1.本发明涉及通信技术领域,尤其涉及一种双工器、网络设备、控制方法、电子设备及存 储介质。
背景技术:
2.现有的odu(out door unit,室外单元)产品采用双工器设计。现有的双工器,工作频 率一般不可调,灵活性差,适用范围较窄。例如,设备商根据运营商的双工器需求频段发货, 但每个频段(如23g为21.2g~23.6g)都分为好几个子带,为了及时发货,针对不同子带都 需要准备一定量的双工器备件库存,容易造成待滞。
技术实现要素:
3.本发明实施例的主要目的在于提出一种双工器、网络设备、控制方法、电子设备及存储 介质,旨在通过控制介质调谐部件与滤波器的相对位置,从而达到调节双工器的工作频率的 目的,提高双工器的灵活性和适用范围,进而减少生产商的库存压力。
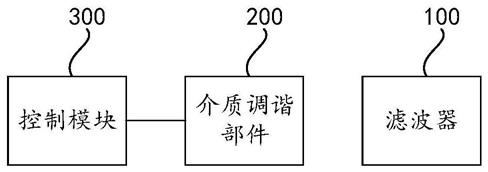
4.为实现上述目的,本发明实施例提供了一种双工器,包括:
5.滤波器;
6.介质调谐部件;
7.控制模块,所述控制模块与所述介质调谐部件连接,用于控制所述介质调谐部件与所述 滤波器的相对位置,以调节所述双工器的工作频率。
8.为实现上述目的,本发明实施例还提出了一种网络设备,包括:
9.前述的双工器;
10.主控模块,所述主控模块与所述双工器连接,用于发送控制信号至所述双工器,以调节 所述双工器的工作频率。
11.为实现上述目的,本发明实施例还提出了一种双工器控制方法,所述双工器包括滤波器 和介质调谐部件,所述方法包括:
12.获取控制信号;
13.根据所述控制信号输出驱动信号以控制所述介质调谐部件与所述滤波器的相对位置。
14.为实现上述目的,本发明实施例还提供了一种电子设备,所述电子设备包括存储器、处 理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计 算机程序时实现前述方法。
15.为实现上述目的,本发明实施例还提供了一种存储介质,用于计算机可读存储,所述存 储介质存储有一个或者多个程序,所述一个或者多个程序可被一个或者多个处理器执行,以 实现前述方法。
16.本发明提出的双工器、网络设备、控制方法、电子设备及存储介质,通过控制介质调谐 部件与滤波器的相对位置,改变滤波器等效电路的电抗参数,从而改变滤波器的属性
参数, 进而达到调节双工器的工作频率的目的。当需要多种频率的双工器时,可通过调节介质调谐 部件与滤波器的相对位置,调节双工器的工作频率,提高双工器的灵活性和适用范围,从而 避免针对不同子带都需要准备一定量的双工器备件库存的问题,进而减少生产商的库存压力。
17.本技术的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而 易见,或者通过实施本技术而了解。本技术的目的和其他优点可通过在说明书、权利要求书 以及附图中所特别指出的结构来实现和获得。
附图说明
18.图1是本发明第一方面一种实施例提供的双工器的结构示意图。
19.图2是本发明第一方面一种实施例提供的滤波器的结构示意图
20.图3是本发明第一方面另一种实施例提供的双工器的结构示意图。
21.图4是本发明第一方面另一种实施例提供的双工器的结构示意图。
22.图5是本发明第一方面另一种实施例提供的双工器的结构示意图。
23.图6是本发明第一方面另一种实施例提供的双工器的结构示意图。
24.图7是本发明第一方面另一种实施例提供的双工器的结构示意图。
25.图8是本发明一种实施例e面滤波器的等效电路图。
26.图9是本发明第一方面另一种实施例提供的双工器的结构示意图。
27.图10是本发明第一方面另一种实施例提供的双工器的结构示意图。
28.图11是本发明第一方面另一种实施例提供的双工器的结构示意图。
29.图12是本发明第二方面一种实施例提供的网络设备的结构示意图。
30.图13是本发明第三方面一种实施例提供的双工器控制方法的流程图。
31.图14是本发明第三方面另一种实施例提供的双工器控制方法的流程图。
32.图15是本发明第三方面另一种实施例提供的双工器控制方法的流程图。
33.图16是本发明第三方面另一种实施例提供的双工器控制方法的流程图。
34.图17是本发明第三方面另一种实施例提供的双工器控制方法的流程图。
35.图18是本发明第三方面另一种实施例提供的双工器控制方法的流程图。
36.附图标记:
37.滤波器100、介质调谐部件200、控制模块300、处理单元310、驱动单元320、电机单 元330、升降组件331、传动组件332、齿轮3321、螺纹轴3322、马达333、限位组件334、 霍尔传感器335、存储单元340、壳体400、齿轮箱410、升降板420、限位柱421、限位销 422、双工器500、主控模块600。
具体实施方式
38.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发 明进行进一步详细说明。应当理解,此处所描述的在一些实施例中实施例仅仅用以解释本发 明,并不用于限定本发明。不冲突的情况下,本技术中的实施例及实施例中的特征可以相互 任意组合。
39.在后续的描述中,使用用于表示元件的诸如“模块”、“部件”或“单元”的后缀仅为
器140、接收隔离器150((按箭头方向传输),到达接收波导口160,进入odu的cpu,从而 实现发射信号和接收信号的带通滤波。
53.在一些实施例中,控制模块300可采用tfcb(tunable filter controlled board,可 调滤波器控制板)。tfcb可作为独立模块直接组装在双工器上,通过12pin接口线和odu整 机的cpu通信,接收来自cpu的控制信号。
54.在一些实施例中,如图3所示,控制模块300包括:
55.处理单元310,处理单元310用于获取控制信号,并根据控制信号输出驱动信号;
56.驱动单元320,驱动单元320与处理单元310连接,用于接收驱动信号,并根据驱动信 号驱动电机单元;
57.电机单元330,电机单元330分别与驱动单元320、介质调谐部件200连接,用于控制介 质调谐部件200与滤波器100的相对位置。
58.在一些实施例中,控制模块300包括依次连接的处理单元310、驱动单元320和电机单 元330。处理单元310获取来自cpu的控制信号,根据控制信号输出驱动信号给驱动单元320, 驱动单元320根据驱动信号驱动电机单元330,电机单元330带动介质调谐部件200发生位 移,使得介质调谐部件200与滤波器100的相对位置发生改变,从而调节双工器的工作频率。
59.在一些实施例中,处理单元310可采用处理器或控制器(例如plc控制器、pid控制器 等)。驱动单元320可采用电机驱动芯片。
60.在一些实施例中,如图4所示,电机单元330包括:
61.升降组件331,升降组件331与介质调谐部件200连接;
62.传动组件332,传动组件332与升降组件331连接,用于控制升降组件331的位移,以 控制介质调谐部件200与滤波器100的相对位置;
63.马达333,马达333分别与驱动单元320、传动组件332连接,用于驱动传动组件332。
64.在一些实施例中,电机单元330包括依次连接的马达333、传动组件332和升降组件331。 驱动单元320驱动马达333,马达333带动传动组件332转动,传动组件332带动升降组件 331上升或下降,升降组件331与介质调谐部件200固定连接,进而带动介质调谐部件200 发生位移,使得介质调谐部件200与滤波器100的相对位置发生改变,从而调节双工器的工 作频率。
65.在一些实施例中,升降组件331可采用升降板,升降板具有通孔,介质调谐部件200通 过该通孔与升降板固定连接,升降板上升或下降带动介质调谐部件200发生位移,使得介质 调谐部件200与滤波器100的相对位置发生改变,从而调节双工器的工作频率。
66.在一些实施例中,如图5所示,传动组件332包括:
67.齿轮3321,齿轮3321与马达333连接;
68.螺纹轴3322,螺纹轴3322与齿轮3321连接,螺纹轴3322与升降组件331螺纹连接, 螺纹轴3322用于跟随齿轮3321转动,以控制升降组件331的位移。
69.在一些实施例中,传动组件332包括连接的齿轮3321和螺纹轴3322,马达333带动齿 轮3321转动,齿轮3321带动螺纹轴3322旋转,螺纹轴3322带动升降组件331上升或下降, 升降组件331与介质调谐部件200固定连接,进而带动介质调谐部件200发生位移,使得介 质调谐部件200与滤波器100的相对位置发生改变,从而调节双工器的工作频率。
70.需要说明的是,传动组件332如果采用皮带轮传动,由于皮带存在硫化和老化风险,且 皮带低温下伸张力不够,会出现温度在-40度时无法传动的问题。本实施例采用齿轮传动, 可以很好地解决上述问题。此外,本实施例采用螺纹轴连接齿轮和升降组件,由于螺纹轴可 以精准控制传动行程,因此可以有效提高升降组件的位移精度以及零点位置的校准精度。
71.在一些实施例中,如图6所示,电机单元330还包括:
72.限位组件334,限位组件334用于限制介质调谐部件200的位移;
73.霍尔传感器335,霍尔传感器335与控制模块300连接,用于检测介质调谐部件200的 位移数据并发送给控制模块300;
74.控制模块300还用于根据位移数据确定介质调谐部件200的零点位置。
75.在一些实施例中,电机单元330还包括限位组件334和霍尔传感器335。限位组件334 用于限制介质调谐部件200的位移。值得说明的是,由于升降组件331与介质调谐部件200 固定连接,因此介质调谐部件200的位移数据也可以叫做升降组件331的位移数据。霍尔传 感器335检测升降组件331的位移数据并发送给控制模块300的处理单元310,处理单元310 根据升降组件331的位移数据确定介质调谐部件200的零点位置。值得说明的是,由于升降 组件331与介质调谐部件200固定连接,因此介质调谐部件200的零点位置也可以叫做升降 组件331的零点位置。
76.在一些实施例中,霍尔传感器335检测升降组件331的位移数据的具体方式可以为:在 齿轮3321上安装多个磁铁,齿轮3321转动时,霍尔传感器335会实时检测齿轮3321的转动, 而齿轮3321的转动与升降组件331产生的位移数据的关系是已知的,因此,霍尔传感器335 通过检测齿轮3321的转动即可检测升降组件331的位移数据。
77.在一些实施例中,霍尔传感器335也可以采用其他磁性传感器代替。
78.在一些实施例中,升降组件331的零点位置包括机械零点和电气零点。机械零点为升降 组件331与限位组件334相匹配的位置,电气零点与机械零点相差预设个驱动步进值,即升 降组件331到达机械零点后,再输出预设个驱动步进值的驱动信号控制升降组件331移动一 定的距离,即可到达电气零点。具体地,系统上电后,输出足够的驱动信号,控制升降组件 331一直下降,到达与限位组件334相匹配的位置,此时马达333无法再转动,霍尔传感器 335也不再向处理单元310反馈升降组件331的位移数据,即认为升降组件331到达机械零 点。继续控制升降组件331上行一定的距离,即可到达电气零点。后续每次调节双工器的工 作频率均以电气零点为基准,即每次调节双工器的工作频率都先控制升降组件331回到电气 零点,由于升降组件331与介质调谐部件200固定连接,升降组件331回到电气零点相当于 介质调谐部件200回到零点,再控制介质调谐部件200与滤波器100的相对位置发生改变, 从而调节双工器的工作频率。
79.需要说明的是,每次调节双工器的工作频率,均以升降组件331回到电气零点为基准, 而不以升降组件331回到机械零点为基准,可以避免每次调节频率时升降组件331都需要到 达与限位组件334相匹配的位置所带来的组件的磨损和碰撞,延长组件的使用时间。
80.本实施例采用霍尔传感器 机械零位和电气零位进行检测,而不采用光电器件(例如红外 传感器或光传感器)进行检测,是因为采用光电器件可能会由于光线遮挡等原因,导致检测 的零点位置不够准确,进而导致调节的双工器的工作频率不够准确。因此,本实
施例采用霍 尔传感器 机械零位和电气零位进行零点位置的检测,不仅可以提高检测精度,还可以解决引 入光电器件带来的成本问题。
81.在一些实施例中,如图7所示,控制模块300还包括:
82.存储单元340,存储单元340与处理单元310连接,存储单元340用于存储控制信号与 驱动步进值的映射关系;
83.处理单元310用于根据控制信号获取对应的驱动步进值,根据驱动步进值输出驱动信号。
84.在一些实施例中,控制模块300还包括存储单元340,存储单元340用于存储控制信号 与驱动步进值的映射关系。处理单元310接收到来自odu的cpu的控制信号,从存储单元中 调用控制信号与驱动步进值的映射关系,根据控制信号获取对应的驱动步进值,根据驱动步 进值输出驱动信号。
85.结合上述,每次调节双工器的工作频率时,odu的cpu发送与双工器的工作频率对应的 控制信号给处理单元310。处理单元310先控制升降组件331回到电气零点,再根据控制信 号查找对应的驱动步进值,根据驱动步进值输出对应的驱动信号,驱动升降组件331(或马 达333)走对应的步进值,即可控制介质调谐部件200与滤波器100的相对位置发生改变, 从而调节双工器的工作频率到需要的频率。
86.在一些实施例中,滤波器100包括:
87.壳体,壳体内设置有金属膜片,壳体中间形成腔体;
88.介质调谐部件200置于腔体内。
89.在一些实施例中,滤波器100为e面滤波器。e面滤波器可视为金属膜片与空波导的交 替级联,金属膜片可等效为t型网络,空波导等效为平行双线,其等效电路如图8所示,x
s1
、 x
s2
、x
s3
和x
s4
为等效串联电抗,x
p1
、x
p2
为等效并联电抗。改变介质调谐部件200在腔体 内的位置,即改变介质调谐部件200在e面滤波器相对金属膜片的位置,可以改变等效串联 电抗x
s1
、x
s2
、x
s3
和x
s4
和等效并联电抗x
p1
、x
p2
的值,从而改变e面滤波器的属性参数, 进而调节双工器的工作频率。
90.需要说明的是,在一些实施例中,如图9所示,驱动单元320、电机单元330、发射波导 口130、接收波导口160和天线波导口190一体化设计,并且具有壳体400,壳体400埋设有 金属膜片,以形成e面滤波器。
91.下面以一个具体的实施例说明本发明的双工器的工作原理。如图10所示,齿轮箱410、 螺纹轴3322、升降板420、介质调谐部件200。霍尔传感器335、马达333、齿轮3321均集 成在齿轮箱410内。如图11所示,升降板420上设置有限位柱421,螺纹轴3322上设置有 限位销422。需要说明的是,反向驱动信号用于驱动升降组件反向位移,反向位移是指升降 组件朝着靠近限位组件的方向进行位移。正向驱动信号用于驱动升降组件正向位移,正向位 移是指升降组件朝着远离限位组件的方向进行位移。
92.1)双工器开机,控制模块输出足够的反向驱动信号,马达333正转,带动螺纹轴3322 顺时针转动,控制升降板420下降(即反向位移),直至升降板420上的限位柱421与限位销 422接触(图11即为限位柱421与限位销422接触时的结构示意图),这点的位置即为机械 零点。
93.2)到达机械零点后,马达333无法再转动,霍尔传感器335不再反馈信号。可以设置
连 续n个反向驱动信号内未接收到霍尔传感器335的反馈信号,就确定已经到达机械零点。
94.3)控制模块继续输出足够的正向驱动信号,马达333反转,带动螺纹轴3322逆时针转 动,可设置输出固定数量的正向驱动信号,控制升降板420上升(即正向位移)一定的安全 距离,这点的位置即为电气零点;
95.4)电气零点位置确认后,每次调节双工器的工作频率均以此电气零点为基准,进行介质 调谐部件200与e面滤波器的相对位置的准确调节,从而达到调节双工器的工作频率目的。
96.第二方面,如图12所示,本发明实施例提供了一种网络设备,包括:
97.如第一方面所述的双工器500;
98.主控模块600,主控模块600与双工器500连接,用于发送控制信号至双工器500,以调 节双工器500的工作频率。
99.在一些实施例中,主控模块600即为第一方面所述的odu的cpu。双工器500与cpu通 信连接,接收cpu发来的控制信号,根据控制信号调节双工器500的工作频率。具体的调节 过程请参照第一方面的实施例的描述,此处不再赘述。
100.第三方面,本发明实施例提供了一种双工器控制方法,应用于第一方面所述的双工器。 在一些实施例中,如图13所示,该方法包括:
101.步骤s100:获取控制信号;
102.步骤s200:根据控制信号输出驱动信号以控制介质调谐部件与滤波器的相对位置。
103.在一些实施例中,双工器中的介质调谐部件与滤波器(内部金属膜片)的相对位置是决 定双工器的电性能(例如工作频率)的重要因素之一。双工器获取控制信号,根据控制信号 输出驱动信号以控制介质调谐部件与滤波器的相对位置,从而达到调节双工器的工作频率的 目的,提高双工器的灵活性和适用范围,进而减少生产商的库存压力。
104.在一些实施例中,如图14所示,步骤s200包括:
105.步骤s210:根据控制信号获取对应的驱动步进值;
106.步骤s220:根据驱动步进值输出驱动信号以控制介质调谐部件与滤波器的相对位置。
107.在一些实施例中,双工器接收到来自odu的cpu的控制信号,从存储单元中调用控制信 号与驱动步进值的映射关系,根据控制信号获取对应的驱动步进值,根据驱动步进值输出驱 动信号。
108.在一些实施例中,如图15所示,步骤s100之前,还包括:
109.步骤s110:输出第一反向驱动信号以控制升降组件反向位移到达与限位组件相匹配的位 置,并持续获取升降组件的位移数据;
110.步骤s120:若连续n个驱动步进值的反向驱动信号未获取到对应的位移数据,则确定升 降组件到达机械零点,其中,n为第一预设值。
111.在一些实施例中,调节双工器的工作频率之前,需要对双工器的零点位置进行检测和校 准。具体地,双工器先输出第一反向驱动信号,控制升降组件反向位移到达与限位组件相匹 配的位置,并持续获取升降组件的位移数据,目的在于检测升降组件是否到达机械零点。若 连续n个驱动步进值的第二反向驱动信号未获取到对应的位移数据,说明升降
组件已经到达 与限位组件相匹配的位置,此时马达无法再转动,也就无法带动升降组件继续位移。因此, 若连续n个驱动步进值的反向驱动信号内未获取到对应的位移数据,则确定升降组件到达机 械零点。其中,n为第一预设值。在实践过程中,可能由于电气传输等原因导致漏获取位移 数据,如果检测未获取到位移数据就马上确定升降组件到达机械零点,则可能发生误判。本 实施例通过连续n个驱动步进值的第二反向驱动信号未获取到对应的位移数据才确定升降组 件到达机械零点的判断机制,减少了误判的概率,有效提高了机械零点的检测精度。
112.优选地,经过实验,n设置为10较佳,既可以提高机械零点的检测精度,又可以避免检 测时间过长。
113.在一些实施例中,如图16所示,步骤s120之后,还包括:
114.步骤s130:输出m个驱动步进值的第一正向驱动信号以控制升降组件正向位移,以使升 降组件到达电气零点,其中,m为第二预设值。
115.在一些实施例中,确定升降组件到达机械零点之后,双工器继续输出m个驱动步进值的 第一正向驱动信号,控制升降组件正向位移,以使升降组件到达电气零点。其中,m为第二 预设值,且已在系统中预设。后续每次调节双工器的工作频率,均以升降组件回到电气零点 为基准。
116.需要说明的是,每次调节双工器的工作频率,均以升降组件回到电气零点为基准,而不 以升降组件回到机械零点为基准,可以避免每次调节时升降组件都需要到达与限位组件相匹 配的位置所带来的组件的磨损和碰撞,延长组件的使用时间。
117.本实施例采用霍尔传感器 机械零位和电气零位进行检测,而不采用光电器件(例如红外 传感器或光传感器)进行检测,是因为采用光电器件可能会由于光线遮挡等原因,导致检测 的零点位置不够准确,进而导致调节的双工器的工作频率不够准确。因此,本实施例采用霍 尔传感器 机械零位和电气零位进行零点位置的检测,不仅可以提高检测精度,还可以解决引 入光电器件带来的成本问题。
118.在一些实施例中,如图17所示,步骤s120之后,还包括:
119.步骤s140:输出第二正向驱动信号以控制升降组件从机械零点正向位移,持续记录驱动 步进值,并持续获取升降组件的位移数据;
120.步骤s150:若连续k个驱动步进值的第三正向驱动信号未获取到对应的位移数据,则判 断记录的驱动步进值是否满足第三预设值;
121.步骤s160:根据判断结果验证机械零点。
122.在一些实施例中,控制升降组件到达电气零点之后,还需要验证机械零点(或电气零点) 是否正确。具体地,控制升降组件到达电气零点之后,双工器继续输出第二正向驱动信号, 控制升降组件从机械零点正向位移,持续记录驱动步进值,并持续获取升降组件的位移数据。 若连续k个驱动步进值的第三正向驱动信号未获取到对应的位移数据,说明升降组件已经位 移到无法位移的地方(例如图10的齿轮箱),无法再继续位移。此时判断记录的驱动步进值 是否满足第三预设值。若满足第三预设值,则机械零点位置准确。可以理解的是,对于运营 商或生产厂商来说,从机械零点到升降组件无法位移的地方的距离是一定的,那么驱动升降 组件从机械零点位移到无法位移的地方所需的驱动步进值的数量也是一定的。
123.举例说明,驱动升降组件从机械零点位移到无法位移的地方所需的驱动步进值为4200 个,机械零点与电气零点的驱动步进值为20个。首先,输出第一反向驱动信号控制升降组件 反向位移到达与限位组件相匹配的位置,此时马达无法转动,霍尔传感器也不再反馈升降组 件的位移数据,初步确定升降组件已到达机械零点。然后继续输出10个(即n=10)驱动步 进值的第二反向驱动信号,若在这10个驱动步进值的第二反向驱动信号内持续未获取到升降 组件的位移数据,则确定升降组件已到达机械零点。然后继续输出20个(即m=20)驱动步 进值的第一正向驱动信号,驱动升降组件正向位移到电气零点。此时,记录的驱动步进值为 20。然后继续输出第二正向驱动信号,驱动升降组件继续正向位移。当升降组件继续正向位 移到无法位移的地方,无法再继续位移。继续输出10个(即k=10)驱动步进值的第三正向 驱动信号,若在这10个驱动步进值的第三正向驱动信号内持续未获取到升降组件的位移数 据,则判断记录的驱动步进值是否满足第三预设值。若此时记录的驱动步进值为4210,则正 好满足第三预设值(由于驱动升降组件从机械零点位移到无法位移的地方所需驱动步进值为 4200,后续又多输出了10个驱动步进值,所以第三预设值理论上为4210),以此验证升降组 件的电气零点的位置是正确的。若升降组件的电气零点的位置是错误的,则重新执行上述步 骤,重新验证升降组件的电气零点的位置是否是正确的。
124.需要说明的是,每次调节双工器的工作频率,均以升降组件回到电气零点为基准,而不 在上一次调节工作频率后升降组件所处的位置的基础上去调节,是因为若上一次调节工作频 率后升降组件所处的位置就已经存在误差,那么后续的频率调节就会使得误差继续叠加,调 节的频率越来越不准确。因此,本实施例每次调节双工器的工作频率,均以升降组件回到电 气零点为基准,那么电气零点的校准和验证就显得尤为重要,能够有效避免之前的误差对本 次频率调节造成影响,进而提高了频率调节的准确度。
125.在一些实施例中,如图18所示,步骤s200包括:
126.步骤s210:根据控制信号获取第三反向驱动信号和第四正向驱动信号;
127.步骤s220:输出第三反向驱动信号以控制升降组件到达电气零点;
128.步骤s230:输出第四正向驱动信号以控制介质调谐部件与滤波器的相对位置。
129.在一些实施例中,假设升降组件当前正好处于电气零点,则无需回到电气零点,双工器 直接根据控制信号获取对应的驱动步进值,根据驱动步进值输出第四正向驱动信号以控制介 质调谐部件与滤波器的相对位置。
130.在一些实施例中,假设升降组件当前没有处于电气零点,需要先回到电气零点,再开始 调节频率。若上一次调节双工器的工作频率到预设频率f1,双工器输出的驱动信号对应的驱 动步进值为x个,则此次调节双工器的工作频率时,需要先输出x个驱动步进值的反向驱动 信号(即第三反向驱动信号)控制升降组件回到电气零点。在一些实施例中,上一次输出的 驱动步进值的数量x需存储在存储单元中,双工器需从存储单元中获取x,再根据x输出x 个驱动步进值的反向驱动信号。控制升降组件回到电气零点后,接收odu的cpu发来的控制 信号,该控制信号表示此次双工器的工作频道需调节到哪个频率。从存储单元中调用控制信 号与驱动步进值的映射关系,根据控制信号获取对应的驱动步进值,根据驱动步进值输出第 四正向驱动信号,控制介质调谐部件与滤波器的相对位置,从而调节双工器的工作频率。
131.第四方面,本发明实施例提供了一种电子设备,电子设备包括存储器、处理器及存
储在 存储器上并可在处理器上运行的计算机程序,处理器执行计算机程序时实现:
132.如第三方面所述的双工器控制方法的步骤。
133.第五方面,本发明实施例提供了一种存储介质,用于计算机可读存储,存储介质存储有 一个或者多个程序,一个或者多个程序可被一个或者多个处理器执行,以实现:
134.如第三方面所述的双工器控制方法的步骤。
135.本领域普通技术人员可以理解,上文中所公开方法中的全部或某些步骤、系统、设备中 的功能模块/单元可以被实施为软件、固件、硬件及其适当的组合。
136.在硬件实施方式中,在以上描述中提及的功能模块/单元之间的划分不一定对应于物理组 件的划分;例如,一个物理组件可以具有多个功能,或者一个功能或步骤可以由若干物理组 件合作执行。某些物理组件或所有物理组件可以被实施为由处理器,如中央处理器、数字信 号处理器或微处理器执行的软件,或者被实施为硬件,或者被实施为集成电路,如专用集成 电路。这样的软件可以分布在计算机可读介质上,计算机可读介质可以包括计算机存储介质 (或非暂时性介质)和通信介质(或暂时性介质)。如本领域普通技术人员公知的,术语计算 机存储介质包括在用于存储信息(诸如计算机可读指令、数据结构、程序模块或其他数据) 的任何方法或技术中实施的易失性和非易失性、可移除和不可移除介质。计算机存储介质包 括但不限于ram、rom、eeprom、闪存或其他存储器技术、cd-rom、数字多功能盘(dvd)或 其他光盘存储、磁盒、磁带、磁盘存储或其他磁存储装置、或者可以用于存储期望的信息并 且可以被计算机访问的任何其他的介质。此外,本领域普通技术人员公知的是,通信介质通 常包含计算机可读指令、数据结构、程序模块或者诸如载波或其他传输机制之类的调制数据 信号中的其他数据,并且可包括任何信息递送介质。
137.以上参照附图说明了本发明的优选实施例,并非因此局限本发明的权利范围。本领域技 术人员不脱离本发明的范围和实质内所作的任何修改、等同替换和改进,均应在本发明的权 利范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。