速对潜航器进行抓持或放置。
21.综上,本发明具有对潜航器布放和回收的双重功能,且可以实现布放回收的完全自动化,可以避免人力参与,有效提高潜航器的布放回收效率和人员安全性;通过对潜航器的远程自动化控制,使得布放回收人员能够同时对多艘船载平台进行同时操控,大大提升了潜航器的布放回收效率,同时能够对每艘船载平台进行程序预设,使得船载平台能够对多个潜航器进行依次布放回收作业,大大降低了布放回收人员的劳动强度,大幅度提升潜航器的布放回收效率。
附图说明
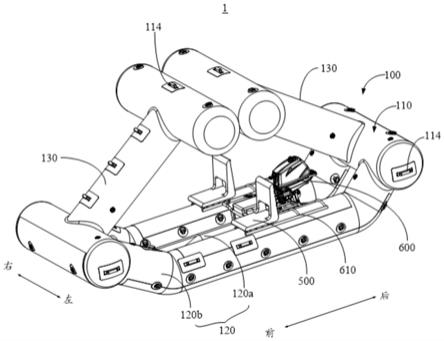
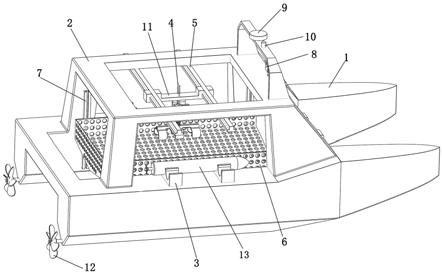
22.图1是实施例1中本发明的结构示意图;图2是实施例1中本发明的的右视图;图3是实施例1中本发明的的俯视图;图4是实施例1中本发明的的后视图;图5是实施例1中潜航器抓持机构的结构示意图;图6是实施例1中弧型夹持板的结构示意图;图7是实施例1中弧型夹持板的结构示意图;图8是实施例1中升降调节结构的结构示意图;图9是实施例1中潜航器的结构示意图;图10是实施例1中双体船舱的结构示意图;图11是实施例1中辅助连杆的结构示意图;图12是实施例1中抓持连杆的结构示意图;图13是实施例1中潜航器布放流程示意图;图14是实施例1中潜航器布放流程示意图;图15是实施例1中潜航器回收流程示意图;图16是实施例1中潜航器回收流程示意图。
23.图中,1、双体船舱,2、框架结构,3、甲板基座,4、潜航器抓持机构,5、横向滑轨,6、吊筐,7、吊筐导轨,8、环境感知模块,9、导航定位模块,10、通信模块,11、纵向滑轨,12、螺旋桨推进器,13、潜航器,401、调节液压杆,402、升降调节板,403、辅助抓持凸起,404、抓持液压杆,405、辅助连杆,406、辅助连杆,407、抓持转轴,408、支板连杆,409、支板连杆,410、抓持连杆,411、弧型夹持板,412、弧型夹持板,413、夹持支板,414、弧型板,415、夹持转筒,416、夹持调节凸起,417、夹持孔,418、夹持支板,419、弧型板,420、夹持转动凸起,421、夹持调节凸起,422、夹持孔。
具体实施方式
24.以下通过具体实施例对本发明作进一步说明,但并不限制本发明的范围。
25.实施例1一种新型无人潜航器的布放回收系统,其结构如图1-图16所示,包括船载平台,船载平台上设有布放回收平台,布放回收平台与设置在船载平台上的智能控制平台相配合;船载平台包括双体船舱1,双体船舱1内设有动力结构,动力结构包括分别设置在双体船舱1船艉的螺旋桨推进器12、分别设置在双体船舱1中的陀螺减摇仪;双体船舱1的甲板上设有多个间隙配合的甲板基座3,甲板基座3上设有与甲板基座3相配合的潜航器13。
26.布放回收平台包括设置在双体船舱1上的框架结构2,框架结构2上设有潜航器抓持机构4和与潜航器抓持机构4相配合的吊筐调节机构,吊筐调节机构包括设置在双体船舱1镂空甲板之间的吊筐6,吊筐6与设置在双体船舱1上的吊筐驱动装置相配合;潜航器抓持机构4包括机械爪,机械爪通过抓持驱动装置与设置在框架结构2上的驱动滑轨装置相配合。吊筐驱动装置包括至少一对设置双体船舱1内侧面上的吊筐导轨7,吊筐导轨7内上均设有驱动液压杆,驱动液压杆与设置在吊筐6侧面上的吊筐凸起相连接;吊筐导轨7相对双体
船舱1的甲板面对角线设置。
27.机械爪包括一对相配合的弧型夹持板412、411,弧型夹持板412、411包括多个间隙配合的弧型板414、419,弧型板414、419通过设置在弧型板414、419顶端的夹持支板413、418相连接,夹持支板413、418外侧面上设有支板连杆408、409,支板连杆408、409远离夹持支板413、418的一端设有夹持孔417、422,夹持连杆上设有与夹持孔417、422间隙配合的夹持调节凸起416、421;其中一个弧型夹持板411的夹持支板418内侧面顶端两侧均设有夹持转动凸起420,另一个弧型夹持板412的夹持支板413内侧面顶端两侧设有与夹持转动凸起420转动配合的夹持转筒415。抓持驱动装置包括升降调节结构,升降调节结构下设有抓持固定结构;升降调节结构包括升降调节板402,升降调节板402上设有一对间隙配合的调节液压杆401;抓持固定结构包括设置在升降调节板402底面上的设有抓持液压杆404,抓持液压杆404的活动端设有抓持转轴407,抓持转轴407的两端均套设有分别与夹持调节凸起416、421转动连接的抓持连杆410。
28.抓持固定结构还包括一对设置在升降调节板402底面上相对抓持液压杆404轴对称与抓持液压杆404间隙配合的辅助抓持凸起403,辅助抓持凸起403均连接有辅助连杆405、406,辅助连杆405、406一端设有与辅助抓持凸起403相连接的调节转轴,另一端设有与夹持孔417、422转动连接的辅助转轴;吊筐6上均布有圆形镂孔,吊筐6底面为v形底面。
29.驱动滑轨装置包括设置在调节液压杆401顶端的纵向滑轨11,纵向滑轨11上设有两条间隙配合的横向滑轨5,横向滑轨5与纵向滑轨11呈“工”字形设置,横向滑轨5设置在框架结构2顶端;纵向滑轨11上设有与横向滑轨5相配合的滑轨驱动结构;吊筐6内敷设有软质橡胶层;弧型板414、419内侧面上均敷设有软质橡胶层。
30.智能控制平台包括控制处理机构、环境检测机构、水下定位机构,控制处理机构包括设置在双体船舱1内的布放回收控制器,布放回收控制器与设置在框架结构2上的通信模块10、导航定位模块9、环境感知模块8电性连接,通信模块10连接有远程控制器;环境检测机构包括与布放回收控制器电性连接的距离感知模块和干扰感知模块,距离感知模块包括ka波段雷达、海事雷达、360度光学相机、双目相机;干扰感知模块包括多普勒海流传感器、风速传感器;水下定位机构包括设置在双体船舱1上的发射换能器和与发射换能器相配合的声基阵,发射换能器与设置在潜航器13上的应答器相配合;框架结构2上设有机器视觉模块;吊筐6上设有视觉传感器。
31.一种新型无人潜航器的布放回收系统的方法,步骤包括:潜航器13的布放作业;潜航器13的布放作业包括以下步骤:s1、布放回收人员通过远程控制器发出布放任务命令,通信模块10接收布放任务命令,双体船舱1的布放回收控制器根据接收到的命令进行航线规划,框架结构2上的导航定位模块9对规划航线进行导航定位,环境感知模块8对双体船舱1周围环境进行实时检测,布放回收控制器根据航线等命令信息控制载有潜航器13的船载平台通过螺旋桨推进器12航行至指定目标水域;s2、船载平台到达目标水域之后,利用机器视觉模块对甲板基座3上安置的潜航器13位置进行确定;布放回收控制器控制驱动滑轨装置通过抓持驱动装置带动机械爪移动到潜航器13正上方,利用潜航器抓持机构4对潜航器13进行抓取动作;s3、布放回收控制器控制抓持液压杆404伸展,抓持液压杆404通过抓持转轴407带
动抓持连杆410向下移动,抓持连杆410沿抓持转轴407转动时,抓持连杆410在夹持调节凸起416、421上转动,抓持连杆410推动支板连杆408、409张开,使弧型夹持板412、411通过夹持转动凸起420沿夹持转筒415张开,夹持支板413、418带动弧型板414、419张开,机械爪张开;布放回收控制器控制一对调节液压杆401伸展,机械爪向潜航器13靠近,调节液压杆401伸展完成后,机械爪伸展至合适位置,此时机械爪位于相邻甲板基座3间隙处;布放回收控制器控制抓持液压杆404收缩,抓持液压杆404通过抓持转轴407带动抓持连杆410向上移动,抓持连杆410沿抓持转轴407转动,抓持连杆410拉动支板连杆408、409闭合,使弧型夹持板412、411通过夹持转动凸起420沿夹持转筒415闭合,夹持支板413、418带动弧型板414、419闭合,机械爪闭合对潜航器13进行固定夹持,可以利用设置在弧型板414、419内侧面上的压力传感器进行压力检测,随着机械爪的抓持,辅助抓持凸起403上的辅助连杆405、406在夹持孔417、422内转动,对机械爪进行辅助调节;而后一对调节液压杆401收缩,通过升降调节板402带动机械爪上移,使潜航器13脱离所在甲板基座3;s4、驱动滑轨装置通过抓持驱动装置带动机械爪移动,滑轨驱动结构带动纵向滑轨11在横向滑轨5上滑动,同时,利用机器视觉模块实时对抓持系统的移动进行修正,直到抓持驱动装置移动到吊筐6预期下放区域的正上方;s5、控制抓持驱动装置的调节液压杆401伸长,机械爪向吊筐6移动,直到到达吊筐6后停止;抓持液压杆404通过抓持转轴407带动抓持连杆410向下移动,抓持连杆410沿抓持转轴407转动时,抓持连杆410在夹持调节凸起416、421上转动,抓持连杆410推动支板连杆408、409,使弧型夹持板412、411通过夹持转动凸起420沿夹持转筒415张开,夹持支板413、418带动弧型板414、419张开,机械爪张开;潜航器13被放置到吊筐6中,调节液压杆401收缩,通过升降调节板402带动机械爪上移,使驱动滑轨装置通过抓持驱动装置带动机械爪离开吊筐6到达安全位置;s6、吊筐驱动装置的驱动液压杆带动吊筐6沿吊筐导轨7向下移动,使吊筐6下降至一定深度,吊筐6下降深度至水下3米,布放回收控制器启动潜航器13,潜航器13沿吊筐6和双体船舱1之间的间隙脱离;s7、待潜航器13离开布放回收平台后,收回吊筐6;至此,布放回收平台完成了对潜航器13的自动布放。
32.步骤还包括:潜航器13的回收作业;潜航器13的回收作业包括以下步骤:t1、布放回收人员通过远程控制器发出回收任务命令,通信模块10接收回收任务命令,双体船舱1的布放回收控制器根据接收到的命令进行航线规划,布放回收控制器根据航线等命令信息控制船载平台航行至指定目标水域待命,导航定位模块9对规划航线进行导航定位,环境感知模块8对双体船舱1周围环境进行实时检测;并通过水下定位机构获取潜航器13的实时运动信息;t2、布放回收控制器控制潜航器13进入到可回收区域后,控制潜航器13的航行深度保持在一定深度内,航行深度至水下3米,控制船载平台改变自身的运动状态对潜航器13进行追越;t3、当船载平台距离潜航器13到达可回收距离后,通过吊筐驱动装置将吊筐6下放到水下适合位置上,驱动液压杆带动吊筐6沿吊筐导轨7向下移动;通过视觉传感器对吊筐6位置和潜航器13位置进行视觉采集,调整船载平台位置状态,使得吊筐6始终正对潜航器
13;t4、实时调整船载平台航速,当潜航器13完全进入吊筐6后,船载平台相对潜航器13静止;在潜航器13减速的同时,船载平台也要相应减速,防止相对速度过高发生猛烈碰撞损坏潜航器13;潜航器13和船载平台逐渐停止后,通过吊筐驱动装置将吊筐6提至双体船舱1的甲板处;t5、利用机器视觉模块确定潜航器13在吊筐6中的位置;根据潜航器13的位置,驱动滑轨装置将抓持驱动装置移动到潜航器13正上方,利用潜航器抓持机构4对潜航器13进行抓取动作;t6、布放回收控制器控制抓持液压杆404伸展,抓持液压杆404通过抓持转轴407带动抓持连杆410向下移动,抓持连杆410沿抓持转轴407转动时,抓持连杆410在夹持调节凸起416、421上转动,抓持连杆410推动支板连杆408、409张开,使弧型夹持板412、411通过夹持转动凸起420沿夹持转筒415张开,夹持支板413、418带动弧型板414、419张开,机械爪张开;布放回收控制器控制一对调节液压杆401伸展,机械爪向潜航器13靠近,调节液压杆401伸展完成后,机械爪伸展至合适位置;布放回收控制器控制抓持液压杆404收缩,抓持液压杆404通过抓持转轴407带动抓持连杆410向上移动,抓持连杆410沿抓持转轴407转动,抓持连杆410拉动支板连杆408、409闭合,使弧型夹持板412、411通过夹持转动凸起420沿夹持转筒415闭合,机械爪闭合对潜航器13进行固定夹持,此时已将潜航器13夹持住,可以利用设置在弧型板414、419内侧面上的压力传感器进行压力检测,随着机械爪的抓持,辅助抓持凸起403上的辅助连杆405、406在夹持孔417、422内转动,对机械爪进行辅助调节;而后一对调节液压杆401收缩,通过升降调节板402带动机械爪上移,将潜航器13提起;t7、驱动滑轨装置将抓持驱动装置移动到甲板基座3上方,通过与机器视觉模块的配合,滑轨驱动结构带动纵向滑轨11在横向滑轨5上滑动,而后,机械爪张开,将潜航器13放置在甲板基座3上,抓持驱动装置缩回,驱动滑轨装置带动抓持驱动装置回位,船载平台驶离,将潜航器13送至指定位置;至此,利用布放回收平台完成了潜航器13的自动回收。
33.吊筐6下降深度为1-8米;弧型板414、419内侧面设置有布放回收控制器电性连接的与压力传感器;潜航器13进入可回收区域后的潜航深度为1-8米。
34.实施例2一种新型无人潜航器的布放回收系统的方法,与实施例1的不同之处在于:可以自动施行潜航器13的布放作业,具体步骤如下:s1、布放回收人员通过远程控制器发出布放任务命令,通信模块10接收布放任务命令,双体船舱1的布放回收控制器根据接收到的命令进行航线规划,框架结构2上的导航定位模块9对规划航线进行导航定位,环境感知模块8对双体船舱1周围环境进行实时检测,布放回收控制器根据航线等命令信息控制载有潜航器13的船载平台通过螺旋桨推进器12航行至指定目标水域;s2、船载平台到达目标水域之后,利用机器视觉模块对甲板基座3上安置的潜航器13位置进行确定;布放回收控制器控制驱动滑轨装置通过抓持驱动装置带动机械爪移动到潜航器13正上方,利用潜航器抓持机构4对潜航器13进行抓取动作;s3、布放回收控制器控制抓持液压杆404伸展,抓持液压杆404通过抓持转轴407带
动抓持连杆410向下移动,抓持连杆410沿抓持转轴407转动时,抓持连杆410在夹持调节凸起416、421上转动,抓持连杆410推动支板连杆408、409张开,使弧型夹持板412、411通过夹持转动凸起420沿夹持转筒415张开,夹持支板413、418带动弧型板414、419张开,机械爪张开;布放回收控制器控制一对调节液压杆401伸展,机械爪向潜航器13靠近,调节液压杆401伸展完成后,机械爪伸展至合适位置,此时机械爪位于相邻甲板基座3间隙处;布放回收控制器控制抓持液压杆404收缩,抓持液压杆404通过抓持转轴407带动抓持连杆410向上移动,抓持连杆410沿抓持转轴407转动,抓持连杆410拉动支板连杆408、409闭合,使弧型夹持板412、411通过夹持转动凸起420沿夹持转筒415闭合,夹持支板413、418带动弧型板414、419闭合,机械爪闭合对潜航器13进行固定夹持,可以利用设置在弧型板414、419内侧面上的压力传感器进行压力检测,随着机械爪的抓持,辅助抓持凸起403上的辅助连杆405、406在夹持孔417、422内转动,对机械爪进行辅助调节;而后一对调节液压杆401收缩,通过升降调节板402带动机械爪上移,使潜航器13脱离所在甲板基座3;s4、驱动滑轨装置通过抓持驱动装置带动机械爪移动,滑轨驱动结构带动纵向滑轨11在横向滑轨5上滑动,同时,利用机器视觉模块实时对抓持系统的移动进行修正,直到抓持驱动装置移动到吊筐6预期下放区域的正上方;s5、控制抓持驱动装置的调节液压杆401伸长,机械爪向吊筐6移动,直到到达吊筐6后停止;抓持液压杆404通过抓持转轴407带动抓持连杆410向下移动,抓持连杆410沿抓持转轴407转动时,抓持连杆410在夹持调节凸起416、421上转动,抓持连杆410推动支板连杆408、409,使弧型夹持板412、411通过夹持转动凸起420沿夹持转筒415张开,夹持支板413、418带动弧型板414、419张开,机械爪张开;潜航器13被放置到吊筐6中,调节液压杆401收缩,通过升降调节板402带动机械爪上移,使驱动滑轨装置通过抓持驱动装置带动机械爪离开吊筐6到达安全位置;s6、吊筐驱动装置的驱动液压杆带动吊筐6沿吊筐导轨7向下移动,使吊筐6下降至一定深度,吊筐6下降深度至水下3米,布放回收控制器启动潜航器13,潜航器13沿吊筐6和双体船舱1之间的间隙脱离;s7、待潜航器13离开布放回收平台后,收回吊筐6;至此,布放回收平台完成了对潜航器13的自动布放。
35.实施例3一种新型无人潜航器的布放回收系统的方法,与实施例1的不同之处在于:可以自动施行潜航器13的回收作业,具体步骤如下:t1、布放回收人员通过远程控制器发出回收任务命令,通信模块10接收回收任务命令,双体船舱1的布放回收控制器根据接收到的命令进行航线规划,布放回收控制器根据航线等命令信息控制船载平台航行至指定目标水域待命,导航定位模块9对规划航线进行导航定位,环境感知模块8对双体船舱1周围环境进行实时检测;并通过水下定位机构获取潜航器13的实时运动信息;t2、布放回收控制器控制潜航器13进入到可回收区域后,控制潜航器13的航行深度保持在一定深度内,航行深度至水下3米,控制船载平台改变自身的运动状态对潜航器13进行追越;t3、当船载平台距离潜航器13到达可回收距离后,通过吊筐驱动装置将吊筐6下放
到水下适合位置上,驱动液压杆带动吊筐6沿吊筐导轨7向下移动;通过视觉传感器对吊筐6位置和潜航器13位置进行视觉采集,调整船载平台位置状态,使得吊筐6始终正对潜航器13;t4、实时调整船载平台航速,当潜航器13完全进入吊筐6后,船载平台相对潜航器13静止;在潜航器13减速的同时,船载平台也要相应减速,防止相对速度过高发生猛烈碰撞损坏潜航器13;潜航器13和船载平台逐渐停止后,通过吊筐驱动装置将吊筐6提至双体船舱1的甲板处;t5、利用机器视觉模块确定潜航器13在吊筐6中的位置;根据潜航器13的位置,驱动滑轨装置将抓持驱动装置移动到潜航器13正上方,利用潜航器抓持机构4对潜航器13进行抓取动作;t6、布放回收控制器控制抓持液压杆404伸展,抓持液压杆404通过抓持转轴407带动抓持连杆410向下移动,抓持连杆410沿抓持转轴407转动时,抓持连杆410在夹持调节凸起416、421上转动,抓持连杆410推动支板连杆408、409张开,使弧型夹持板412、411通过夹持转动凸起420沿夹持转筒415张开,夹持支板413、418带动弧型板414、419张开,机械爪张开;布放回收控制器控制一对调节液压杆401伸展,机械爪向潜航器13靠近,调节液压杆401伸展完成后,机械爪伸展至合适位置;布放回收控制器控制抓持液压杆404收缩,抓持液压杆404通过抓持转轴407带动抓持连杆410向上移动,抓持连杆410沿抓持转轴407转动,抓持连杆410拉动支板连杆408、409闭合,使弧型夹持板412、411通过夹持转动凸起420沿夹持转筒415闭合,机械爪闭合对潜航器13进行固定夹持,此时已将潜航器13夹持住,可以利用设置在弧型板414、419内侧面上的压力传感器进行压力检测,随着机械爪的抓持,辅助抓持凸起403上的辅助连杆405、406在夹持孔417、422内转动,对机械爪进行辅助调节;而后一对调节液压杆401收缩,通过升降调节板402带动机械爪上移,将潜航器13提起;t7、驱动滑轨装置将抓持驱动装置移动到甲板基座3上方,通过与机器视觉模块的配合,滑轨驱动结构带动纵向滑轨11在横向滑轨5上滑动,而后,机械爪张开,将潜航器13放置在甲板基座3上,抓持驱动装置缩回,驱动滑轨装置带动抓持驱动装置回位,船载平台驶离,将潜航器13送至指定位置;至此,利用布放回收平台完成了潜航器13的自动回收。
36.实施例4一种新型无人潜航器的布放回收系统,与实施例1的不同之处在于:吊筐驱动装置包括一对设置双体船舱1内侧面上的吊筐导轨7。
37.实施例5一种新型无人潜航器的布放回收系统,与实施例1的不同之处在于:吊筐驱动装置包括两对设置双体船舱1内侧面上的吊筐导轨7。
38.实施例6一种新型无人潜航器的布放回收系统的方法,与实施例1的不同之处在于:吊筐6下降深度为1米。
39.实施例7一种新型无人潜航器的布放回收系统的方法,与实施例1的不同之处在于:吊筐6下降深度为2米。
40.实施例8一种新型无人潜航器的布放回收系统的方法,与实施例1的不同之处在于:吊筐6下降深度为3米。
41.实施例9一种新型无人潜航器的布放回收系统的方法,与实施例1的不同之处在于:吊筐6下降深度为4米。
42.实施例10一种新型无人潜航器的布放回收系统的方法,与实施例1的不同之处在于:吊筐6下降深度为5米。
43.实施例11一种新型无人潜航器的布放回收系统的方法,与实施例1的不同之处在于:吊筐6下降深度为6米。
44.实施例12一种新型无人潜航器的布放回收系统的方法,与实施例1的不同之处在于:吊筐6下降深度为7米。
45.以上所述仅为本发明的较佳实施例而已,但不仅限于上述实例,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。