1.本发明涉及用于在基板上焊接芯片的焊接装置以及焊接方法,更具体地涉及基于由温度传感器检测到的数据执行焊接位置的确定及校正的焊接装置以及焊接方法。
背景技术:
2.半导体(或者显示器)制造工艺是用于在基板(例如:晶圆)上制造半导体元件的工艺,例如包括曝光、蒸镀、蚀刻、离子注入、清洗、封装等。尤其,在封装工艺中,作为替代用于电连接层叠的芯片间的线焊接的技术,披露有在芯片开通微细的孔洞并在相应孔洞中插入导电体来电连接下芯片和上芯片的tsv(through silicon via;硅通孔)技术。
3.作为tsv焊接过程的一环,可以执行用于在基板上焊接芯片的芯片焊接工艺。通常,焊接单元的焊接头提取芯片之后向基板上的焊接位置移动,将芯片焊接到相应焊接位置。在此,使用设置于焊接单元中的视觉单元(例如:相机)来检查相应焊接位置和焊接头是否对准,使用视觉单元进行焊接头的校位后执行焊接。
4.另一方面,为了提高半导体制造工艺的效率,被要求在基板上迅速焊接芯片的方法,但由于如上述那样使用视觉单元的校正等的顺序,焊接时间可能延迟。
技术实现要素:
5.因此,本发明的实施例提供用于准确且迅速地在基板上焊接芯片的焊接装置以及焊接方法。
6.本发明的解决课题不限于以上所提及的,本领域技术人员会从下面的记载能够明确地理解未被提及的其它解决课题。
7.根据本发明的实施例的焊接装置包括:作业台,被安放基板;门吊,设置于所述作业台的上方;焊接单元,沿着所述门吊移动并在所述基板上焊接芯片;第一温度传感器,设置于所述焊接单元,并提供与所述焊接单元的温度相对应的第一温度值;第二温度传感器,设置于所述焊接装置的周边,并提供与所述焊接装置的周边的气体温度相对应的第二温度值;以及控制部,为了使所述焊接单元位于所述基板上的焊接位置而使所述焊接单元移动,并控制焊接单元在所述焊接位置焊接芯片。可以是,所述控制部基于第一温度值以及第二温度值的加权和来确定所述焊接单元的移动距离。
8.在一实施例中,可以是,所述控制部基于针对所述基板上的芯片的焊接检查结果,校正适用于所述第一温度值的第一加权值以及适用于所述第二温度值的所述第二加权值。
9.在一实施例中,可以是,所述门吊包括提供用于所述焊接单元水平移动的路径的第一移动导向件以及第二移动导向件。
10.在一实施例中,可以是,焊接装置还包括:第三温度传感器,设置于所述第一移动导向件,并提供与所述第一移动导向件的温度相对应的第三温度值,所述控制部基于所述第一温度值、所述第二温度值以及所述第三温度值的加权和来确定所述焊接单元的移动距离。
11.在一实施例中,可以是,所述控制部基于针对所述基板上的芯片的焊接检查结果,校正所述第一加权值、所述第二加权值以及适用于所述第三温度值的第三加权值。
12.在一实施例中,可以是,焊接装置还包括:第四温度传感器,设置于所述第二移动导向件,并提供与所述第二移动导向件的温度相对应的第四温度值,所述控制部基于所述第一温度值、所述第二温度值、所述第三温度值以及所述第四温度值的加权和,确定所述焊接单元的移动距离。
13.在一实施例中,可以是,所述控制部基于针对所述基板上的芯片的焊接检查结果,校正所述第一加权值、所述第二加权值、所述第三加权值以及适用于所述第四温度值的第四加权值。
14.根据本发明的实施例的焊接方法包括:使基板位于作业台上的步骤;确定焊接位置的步骤;为了使焊接单元位于所述焊接位置上而使所述焊接单元移动的步骤;以及在所述基板上的焊接位置焊接芯片的步骤。在此,可以是,使所述焊接单元移动的步骤包括:从设置于所述焊接单元的第一温度传感器获取第一温度值的步骤;从设置于焊接装置周边的第二温度传感器获取第二温度值的步骤;以及基于所述第一温度值以及所述第二温度值的加权和而确定所述焊接单元的移动距离的步骤。
15.在一实施例中,可以是,焊接方法还包括:基于针对所述基板上的芯片的焊接检查结果,校正适用于所述第一温度值的第一加权值以及适用于所述第二温度值的第二加权值的步骤。
16.在一实施例中,可以是,使所述焊接单元移动的步骤还包括:从设置于在所述门吊中提供用于所述焊接单元水平移动的路径的第一移动导向件中的第一温度传感器获取与所述第一移动导向件的温度相对应的第三温度值的步骤。
17.在一实施例中,可以是,使所述焊接单元移动的步骤包括:基于所述第一温度值、所述第二温度值以及所述第三温度值的加权和,确定所述焊接单元的移动距离的步骤。
18.在一实施例中,可以是,使所述焊接单元移动的步骤还包括:从设置于在所述门吊中提供用于所述焊接单元水平移动的路径的第二移动导向件中的第一温度传感器获取与所述第二移动导向件的温度相对应的第四温度值的步骤。
19.在一实施例中,可以是,使所述焊接单元移动的步骤包括:基于所述第一温度值、所述第二温度值、所述第三温度值以及第四温度值的加权和,确定所述焊接单元的移动距离的步骤。
20.在一实施例中,可以是,焊接方法还包括:基于针对所述基板上的芯片的焊接检查结果,校正所述第一加权值、所述第二加权值、所述第三加权值以及适用于所述第四温度值的第四加权值的步骤。
21.根据本发明的实施例的焊接设备包括:装载部,被安放用于容纳基板的容器;基板转送部,从安放在所述装载部中的容器转送所述基板;焊接处理部,在从所述基板转送部提供的基板上焊接芯片;以及检查部,从所述基板转送部接收通过所述焊接处理部处理的基板,并检查焊接在被处理的所述基板上的芯片。可以是,所述焊接处理部包括:作业台,被安放基板;门吊,设置于所述作业台的上方;焊接单元,沿着所述门吊移动并在所述基板上焊接芯片;第一温度传感器,设置于所述焊接单元,并提供与所述焊接单元的温度相对应的第一温度值;第二温度传感器,设置于所述框架,并提供与所述空间的温度相对应的第二温度
值;控制部,为了使所述焊接单元位于所述基板上的焊接位置而使所述焊接单元移动,并控制焊接单元在所述焊接位置焊接芯片。可以是,所述控制部基于第一温度值以及第二温度值的加权和来确定所述焊接单元的移动距离。
22.根据本发明的实施例,使用从温度传感器提供的温度数据来确定及校正焊接单元的移动距离,从而焊接单元能够迅速移动到准确的位置并迅速地在基板上焊接芯片。
23.本发明的效果不限于以上提及的,本领域技术人员会从下面的记载能够明确地理解未提及的其它效果。
附图说明
24.图1示出根据本发明的实施例的焊接设备的概要结构。
25.图2示出根据本发明的实施例的焊接设备内焊接处理装置的概要结构。
26.图3以及图4示出根据本发明的实施例的焊接装置以及焊接装置中的温度传感器的配置的例子。
27.图5是示出根据本发明的实施例的焊接方法的流程图。
具体实施方式
28.以下,参照附图来详细说明本发明的实施例,以使得本发明所属技术领域中具有通常知识的人能够容易地实施。本发明可以以各种不同方式实现,不限于在此说明的实施例。
29.为了清楚地说明本发明,省略了与说明无关的部分,贯穿说明书整体对相同或类似的构成要件标注相同的附图标记。
30.另外,在多个实施例中,对具有相同结构的构成要件,使用相同的附图标记来仅说明代表性实施例,在其余的其它实施例中仅说明与代表性实施例不同的结构。
31.在说明书整体中,当表述某部分与其它部分“连接(或者结合)”时,其不仅是“直接连接(或者结合)”的情况,还包括将其它部件置于中间“间接连接(或者结合)”的情况。另外,当表述某部分“包括”某构成要件时,只要没有特别相反记载,其意指可以还包括其它构成要件而不是排除其它构成要件。
32.只要没有不同地定义,包括技术或科学术语在内在此使用的所有术语具有与本发明所属技术领域中具有通常知识的人一般所理解的含义相同的含义。在通常使用的词典中定义的术语之类的术语应解释为具有与相关技术文脉上具有的含义一致的含义,只要在本技术中没有明确定义,不会理想性或过度地解释为形式性含义。
33.图1示出根据本发明的实施例的焊接设备的概要结构。根据本发明的实施例的焊接设备10可以用于在基板20上焊接芯片32。在此,芯片32也可以通过托盘或者载体带30供应,并可以从晶圆40供应。
34.焊接设备10可以包括:装载部300,用于安放容纳基板20的容器22;基板转送部500,从安放有装载部300的容器转送基板20;焊接处理部100a、100b,在从基板转送部500提供的基板20上焊接芯片32;以及检查部400,从基板转送部500接收通过焊接处理部100a、100b焊接处理的基板20,并检查焊接在焊接处理完的基板20上的芯片32。另外,可以具备用于供应附着有要焊接到基板20上的芯片32的载体带的载体带供应部110、124、供投放容纳
载体带供应部110、124和芯片供应用晶圆40的容器50的芯片载体装载部190。
35.作为一例,焊接处理部可以包括具有相同结构的第一焊接处理部100a和第二焊接处理部100b。如图1所示,可以以基板转送部500作为中心对称配置。另外,装载部300和检查部400可以以基板转送部500作为中心背向配置。
36.参照图1,若在装载部300安放用于容纳基板20的容器22,则容纳在容器22中的基板20通过基板转送部500的基板搬运机械臂510向焊接处理部100a、100b传递。另外,可以从作为芯片装载部提供的载体带供应部110、124或者安放于芯片载体装载部190的容器50向焊接处理部100a、100b供应芯片供应用晶圆40。之后,提供用于在安放于作业台102中的基板20上焊接芯片32的焊接单元130,在后面说明焊接单元130的驱动以及焊接方法。
37.若结束在基板20上焊接芯片32,则基板20通过基板搬运机械臂510从焊接处理部100a、100b焊接后为了检查(pbi:post bonding inspection)而向检查部400传递。在检查部400中具备基板排列单元600,基板排列单元600可以在检查台以及检查装置中排列基板20。在检查部400结束检查之后,基板20可以通过基板搬运机械臂510收纳在装载部300的容器22中并为了之后的处理而搬出。
38.图2示出根据本发明的实施例的焊接设备内焊接处理部的概要结构。图2示出图1的焊接处理部100a的详细结构。
39.参照图2,焊接处理部100a提供用于安放基板20的作业台102、设置于作业台102的上方的门吊136、138以及沿着门吊136、138移动并在基板20上焊接芯片32的焊接单元130。虽然未图示,但是可以提供控制焊接单元的驱动(水平移动、垂直移动)的控制部。根据本发明的实施例,可以提供多个温度传感器,该多个温度传感器用于测定用作用于控制焊接单元的驱动的参数的温度值。
40.焊接单元130可以包括用于将芯片32、42焊接到基板20上的焊接头132以及用于使焊接头132向水平以及垂直方向移动的头驱动部。在焊接头132可以安装具有与芯片32、42对应的尺寸的焊接工具(tool)。焊接单元130可以利用真空压力而提取芯片32、42,在焊接头132中可以具备用于加热芯片32、42的加热器(未图示)。作业台102可以通过作业台驱动部104向水平方向移动。例如,作业台102可以通过作业台驱动部104向x轴方向移动,焊接头132可以通过头驱动部向y轴方向移动。即,基板20上的焊接位置和焊接头132之间的排列可以通过作业台驱动部104和头驱动部来执行。另外,作业台102可以构成为能够为了基板20的排列而旋转。
41.在作业台102的上方可以配置用于检测基板20上的焊接位置的上排列相机146。作为一例,上排列相机146可以构成为在第一门吊136上能够通过上排列相机驱动部148向y轴方向移动,并可以用于焊接位置和焊接头132的排列。即,基板20上的焊接位置可以通过上排列相机146检测到,可以利用检测到的焊接位置的位置坐标来调节焊接头132的位置。
42.可以在门吊136、138之间配置第一下相机150,可以通过第一下相机150观测到芯片32、42真空吸附于焊接工具的下表面的状态。第一下相机150可以用于纠正被焊接工具吸附的芯片32、42的姿势。门吊136、138包括用于使焊接单元130的水平方向移动的移动导向件141、142。焊接单元130可以沿着移动导向件141、142移动。虽然未图示,但是可以提供用于控制焊接单元130的焊接的控制部。控制部可以通过一个或其以上的处理器实现。如下说明,控制部可以控制焊接单元130以为了使焊接单元130位于焊接位置而使焊接单元130移
动,并在焊接位置焊接芯片32、42。根据本发明的实施例,控制部可以使用从多个温度传感器提供的温度值来补偿热量引起的移动量误差。
43.另外,可以设置供应具有用于分别收纳要焊接到基板20上的芯片32的小容器的第一载体带30的第一载体带供应部110以及供应第二载体带38的第二载体带供应部124。尤其,可以选择性地使用第一载体带供应部110和第二载体带供应部124中的任一个。例如,可以在收纳在第一载体带30中的芯片32全部供应之后,供应收纳在第二载体带38中的芯片32。另外,第一载体带供应部110和第二载体带供应部124也可以分别供应彼此不同种类的带。与图2的示例不同,也可以仅提供一个载体带供应部110、124。
44.另外,作为用于供应芯片42的手段,可以提供设置有芯片42的晶圆40。晶圆40安放于晶圆作业台160,在晶圆作业台160的一侧可以具备用于对收纳有芯片供应用晶圆40的容器50进行支承的芯片载体装载部190。另外,在芯片载体装载部190的一侧可以具备用于从容器50取出晶圆40并转送到晶圆作业台160上的晶圆转送单元192。晶圆转送单元192可以包括用于把持晶圆40的夹具194以及用于使夹具194向水平方向移动的夹具驱动部196。
45.在载体带供应部110、124和晶圆作业台160的上方可以配置用于从所述载体带30、38或者晶圆40一个一个提取芯片32、42并转送的第一芯片转送单元170。第一芯片转送单元170可以包括配置于载体带供应部110、124以及晶圆作业台160上方并用于利用真空压力提取芯片32、42的采摘器172以及用于使采摘器172向水平方向(例如:x轴方向)移动的采摘器驱动部174。另外,采摘器驱动部174可以为了提取芯片32、42而使所述采摘器172向垂直方向移动。
46.在载体带供应部110、124和晶圆作业台160之间可以配置用于使得被采摘器172转送的芯片32、42向与作业台102相邻的位置移动的第二芯片转送单元180。第二芯片转送单元180可以包括用于支承芯片32、42的芯片梭182以及用于使芯片梭182在载体带供应部110、124与晶圆作业台160之间的第一位置和与作业台102相邻的第二位置之间向水平方向例如y轴方向移动的梭驱动部184。
47.在载体带供应部110、124的上方可以配置用于检测芯片32的位置的第一上相机200,在晶圆作业台160的上方可以配置用于检测晶圆40上的芯片42中要提取的芯片的位置的第二上相机202。并且,在第二芯片转送单元180的上方可以配置用于检查位于芯片梭182上的芯片32、42的第三上相机204。
48.第一、第二、第三上相机200、202、204可以构成为能够通过第二相机驱动部206向水平方向例如x轴方向移动。另外,在第一芯片转送单元170的下方可以配置用于观测被采摘器172提取的芯片32、42的第二下相机210。第二下相机210可以用于纠正被采摘器172提取的芯片32、42的姿势。
49.以下,说明根据本发明的实施例的焊接位置确定及校正方法。当使用普通视觉数据的焊接头132的对准方法时,使用上排列相机146识别芯片32上的图案后,使焊接单元130移动并将芯片32、42焊接到基板20上。当多层层叠时,识别位于基板20的芯片后,在芯片的上方焊接芯片。当基于普通视觉数据的对准方法时,用于焊接位置确定的校准(calibration)方法按照焊接位置误差值的平均数据来设定。在此情况下,存在不能反映随着持续执行焊接而产生的热量引起的误差的问题。
50.由此,本发明的实施例在焊接装置的适合位置配置温度传感器,使用由温度传感
器测定到的温度值来校正用于焊接的焊接单元130的驱动值。更具体地,可以是,推测从在芯片32上焊接芯片32、42之后执行的检查结果(pbi)导出的焊接位置误差值和温度值之间的相互关系,反映在之后的焊接过程中测定到的温度值来校正焊接单元130的驱动值,从而执行焊接。更具体地,提供如下方法:将通过焊接检查结果所提取的焊接误差和温度值的相互关系实现为线性回归模型(linear regression model),使用该线性回归模型来确定及校正焊接单元130的移动量(例如:移动距离)。以下,参照图3以及图4,以对沿着门吊136、138的移动导向件141、142移动的焊接单元130的移动距离进行校正的情况的例子为中心进行说明。不仅是如图3以及图4那样的一维移动,当然可以在二维以及三维驱动中适用本发明。
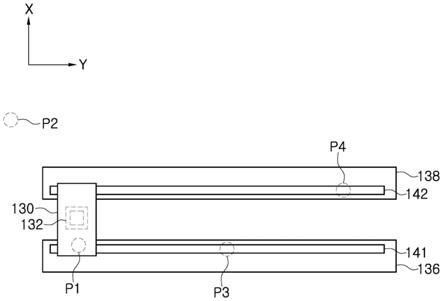
51.图3以及图4示出根据本发明的实施例的焊接装置以及焊接装置中的温度传感器的配置的例子。图3示出从侧面观察的焊接装置,图4示出从上方观察的焊接装置。
52.参照图3以及图4,在作业台102的上方设置门吊136、138,作为门吊136、138的一部分而提供用于焊接单元130的单元的水平方向移动的移动导向件141、142。焊接单元130可以沿着移动导向件141、142向焊接位置移动后将芯片32、42焊接到基板20上。由于随着焊接单元130沿着移动导向件141、142移动所产生的摩擦等而产生的热量可能引起在朝向焊接位置的移动距离中产生误差。
53.根据本发明的实施例,可以使用2个以上的温度传感器来校正用于通过利用了回归分析模型的线性回归式进行焊接的移动量。此时,可以按照对焊接单元130的移动带来影响的重要顺序在各位置p1、p2、p3以及p4设置温度传感器。根据本发明的一实施例,可以使用2个温度传感器,此时,可以是,在焊接单元130的一部分位置p1设置第一温度传感器,为了测定焊接装置周边的空气而在焊接装置周边p2设置第二温度传感器。
54.在又另一实施例中,为了高的精密度补偿,可以配置附加性的温度传感器。例如,可以在供焊接单元130移动的第一移动导向件141的一部分p3配置第三温度传感器。另外,可以在第二移动导向件142的一部分p4可以配置第四温度传感器。配置第三温度传感器的位置p3和配置第四温度传感器的位置p4当从侧面观察时可以沿着对角方向配置成不重叠,由此可以将更多种参数反应于线性回归式。
55.换句而言,门吊可以包括提供用于焊接单元130水平移动的路径的第一移动导向件141以及第二移动导向件142。在此,从设置于第一移动导向件141的第三温度传感器提供的第一移动导向件141的温度值(第三温度值)可以与第一温度值以及第二温度值一起反映于线性回归式。同样,可以基于焊接检查结果,校正与第一加权值、第二加权值一起适用于第三温度值的第三加权值。另外,从设置于第二移动导向件142的第四温度传感器提供的第二移动导向件142的温度值(第四温度值)可以与第一温度值、第二温度值、第三温度值一起反映于线性回归式。同样,可以基于焊接检查结果,校正与第一加权值、第二加权值、第三加权值一起适用于第四温度值的第四加权值。
56.通过由温度传感器测定到的温度值用作参数的线性回归式而反映热变形带来的误差来校正用于焊接的移动量,从而能够实现焊接精密度的提高以及迅速焊接。例如,在如以下数学式1那样的线性回归式中,当移动距离校正量设为y时,x1、x2、
…
、xn是温度值,β1、β2、
…
、β3相当于按每个传感器适用于温度值的加权值。β0是偏移值,可以相当于事先设定或反映了过去焊接误差等的值。
57.[数学式1]
[0058]
y=β0 β1x1 β2x2
…
βnxn[0059]
即,对焊接单元130的驱动进行控制的控制部可以基于反映有由温度传感器测定到的温度值的加权和的线性回归式,确定焊接单元130的移动距离。考虑在焊接之后检查步骤中检测到的焊接误差来改变各加权值。作为用于校正线性回归式的加权值的方法,可以适用各种机器学习算法(例如:最小二乘近似法(least square approximation),ml(maximum likelihood;最大似然)估计或者ransac(random sample consensus;随机抽样一致算法))。
[0060]
在本发明的实施例中,控制部可以基于从设置于焊接单元130的第一温度传感器提供的焊接单元130的温度值(第一温度值)和从设置于焊接单元130周边的第二温度传感器提供的焊接单元130周边的温度值(第二温度值)的加权和,确定焊接单元130的移动量。
[0061]
另外,控制部可以基于针对基板20上的芯片32、42的焊接检查结果,校正适用于第一温度值的第一加权值以及适用于第二温度值的第二加权值。
[0062]
图5是示出根据本发明的实施例的焊接方法的流程图。图5的工作可以通过上述的控制部(处理器)来执行。
[0063]
根据本发明的实施例的焊接方法可以包括使基板20位于作业台102上的步骤(s505)、确认基板20上的焊接位置的步骤(s510)、为了使焊接单元130位于焊接位置上而使焊接单元130移动的步骤(s515)以及在基板20上的焊接位置焊接芯片32、42的步骤(s520)。根据本发明的实施例,使焊接单元130移动的步骤(s515)可以包括从设置于焊接单元130的第一温度传感器获取第一温度值的步骤、从设置于焊接装置周边的第二温度传感器获取第二温度值的步骤以及基于第一温度值以及第二温度值的加权和来确定焊接单元130的移动距离的步骤。
[0064]
在一实施例中,焊接方法可以还包括基于针对基板20上的芯片32、42的焊接检查结果来校正适用于第一温度值的第一加权值以及适用于第二温度值的第二加权值的步骤。
[0065]
在一实施例中,使焊接单元130移动的步骤(s515)可以还包括从设置于在门吊136、138中提供用于焊接单元130水平移动的路径的第一移动导向件141中的第一温度传感器获取与第一移动导向件141的温度相对应的第三温度值的步骤。
[0066]
在一实施例中,使焊接单元130移动的步骤(s515)可以包括基于第一温度值、第二温度值以及第三温度值的加权和来确定焊接单元130的移动距离的步骤。
[0067]
在一实施例中,使焊接单元130移动的步骤(s515)可以还包括从设置于在门吊136、138中提供用于焊接单元130水平移动的路径的第二移动导向件142中的第一温度传感器获取与第二移动导向件142的温度相对应的第四温度值的步骤。
[0068]
在一实施例中,使焊接单元130移动的步骤可以包括基于第一温度值、第二温度值、第三温度值以及第四温度值的加权和来确定焊接单元130的移动距离的步骤。
[0069]
在一实施例中,焊接方法可以还包括基于针对基板20上的芯片32、42的焊接检查结果来校正适用于第一加权值、第二加权值、第三加权值以及第四温度值的第四加权值的步骤。
[0070]
以上,说明了本发明的各种实施例,到此为止参照的附图和记载的发明的详细说明只是本发明的示例,其仅用作用于说明本发明的目的,并不是用于意义限定或限制权利
要求书中记载的本发明的范围。因而本技术领域的具有通常知识的人将会理解根据其能够进行各种变形及等同的其它实施例。因此,本发明的真实技术保护范围应通过所附的权利要求书的技术构思来定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
