1.本发明涉及行为识别领域,特别是一种上下楼状态识别方法。
背景技术:
2.随着智能手表、智能眼镜等可穿戴设备的热用,现有智能硬件集成的传感器愈发完善且性能不断提升,可以采集用户的各类原始数据并进行分析利用。其中,位置信息和行为信息是最常用的用户数据,通过它们可以展开多种多样的精准服务,具有十分重要的价值。
3.本文档重点关注垂直维度上以人为载体的行为状态识别问题,主要在室内环境中,包括:平层状态、电梯上行状态、电梯下行状态、楼梯上行状态、楼梯下行状态、扶梯上行状态和扶梯下行状态。
4.目前,相关的方法仍有一些不足,主要包括:1)近年来提出基于加速度、气压、陀螺仪等传感器数据的模式识别方法较多,但此类方法通常需要提前采集大量样本进行训练,否则模型的样本依赖性较大,普适性较差;2)识别方法通常以独立时间片的识别为主,没有利用前后关联性或其他先验信息;3)一些考虑气压传感器的方法中没有考虑到其他影响气压的因素,比如快速的平层移动也会导致气压变化。
技术实现要素:
5.本发明公开了一种上下楼状态识别方法,通过以时间度量和以步数度量的两种速度联合判断,更符合人体行为模型;并引入时间关联性和定位关联性对识别结果修正,进一步提高识别准确率。本发明包括以下步骤:移动终端按第一周期读取气压采样值,按第二周期读取加速度采样值;按固定时间窗长获取对应的气压采样值和加速度采样值,计算该时间窗内的行走步数和高度变化差;根据时间窗长、行走步数和高度变化差,计算该时间窗内的的第一垂直速度和和第二垂直速度;根据第一垂直速度和第二垂直速度进行平层状态和上下楼状态识别,其中上下楼状态包括:电梯上行、电梯下行、楼梯上行、楼梯下行、扶梯上行和扶梯下行。
6.可选的,所述根据时间窗长、行走步数和高度变化差计算第一垂直速度和和第二垂直速度,其特征在于,所述第一垂直速度是指所述该时间窗内的高度随时间的变化速度,可以用所述高度变化差除以所述固定时间窗长的商表示;所述第二垂直速度是指所述该时间窗内的高度随行走步数的变化速度,可以用所述高度变化差除以所述行走步数的商表示。
7.可选的,所述根据第一垂直速度和第二垂直速度进行平层状态和上下楼状态识别,其特征在于,具体步骤包括:若所述第一垂直速度的绝对值小于第一垂直速度阈值,认为所述时间窗处于平层状
态;若所述第一垂直速度的绝对值大于等于第二垂直速度阈值且所述第一垂直速度为正,认为所述时间窗处于电梯上行状态;若所述第一垂直速度的绝对值大于等于第二垂直速度阈值且所述第一垂直速度为负,认为所述时间窗处于电梯下行状态;否则,根据所述第二垂直速度进行包括楼梯上行、楼梯下行、扶梯上行和扶梯下行的状态识别,包括:若所述第二垂直速度的绝对值大于等于第三垂直速度阈值且所述第二垂直速度为正,认为所述时间窗处于扶梯上行状态;若所述第二垂直速度的绝对值大于等于第三垂直速度阈值且所述第二垂直速度为负,认为所述时间窗处于扶梯下行状态;若所述第二垂直速度的绝对值小于第三垂直速度阈值且所述第二垂直速度为正,认为所述时间窗处于楼梯上行状态;若所述第二垂直速度的绝对值小于第三垂直速度阈值且所述第二垂直速度为负,认为所述时间窗处于楼梯下行状态。
8.可选的,所述根据第一垂直速度和第二垂直速度进行上下楼状态识别之后,还可以根据时间关联性对上下楼状态进行修正,具体步骤包括:对连续的上下楼状态序列按平层、上行、下行进行分段处理;对于上行段或下行段,根据所述高度变化差计算该段的累加高度变化差;对于上行段或下行段,统计所有上下楼状态的出现频率,并由大到小排序;根据上行段或下行段的累加高度变化差和上下楼状态的出现频率,对非平层的状态进行修正,包括:若累加高度变化差的绝对值小于设定层高阈值,则该段内的所有状态修正为平层状态;否则,若出排位第1的出现频率大于等于设定概率阈值,则该段内的所有状态修正为所述排位第1的出现频率对应的状态;否则,若该段内的状态有电梯上行或电梯下行,则将该段内的所有非平层状态都修正为电梯上行或电梯下行;否则,若该段内的状态有扶梯上行或扶梯下行,则将该段内的所有非平层状态都修正为扶梯上行或扶梯下行。
9.可选的,所述根据第一垂直速度和第二垂直速度进行上下楼状态识别之后,还可以根据定位信息对上下楼状态进行修正,具体步骤包括:对连续的上下楼状态序列按平层、上行、下行进行分段处理;对于上行段或下行段,若可以获取到该段内的gnss定位坐标,则将该段内的所有状态修正为平层状态;对于上行段或下行段,若可以获取到该段内的水平速度大于等于第一水平速度阈值,则将该段内的所有状态修正为平层状态。
10.其中,所述水平速度有多种获取方法,可以是通过gnss定位时由模块直接输出的,也可以是通过连续定位坐标和时间间隔估算的,还可以是通过加速度和陀螺仪进行姿态估计后积分计算的。
11.本发明的上述技术方案至少具有如下有益效果:采用本发明实施例,可以从以下2个方面改善上下楼状态识别方法:1)提出以时间度量
和以步数度量的两种速度共同进行上下楼状态识别的方法,更符合人体行为模型;2)考虑到气压变化的其他因素影响,引入基于时间关联性和定位信息的状态识别修正方法,进一步提高识别准确率。
附图说明
12.图1为本发明实施例一提供的一种上下楼状态识别方法的流程图。
13.图2为本发明实施例二提供的一种基于时间关联性的上下楼状态修正方法的流程图。
14.图3为本发明实施例三提供的一种基于定位信息的上下楼状态修正方法的流程图。
具体实施方式
15.为使本发明要解决的技术问题、技术方案和优点更加清楚,下面将结合附图及具体实施例进行详细描述。
16.图1为本发明实施例一提供的一种上下楼状态识别方法的流程图。如图1所示,包括以下步骤:s101:移动终端按第一周期t1读取气压采样值,按第二周期t2读取加速度采样值;s102:获取固定时间窗长tw内的气压采样值和加速度采样值,通过加速度采样值计算该时间窗内的行走步数ns,通过气压采样值计算该时间窗内的高度变化差hw;s103:根据时间窗长tw、行走步数ns和高度变化差hw计算第一垂直速度v1和第二垂直速度v2,其中:第一垂直速度vh1是指所述该时间窗内的高度随时间的变化速度,例如可表示为vh1=hw/tw;第二垂直速度vh2是指所述该时间窗内的高度随行走步数的变化速度,例如可表示为vh2=hw/(ns 1)s104:根据第一垂直速度vh1和第二垂直速度vh2进行上下楼状态识别。
17.具体的,所述根据第一垂直速度vh1和第二垂直速度vh2进行上下楼状态识别包括:1)若所述第一垂直速度vh1的绝对值小于第一垂直速度阈值v_thr_1,认为所述时间窗处于平层状态(state_fl);2)若所述第一垂直速度vh1的绝对值大于等于第二垂直速度阈值v_thr_2且所述第一垂直速度v1为正,认为所述时间窗处于电梯上行状态(state_lu);3)若所述第一垂直速度vh1的绝对值大于等于第二垂直速度阈值v_thr_2且所述第一垂直速度v1为负,认为所述时间窗处于电梯下行状态(state_ld);4)否则,根据所述第二垂直速度vh2进行进一步上下楼状态识别,包括:4a)若所述第二垂直速度vh2的绝对值大于等于第三垂直速度阈值v_thr_3且所述第二垂直速度为正,认为所述时间窗处于扶梯上行状态(state_eu);4b)若所述第二垂直速度vh2的绝对值大于等于第三垂直速度阈值v_thr_3且所述第二垂直速度为负,认为所述时间窗处于扶梯下行状态(state_ed);
4c)若所述第二垂直速度vh2的绝对值小于第三垂直速度阈值v_thr_3且所述第二垂直速度为正,认为所述时间窗处于楼梯上行状态(state_su);4d)若所述第二垂直速度vh2的绝对值小于第三垂直速度阈值v_thr_3且所述第二垂直速度为负,认为所述时间窗处于楼梯下行状态(state_sd)。
18.本实施例中,所述移动终端内嵌有加速度计和气压计模块,加速度计用于测量移动终端的空间线加速度,通常是三轴线加速度的原始值或模值;气压计用于测量移动终端的环境大气压力,通常是标量数据。气压受海拔高度、温度和环境气流影响,具有时变性,静态情况下气压p(单位:千帕)与海拔高度h(单位:米)的常见换算公式如下:h=44300*(1-(p/p0)^(1/5.256))式中,p0为标准大气压,即101.325千帕。
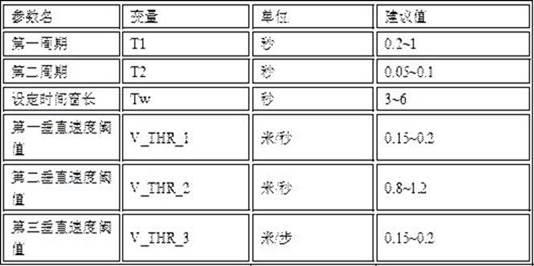
19.此外,下表给出本实施例所述步骤中涉及的相关参数的参考建议值:图2为本发明实施例二提供的一种基于时间关联性的上下楼状态修正方法的流程图,如图2所示,步骤包括:s201:对连续的上下楼状态序列按平层、上行、下行进行分段处理;s202:对于上行段或下行段,根据所述高度变化差计算该段的累加高度变化差hd:其中,s表示所述上行段或下行段内的所有时间窗的集合,i表示时间窗对应的序号。
20.s203:对于上行段或下行段,统计所有上下楼状态的出现频率,并由大到小排序;s204:根据上行段或下行段的累加高度变化差和上下楼状态的出现频率,对非平层的状态进行修正。
21.具体的,所述步骤s204包括:1)若累加高度变化差的绝对值小于设定层高阈值h_thr_1,则该段内的所有状态修正为平层状态(state_fl);2)否则,若出排位第1的出现频率大于等于设定概率阈值p_thr_1,则该段内的所有状态修正为所述排位第1的出现频率对应的状态;3)否则,若该段内的状态有电梯上行状态(state_lu)或电梯下行状态(state_ld),则
将该段内的所有非平层状态都修正为电梯上行状态或电梯下行。
22.例如,本实施例中所述设定层高阈值h_thr_1为3.5米。根据实施例一所述方法,携带移动设备在室内平层行走识别的上下楼状态序列如下:按照本实施例提供的方法,上述状态序列分为4段,其中上行段集合s1={2,3},累加高度变化差hd1=-0.99米;下行段集合s2={4},累加高度变化差hd2=1.01米。由于hd1和hd2均小于所述设定楼层h_thr_1,序号2,3,4的识别状态被修正为平层状态(state_fl)。
23.又如,本实施例中所述设定层高阈值h_thr_1为3.5米,设定概率阈值p_thr_1为0.6。根据实施例一所述方法,携带移动设备在室内步行楼梯上行2层识别的上下楼状态序列如下:按照本实施例提供的方法,上述状态序列分为3段,其中上行段集合s1={2,3,4,5},累加高度变化差hd1=6.09米,楼梯上行状态和扶梯上行状态出现概率分别为0.75和0.25。由于累加高度变化差hd1大于所述设定楼层h_thr_1且最高出现概率大于设定概率阈值p_thr_1,序号5的识别状态被修正为电梯上行状态(state_su)。
24.再如,本实施例中所述设定层高阈值h_thr_1为3.5米,设定概率阈值p_thr_1为0.6。根据实施例1所述方法,携带移动设备在室内乘坐电梯上行1层识别的上下楼状态序列如下:
按照本实施例提供的方法,上述状态序列分为3段,其中上行段集合s1={2,3},累加高度变化差hd1=3.98米,楼梯上行状态和电梯上行状态出现概率分别为0.5和0.5。由于累加高度变化差hd1大于所述设定楼层h_thr_1但最高出现概率小于设定概率阈值p_thr_1,序号2的识别状态被修正为电梯上行状态(state_lu)。
25.图3为本发明实施例三提供的一种基于定位信息的上下楼状态修正方法的流程图,如图3所示,步骤包括:s301:对连续的上下楼状态序列按平层、上行、下行进行分段处理;s302:对于上行段或下行段,若可以获取到该段内的gnss定位坐标,则将该段内的所有状态修正为平层状态;s303:对于上行段或下行段,若可以获取到该段内的水平速度大于等于第一水平速度阈值v_thr_4,则将该段内的所有状态修正为平层状态。
26.本实施例中,所述水平速度有多种获取方法,可以是通过gnss定位时由模块直接输出的,也可以是通过连续定位坐标和时间间隔估算的,还可以是通过加速度和陀螺仪进行姿态估计后积分计算的。
27.以上所述是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明所述原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
