1.本发明涉及用于处理通过机动车探测到的数据的方法、具有指令的计算机程序和设备。此外,本发明涉及用于提供用于处理通过机动车探测到的数据的参数的方法、具有指令的计算机程序和设备。此外,本发明涉及机动车以及后端,在所述机动车或后端中使用根据本发明的方法或根据本发明的设备。
背景技术:
2.在现代的机动车中收集多种数据。在车辆越来越联网的过程中存在如下兴趣,将由车辆收集的数据用于进一步的分析评价。为此目的,可以从机动车取出数据并且将其供应给后端。例如数据可以从车辆传感器与地点和时间相关地针对关于天气预报、停车位占用亦或交通流数据的应用提取。然后在后端中将所述数据与地图上的其他数据组合并且返回引导给有用的功能。
3.针对数据收集的一个重要应用情况是构建用于匿名化的群数据的数据库,以用于研究、开发和保障自动驾驶功能。对于高度自动化的车辆的要求是,所述高度自动化的车辆在无事故的情况下胜任道路交通中的大量不同的且部分复杂的场景。由于这些场景中的大多数仅偶尔发生,因此在真实的道路交通中的测试不仅耗费时间而且成本高昂。对于直至批量生产阶段的自动驾驶功能的开发需要大量数据基础以用于保障算法,所述算法不再能通过经典的寿命测试行驶实现。因此,需要带有来自尽可能多种要求高的交通场景的数据的数据池,理想地从真实行驶馈送的数据,利用该数据池如此训练且连续地改进算法,使得车辆在道路交通中在所有可能发生的事件的情况下可以进行恰当的判定并且可靠地反应。
4.然而从车辆取出的数据在一些情况下允许推断确定的或至少可确定的自然人的个人的或客观的情况,例如经由机动车的驾驶员。
5.数据的这种收集和使用根据分别适用的数据保护法规通常只有在驾驶员有同意声明的情况下才可实现。虽然当今的消费者尤其是在软件的领域中完全信赖,接受使用条件并且放行用于进行数据分析评价,但在汽车领域中这迄今不是常见的。对于数据使用的同意声明的获得因此不总是简单的。此外,必须在软件更新的范围内如有可能得到用户的新的同意声明,这对于用户而言长期地可能令人不快。
6.为了确保数据保护,可以将数据供应给不同的匿名化方法。所述匿名化方法目的是,将数据产生者的身份隐藏在匿名化组中。
7.在该背景之前de 10 201 1 106 295 a1描述一种用于在机动车与服务提供商之间双向传递数据的方法。在该方法中将描述交通状态并且来自机动车的交通数据提供给服务提供商。这仅通过由安全运营商运行的后端服务器设备实现。借助于后端-服务器设备交通数据在传递给服务提供商之前匿名化。
8.us 2017/0083708 a1描述了用于按顺序的且与地点相关的数据组的匿名化的机构。作为对数据组接收的反应由企业扫描数据组,以便揭露一系列数据保护弱点。一组数据
保护限制基于所揭示的数据保护弱点产生,并且识别一组使用限制。数据组在使用数据保护限制和使用限制的情况下匿名化,由此形成经匿名化的数据组。经匿名化的数据组然后交还给企业。
9.在另一种用于匿名化的方式中,对数据进行分割。在此车辆在行驶期间的数据被分成不同的分段。以这种方式确保,可能的数据用户不能确定车辆的行驶的完全的数据组。总路程通常仅由非常少的、如有可能也由仅一个唯一的车辆驶过。但各个分段被许多车辆驶过。
10.在另一种用于匿名化的方式中混淆关于地点或时间的数据。在此,数据在空间方面或在时间方面随机相加地移动。以这种方式仅还关于一组车辆允许对原始的车辆进行识别。
11.就此而言,de 10 2016 225 287 a1描述了一种用于处理通过机动车探测到的数据的方法。在第一步骤中接收由机动车探测到的数据。接着将地点或时间混淆应用于所接收的数据。最终转发经混淆的数据以用于分析评价。所接收的数据的混淆在此可以在机动车内或在与机动车处于连接中的接收系统中进行。
12.de 10 2018 006 281 a1描述了一种用于运行车辆的辅助系统的方法。在该方法中检测车辆周围环境中的对象。如果在数据库中包含针对对象的条目,该条目将系统行动标记为有权利的,则关于探测到的对象触发系统行动。数据的匿名化如下进行,即,去除识别数据并且执行空间混淆。
13.de 10 2015 216 414 a1描述了一种用于探测关于第一车辆从起始区域至目标区域的运动的信息的方法。在此,第一车辆在起始区域中与处于起始区域中的第二车辆交换第一密钥,并且在目标区域中与处于目标区域中的第三车辆交换第二密钥。此外,第一车辆在使用第一密钥和第二密钥的情况下对关于运动的起始区域和目标区域的第一信息进行加密并且将所述第一信息与第二信息共同地经由加密进行存储,从而经加密的第一信息只能借助于确定数量的另外的关于加密的信息而解密。
14.虽然用于地点和时间混淆的方法良好地适用于在匿名化组内隐藏数据产生者的身份,然而数据使用者必须始终在地点和时间混淆范围方面进行妥协。
技术实现要素:
15.本发明的任务是,提供用于匿名化通过机动车探测到的数据的解决方案,所述解决方案允许对探测到的数据在带有较少妥协的情况下进行时间和地点混淆。
16.所述任务通过一种具有权利要求1或2的特征的方法,通过一种根据权利要求11所述的具有指令的计算机程序并且通过一种具有权利要求12或13的特征的设备解决。本发明的优选的设计方案是从属权利要求的主题。
17.根据本发明的第一方面,用于处理通过机动车探测到的数据的方法包括以下步骤:-由数据使用者接收用于探测到的数据的时间和地点混淆的至少一个参数组;-接收由机动车探测到的数据;-在使用所接收的参数组之一的情况下将时间和地点混淆应用到所接收的数据上;并且-转发经混淆的数据以用于进一步处理。
18.根据本发明的另一方面,计算机程序包含指令,所述指令在通过计算机实施时促使计算机实施以下用于处理通过机动车探测到的数据的步骤:-由数据使用者接收用于探测到的数据的时间和地点混淆的至少一个参数组;-接收由机动车探测到的数据;-在使用所接收的参数组之一的情况下将时间和地点混淆应用到所接收的数据上;并且-转发经混淆的数据以用于进一步处理。
19.术语“计算机”在此应广泛地理解。尤其是,计算机也包括控制器、工作站和其他基于处理器的数据处理设备。
20.计算机程序可以例如提供用于电子调取或存储在计算机可读的存储介质上。
21.根据本发明的另一方面,用于处理通过机动车探测到的数据的设备具有:-输入端,所述输入端用于由数据使用者接收用于探测到的数据的时间和地点混淆的至少一个参数组以及用于接收由机动车探测到的数据;-匿名化单元,所述匿名化单元用于在使用所接收的参数组之一的情况下将时间和地点混淆应用到所接收的数据上;以及-输出端,所述输出端用于转发经混淆的数据以用于进一步处理。
22.从数据产生者视角设置成,匿名化方法不以针对时间和地点混淆的固定的设定而工作,而是允许可调节的混合的匿名化。为此目的,采用先前所接收的参数组,所述参数组实现匿名化设定的与情形有关的适配。以这种方式不仅实现在探测到的数据中对事件的快速识别,而且实现其事后的地点精确的探测。
23.根据本发明的另一方面,用于提供用于处理通过机动车探测到的数据的参数的方法包括以下步骤:-确定用于探测到的数据的时间和地点混淆的至少一个参数组;以及-将所述至少一个参数组传输给用于处理通过机动车探测到的数据的设备。
24.根据本发明的另一方面,计算机程序包含指令,所述指令在通过计算机实施时促使计算机实施以下用于提供用于处理通过机动车探测到的数据的参数的步骤:-确定用于探测到的数据的时间和地点混淆的至少一个参数组;以及-将所述至少一个参数组传输给用于处理通过机动车探测到的数据的设备。
25.术语“计算机”在此应广泛地理解。尤其是,计算机也包括控制器、工作站和其他基于处理器的数据处理设备。
26.计算机程序可以例如提供用于电子调取或存储在计算机可读的存储介质上。
27.根据本发明的另一方面,用于提供用于处理通过机动车探测到的数据的参数的设备具有:-输入端,所述输入端用于接收用于探测到的数据的时间和地点混淆的至少一个参数组以及用于接收由机动车探测到的数据;-参数确定单元,所述参数确定单元用于确定用于探测到的数据的时间和地点混淆的至少一个参数组;以及-传输单元,所述传输单元用于将所述至少一个参数组传输给用于处理通过机动
车探测到的数据的设备。
28.从数据使用者视角设置成,该数据使用者不局限于在关于时间和地点混淆的带有妥协的设定的情况下被匿名化的数据。相反地,数据使用者可以与情形或时机相关地促使数据产生者,将经适配的参数组用于匿名化。为此,可以例如将期望的参数组传输给数据产生者。备选地,也可行的是,仅将如下请求传输给数据产生者,即,将在数据产生者方面已经存在的参数组用于匿名化。以这种方式数据使用者随时能够改变混淆算法的参数组。
29.根据本发明的一方面,所述至少一个参数组包括所述至少一个参数组能够应用于哪个位置或哪个区域的说明。优选可行的是,参数组的适配不是仅全局地执行以用于混淆滤波,而是所述参数组的适配精确地针对特定的位置或区域实施。这例如实现,将缓慢的且准确的混淆,也就是说大的时间混淆结合小的地点混淆应用到先前已知的事故点上,而由此也不会在其他区域中造成大的时间混淆。
30.根据本发明的一方面,所述至少一个参数组包括所述至少一个参数组能够应用于哪个类型的探测到的数据的说明。这实现,匿名化仅针对特定的数据组或已知的事件适配。例如可以对于所识别的救援车辆允许快速的且不准确的混淆,也就是说小的时间混淆结合大的地点混淆。
31.根据本发明的一方面,在两个或更多个用于探测到的数据的时间和地点混淆的参数组下进行选择。另一个可行方案是带有多个参数组的混淆,所述参数组可以随机地选择。可以有利的是,例如50%的数据以大的时间混淆结合小的地点混淆匿名化,而其余50%的数据以小的时间混淆结合大的地点混淆匿名化。以这种方式能够在统计上确保,快速地识别例如新的事件亦或事件的根本的变化,而已知的数据可以通过在时间之上的缓慢的识别更准确地测量。当参数组的精确的适配无法实现或无法以足够的安全性实现时,多个参数组的使用的这种方式则尤其是有利的。当然也可实现方法的组合,也就是说使用多个带有可适配的、精确地实施的参数的参数组。所使用的按比例的分配优选能够与应用有关地适配。
32.根据本发明的一方面,首先传输第一参数组,第一参数组引起探测到的数据以小的时间混淆结合大的地点混淆进行混淆。然后响应于在经混淆的数据中对事件的识别而传输第二参数组,第二参数组引起探测到的数据以大的时间混淆结合小的地点混淆进行混淆。以这种方式例如可行的是,准确地探测在约60秒内在5km上的堵塞或堵车。一旦这对于数据使用者已知,则数据使用者可以改变参数并且由此例如在500m内准确地确定堵车的位置。然而这现在以一定时间偏移实现。数据使用者由此能够快速地警告交通或借助于导航指示大面积地使交通换向。长期地,数据使用者同时能够准确地警告驾驶员有堵车。
33.优选地,将根据本发明的方法或根据本发明的设备使用在自主或手动控制的车辆、尤其是机动车中。备选地,根据本发明的解决方案也可以使用在后端中,数据从车辆传输给该后端。
附图说明
34.本发明的其他特征可从下文的说明书和附上的权利要求书中结合附图看出。
35.图1示意性地示出用于处理通过机动车探测到的数据的方法;图2示出用于处理通过机动车探测到的数据的设备的第一实施方式;图3示出用于处理通过机动车探测到的数据的设备的第二实施方式;
图4示意性地示出机动车,在该机动车中实现根据本发明的解决方案;图5示意性地示出用于提供用于处理通过机动车探测到的数据的参数的方法;图6示出用于提供用于处理通过机动车探测到的数据的参数的设备的第一实施方式;图7示出用于提供用于处理通过机动车探测到的数据的参数的设备的第二实施方式;图8示出在恒定的边界条件下混淆的变型方案;以及图9示意性地示出根据本发明的解决方案的系统方案。
具体实施方式
36.为了更好地理解本发明的原理,下面借助附图更详细阐释本发明的实施方式。不言而喻的是,本发明不局限于这些实施方式并且所描述的特征也可以组合或改变,而不脱离本发明的如在附上的权利要求书中所限定的保护范围。
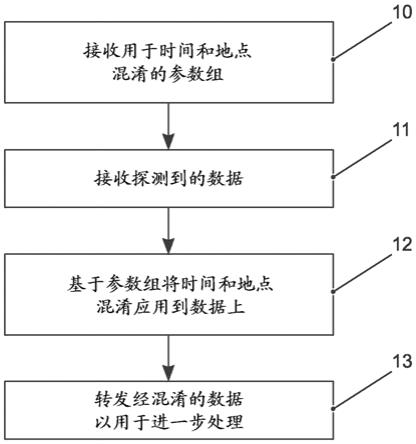
37.图1示意性地示出用于处理通过机动车探测到的数据的方法。在第一步骤中由数据使用者接收10用于探测到的数据的时间和地点混淆的至少一个参数组。此外接收11由机动车探测到的数据。接着在使用所接收的参数组之一的情况下将时间和地点混淆应用12到所接收的数据上。最终转发13经混淆的数据以用于进一步处理。参数组可以包括该参数组能够应用于哪个位置或哪个区域的说明。此外,参数组可以包括该参数组能够应用于哪个类型的探测到的数据的说明。当参数组应该被用于混淆时,这些说明优选在数据产生者侧考虑。备选地,在两个或更多个用于探测到的数据的时间和地点混淆的参数组下进行选择。从这些参数组中可以例如随机地选择一个用于混淆的参数组。
38.图2示出用于处理通过机动车探测到的数据d的设备20的第一实施方式的简化的示意图。设备20具有用于从数据使用者接收用于探测到的数据的时间和地点混淆的至少一个参数组p以及用于接收由机动车探测到的数据d的输入端21。数据处理单元22基于参数组p确定对于时间和地点混淆所需的参数。然后匿名化单元23将时间和地点混淆应用到所接收的数据d上。经混淆的数据vd最终经由输出端25转发以用于进一步处理。参数组p可以包括该参数组能够应用于哪个位置或哪个区域的说明。此外,参数组p可以包括该参数组能够应用于哪个类型的探测到的数据的说明。当参数组p应该被用于混淆时,这些说明优选在数据处理单元22侧考虑。备选地,在两个或更多个用于探测到的数据的时间和地点混淆的参数组p下进行选择。从这些参数组中可以例如随机地选择一个用于混淆的参数组p。
39.数据处理单元22和匿名化单元23可以由控制单元24控制。经由用户接口27如有可能可以改变数据处理单元22、匿名化单元23或控制单元24的设置。在设备20中产生的数据可以在需要时存储在设备20的存储器26中,例如用于后期的分析评价或用于通过设备20的部件使用。数据处理单元22、匿名化单元23以及控制单元24可以实现为专用硬件,例如实现为集成电路。但是当然数据处理单元、匿名化单元以及控制单元也可以部分地或完全地组合或实现为软件,该软件在适合的处理器上运行,例如在gpu上运行。输入端21和输出端25可以实现为分开的接口或实现为组合的双向接口。
40.图3示出用于处理通过机动车探测到的数据的设备30的第二实施方式的简化的示意图。设备30具有处理器32和存储器31。例如设备30是计算机、工作站或控制器。
41.在存储器31中存储有指令,所述指令在通过处理器32实施时促使设备30实施根据所描述的方法中的一个方法的步骤。在存储器31中存储的指令由此体现可通过处理器32实施的程序,该程序实现根据本发明的方法。设备具有用于接收信息的输入端33。由处理器32生成的数据经由输出端34提供。此外,所述数据可以存储在存储器31中。输入端33和输出端34可以联合成双向接口。
42.处理器32可以包括一个或多个处理器单元,例如微处理器,数字信号处理器或其组合。
43.所描述的实施方式的存储器26,31可以具有挥发性和/或非挥发性存储区域并且包括各种不同的存储仪器和存储介质,例如硬盘,光学存储介质或半导体存储器。
44.设备的这两种实施方式可以集成到机动车中或可以是与机动车处于连接中的后端的组成部分。
45.图4示意性地示出机动车40,在该机动车中实现根据本发明的解决方案。机动车40具有传感器系统41,利用该传感器系统可以探测数据d,例如交通状况。机动车40的另外的组成部分是导航系统42,数据传递单元43以及一系列辅助系统44,其中一个示例性地示出。借助于数据传递单元43可以构建通向后端80的连接,尤其是用于传输探测到的数据并且用于接收至少一个参数组p。用于处理探测到的数据d的设备20在该实施例中在使用所述至少一个所接收的参数组的情况下负责数据的时间和地点混淆,从而经混淆的数据vd被传输给后端80。备选地,数据d的混淆也可以首先在后端80中进行,然后所述数据从后端提供给数据使用者。在这种情况下,后端80接收所述至少一个参数组p。为了存储数据存在有存储器45。在机动车40的不同部件之间的数据交换经由网络46进行。
46.图5示意性示出用于提供用于处理通过机动车探测到的数据的参数的方法。在第一步骤中,确定50用于探测到的数据的时间和地点混淆的至少一个参数组。然后将所述参数组传输51给用于处理通过机动车探测到的数据的设备。参数组可以在此包括该参数组能够应用于哪个位置或哪个区域的说明。此外,参数组可以包括该参数组能够应用于哪个类型的探测到的数据的说明。此外,可以传输两个或更多个用于探测到的数据的时间和地点混淆的参数组。然后从这些参数组中可以在数据产生者侧随机地选择一个用于混淆的参数组。
47.图6示出用于提供用于处理通过机动车探测到的数据的参数的设备60的第一实施方式。设备60具有输入端61,例如用于接收数据使用者关于探测到的数据的混淆的要求。参数确定单元62确定用于探测到的数据的时间和地点混淆的至少一个参数组p。所述至少一个参数组p然后由传输单元63传输给用于处理通过机动车探测到的数据的设备20。参数组p在此可以包括该参数组能够应用于哪个位置或哪个区域的说明。此外,参数组p可以包括该参数组能够应用于哪个类型的探测到的数据的说明。此外,可以传输两个或更多个用于探测到的数据的时间和地点混淆的参数组p。然后从这些参数组中可以在设备20侧随机地选择一个用于混淆的参数组p。
48.参数确定单元62和传输单元63可以由控制单元64控制。经由用户接口67如有可能可以改变参数确定单元62、传输单元63或控制单元64的设置。在设备60中产生的数据可以在需要时存储在设备60的存储器66中,例如用于后期的分析评价或用于通过设备60的部件使用。参数确定单元62、传输单元63以及控制单元64可以实现为专用硬件,例如实现为集成
电路。但是当然参数确定单元、传输单元以及控制单元也可以部分地或完全地组合或实现为软件,该软件在适合的处理器上运行,例如在gpu上运行。输入端61和输出端65可以实现为分开的接口或实现为组合的双向接口。
49.图7示出用于提供用于处理通过机动车探测到的数据的参数的设备70的第二实施方式。设备70具有处理器72和存储器71。例如设备70是计算机或工作站。在存储器71中存储有指令,所述指令在通过处理器72实施时促使设备70实施根据所描述的方法中的一个方法的步骤。在存储器71中存储的指令由此体现可通过处理器72实施的程序,该程序实现根据本发明的方法。设备具有用于接收信息的输入端73。由处理器72生成的数据经由输出端74提供。此外,所述数据可以存储在存储器71中。输入端73和输出端74可以联合成双向接口。
50.处理器72可以包括一个或多个处理器单元,例如微处理器,数字信号处理器或其组合。
51.所描述的实施方式的存储器66,71可以具有挥发性和/或非挥发性存储区域并且包括各种不同的存储仪器和存储介质,例如硬盘、光学存储介质或半导体存储器。
52.图8示出在恒定的边界条件下混淆的变型方案。所描绘的是针对匿名化的给定的程度的时间混淆和地点混淆的可能的组合。如附图中可看出的,时间混淆的数值
ä
t越小,地点混淆的数值
ä
s就越大,并且反之亦然。最小的时间混淆需要最大的地点混淆,而最小的地点混淆需要最大的时间混淆。这导致,数据使用者在混淆方面始终必须进行妥协。
53.图9示意性示出根据本发明的解决方案的系统方案。该解决方案的基本构思是,数据使用者91通过参数提供93随时能够改变混淆算法92的参数组p,该混淆算法被应用到由数据产生者90探测到的数据上。以这种方式数据使用者91可以例如从数据中快速地读出效果,但然后随后更详细地表达。
54.示例性地例如可行的是,准确地探测在约60秒内在5km上的堵塞或堵车。一旦这对于数据使用者91已知,则数据使用者可以改变参数并且由此例如在500m内准确地确定堵车的位置。然而这现在以600秒的时间偏移实现。数据使用者91由此能够快速地警告交通或借助于导航指示大面积地使交通换向。长期地,数据使用者同时能够准确地警告驾驶员有堵车。
55.参数组p的适配可以不仅全局地针对混淆算法92执行,而且精确地针对特定的位置或区域或针对特定的数据组或已知的事件。以这种方式存在如下可能性,即,将缓慢的且准确的混淆、也就是说大的时间混淆结合小的地点混淆应用到先前所识别的堵车上。同时可以对于所识别的救援车辆允许快速的且不准确的混淆,也就是说小的时间混淆结合大的地点混淆。
56.另一种可能方案是带有多个参数组p的混淆,所述参数组随机地选择。可以有利的是,例如50%的数据以大的时间混淆结合小的地点混淆匿名化,而其余50%的数据以小的时间混淆结合大的地点混淆匿名化。以这种方式能够在统计上确保,快速地识别例如新的事件亦或事件的根本的变化,而已知的数据可以通过在时间之上的缓慢的识别更准确地测量。当参数组p的精确的适配无法实现或无法以足够的安全性实现时,多个参数组p的使用的这种方式则尤其是有利的。
57.针对带有多个参数组p的混淆的一种可行的应用情况是识别结冰的道路。对于这种应用情况可以例如将测量的30%以5km的空间模糊和1分钟的时间模糊混淆。由此,可以快
速地识别新的结冰。警告由此快速地存在,然而在空间上是非常粗略的。而测量的70%以250m的空间模糊和20分钟的时间模糊混淆。由此可以准确地识别道路上的结冰的边界。警告由此是准确的,但非常迟缓。
58.所属的参数组p或参数矩阵是:[30%,5km,1分钟;70%,250m,20分钟]。
[0059]
当然也可实现方法的组合,也就是说使用多个带有可适配的、精确地实施的参数的参数组p。
[0060]
附图标记列表10
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
接收用于时间和地点混淆的参数组11
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
接收探测到的数据12
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
基于参数组将时间和地点混淆应用到数据上13
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
转发经混淆的数据以用于进一步处理20
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
设备21
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
输入端22
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
数据处理单元23
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
匿名化单元24
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
控制单元25
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
输出端26
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
存储器27
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
用户接口30
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
设备31
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
存储器32
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
处理器33
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
输入端34
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
输出端40
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
机动车41
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
传感器系统42
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
导航系统43
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
数据传递单元44
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
辅助系统45
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
存储器46
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
网络50
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
确定用于时间和地点混淆的至少一个参数组51
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
传输所述至少一个参数组60
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
设备61
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
输入端62
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
参数确定单元63
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
传输单元64
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
控制单元
65输出端66存储器67用户接口70设备71存储器72处理器73输入端74输出端80后端90数据产生者91数据使用者92混淆算法93参数提供d数据
ä
s地点混淆的数值δs
max
最大的地点混淆
ä
t时间混淆的数值
ä
t
max
最大的时间混淆p参数组vd经混淆的数据
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
