1.本发明涉及一种流体操纵的线性驱动器,具有驱动器壳体和驱动环节,所述驱动环节能够通过流体力驱动相对于驱动器壳体做沿壳体纵向方向的线性驱动运动,其中,所述驱动环节具有驱动单元,所述驱动单元具有驱动活塞,所述驱动活塞在驱动器壳体中将两个沿壳体纵向方向彼此相继的驱动腔室彼此分开,所述驱动腔室分别与两个壳体通道中的一个连接,所述壳体通道分别以各自的侧向的联接开口在驱动器壳体的横向于壳体纵向方向定向的壳体侧面处通出并且能够用于供应和引出产生线性驱动运动的驱动流体。
背景技术:
2.由ep 1 574 283 b1已知的这种类型的线性驱动器具有长形的驱动器壳体和相对于该驱动器壳体能够移位的驱动环节,其中,所述驱动环节具有滑块体,所述驱动环节借助所述滑块体在驱动器壳体的外侧处能够线性移位地被引导。用于产生驱动环节的线性的驱动运动的驱动力能够由驱动流体产生,借助所述驱动流体能够以彼此协调的方式加载驱动器壳体的两个驱动腔室,所述驱动腔室通过驱动环节的驱动单元的驱动活塞流体密封地彼此分开。这两个驱动腔室中的每个与两个贯穿驱动器壳体的壳体通道中的一个连通,所述壳体通道分别以侧向的联接开口在外部在驱动器壳体的壳体侧面处通出。适用于供应和引出驱动流体的流体软管能够联接到侧向的联接开口处。
3.在de 197 20 100 c2中也说明了具有布置在驱动器壳体的壳体侧面处的侧向的联接开口的线性驱动器。jp-h10-339308 a也公开了这样的流体操纵的线性驱动器。
4.在大多数应用情况中,在侧向布置在流体操纵的线性驱动器的驱动器壳体处的联接开口非常好地适用于联接流体线路。然而,有时存在局部的(
ö
rtliche)条件,其中,对于用户来说更有利的会是:用户可以拥有将流体线路联接在驱动器壳体的与壳体侧面成直角地定向的壳体背面处这一可能性。对于这种情况,ep 0 868 965 a2公开了一种流体操纵的线性驱动器,其中,与两个驱动腔室连通的壳体通道经由轴向的联接开口在驱动器壳体的沿壳体纵向方向指向的壳体背面处通出。然而,对于不同的联接可能性提供两种不同结构类型的流体操纵的线性驱动器与不少的花费相关联。
技术实现要素:
5.本发明基于如下任务,即采取成本有利的措施,该措施为流体操纵的线性驱动器的用户提供用于对于驱动流体的供应和引出来说必要的联接措施的可变的可能性。
6.为了解决该任务,在流体操纵的线性驱动器中结合开头所提及的特征设置成,线性驱动器具有关于驱动器壳体独立的l形的加装联接部件,所述加装联接部件具有联接支腿和横向地从所述联接支腿突出的连接支腿,并且所述加装联接部件在使用位置中在外部如此加装到驱动器壳体处,使得连接支腿沿壳体纵向方向沿着壳体侧面延伸,并且联接支腿沿与该壳体纵向方向正交的壳体横向方向沿着驱动器壳体的横向于壳体侧面取向的壳体背面延伸,其中,所述加装联接部件由两个分开的联接部件通道贯穿,所述联接部件通道
一方面分别以连接开口如此在连接支腿的面向驱动器壳体的内部的支腿面处通出,使得所述联接部件通道分别与这两个侧向的联接开口中的一个连接,并且所述联接部件通道另一方面分别以能够用于供应和引出产生线性的驱动运动的驱动流体的、各自的轴向的联接开口在联接支腿的背离驱动器壳体的外部的支腿面处通出。
7.根据标准,根据本发明的线性驱动器具有两个布置在其驱动器壳体的横向于壳体纵向方向定向的壳体侧面处的侧向的联接开口,所述联接开口分别经由驱动器壳体的内部的壳体通道与两个驱动腔室中的一个连通,所述驱动腔室通过驱动环节的驱动单元的驱动活塞彼此分开。当要求局部的条件时,线性驱动器的用户拥有如下可能性,即直接将这两个侧向的联接开口用于联接流体线路,穿过所述流体线路能够供应和引出对驱动环节的线性的驱动运动的产生来说必要的驱动流体。但是,根据本发明的线性驱动器此外也还提供一种备选的可能性,即对于驱动流体的供应和引出来说必要的联接措施沿与壳体纵向方向重合的轴向方向在驱动器壳体的背侧处实行。这种可能性由线性驱动器的附加于驱动器壳体存在的加装联接部件给出,所述加装联接部件在使用位置中在外部如此加装或能够加装到驱动器壳体处,使得构造在其中的联接开口到达位于驱动器壳体的壳体背面的区域中并且在那里沿壳体纵向方向定向,从而其在背侧在驱动器壳体处形成可良好地接近的轴向的联接开口,以用于轴向的联接措施。即使具有装配好的加装联接部件,线性驱动器也具有紧凑的尺寸,因为加装联接部件具有l形的外形并且如此安置,使得被称为连接支腿的第一l形支腿沿着驱动器壳体的壳体侧面延伸并且被称为联接支腿的第二l形支腿沿着壳体背面延伸。在连接支腿的面向驱动器壳体的内部的支腿面处存在有两个贯穿加装联接部件的联接部件通道的连接开口,所述联接部件通道分别与这两个侧向的联接开口中的一个处于连接中,以便与这两个驱动腔室建立流体连接。此外,每个联接部件通道以已经提到的这两个轴向的联接开口中的一个在联接支腿的背离驱动器壳体的外部的支腿面处通出。因此,原则上设计成用于侧向的流体联接的线性驱动器能够通过加装独立的加装联接部件而被改装为用于背侧的、轴向的流体联接的线性驱动器。这种改装可能性不应该强制性地抛给线性驱动器的终端用户,而是在制造线性驱动器时从工厂交货时就已经能够被使用,其方式为,交付没有加装联接部件的、要用于侧向的流体联接措施的线性驱动器以及具有装配在使用位置中的加装联接部件的、要用于轴向的流体联接措施的线性驱动器。
8.本发明的有利的扩展方案从从属权利要求中得出。
9.l形的加装联接部件具有布置在联接支腿和连接支腿之间的过渡区段。在该过渡区段中,这两个联接部件通道适宜地沿驱动器壳体的壳体高度方向有间距地彼此相叠。壳体高度方向正交于壳体纵向方向以及与该壳体纵向方向正交的横向方向进行走向。壳体纵向方向是如下方向,壳体背面沿所述方向指向并且所述方向尤其涉及壳体背面的法向方向。壳体横向方向是如下方向,壳体侧面沿所述方向指向并且所述方向尤其涉及壳体侧面的法向方向。由于将这两个联接部件通道彼此相叠地布置在过渡区段中,线性驱动器能够以非常紧凑的长度和横向尺寸来实现。
10.优选地,每个联接部件通道具有构造在联接支腿中的联接通道区段并且具有构造在连接支腿中的连接通道区段。每个联接通道区段与配属于其的连接通道区段适宜地经由弓形的或弯曲的过渡通道区段连接,所述过渡通道区段在加装联接部件中围绕驱动器壳体的后部的角区域延伸,所述后部的角区域在过渡区域中位于壳体背面与壳体侧面之间。每
production)”。与原则上同样能够使用的层构造的衍生式方法(例如所谓的激光烧结)相反,能够借助clip技术在没有可见的层的情况下制造物体。此外,在这里,通过使用液态的初始材料还能够无问题地集成复杂的联接部件通道,因为在其中没有沉积如在激光烧结中通常使用的难以移除的粉末。
20.在优选的备选的设计方案中,加装联接部件多件式地进行构造。在这种情况下,该加装联接部件具有带有两个轴向的联接开口和两个连接开口的后部的连接开口的弯曲的后部的联接部件端部体以及具有带有两个连接开口的前部的连接开口的前部的联接部件端部体。这两个联接部件端部体彼此分开地制成,其中,其优选能够涉及以已经说明的方式衍生式地制成的结构部件。
21.在可行的设计方案中,这两个联接部件端部体在连接支腿的区域中可伸缩地直接插入到彼此中。通过选择合适的插入深度,能够使连接支腿的长度与驱动器壳体的结构长度匹配并且尤其与驱动器壳体的侧向的联接开口的彼此间的间距匹配。在备选于此并且同样有利的结构方式中,这两个联接部件端部体不直接插入到彼此中,而是通过布置在其间的管状体彼此连接,该管状体以彼此相对的端部区段插入到这两个联接部件端部体中。该管状体能够成本有利地由以米制件(meterware)存在的管状材料切割成期望的长度,其中,所述管状体能够构造为塑料管或还能够构造为金属管。为了制造不同结构长度的线性驱动器,能够成本有利地使用相同类型的前部的和后部的联接部件端部体,所述前部的和后部的联接部件端部体仅仅必须与能够容易制造的不同结构长度的管状体组合。
22.在简单并且紧凑的设计方案中,驱动环节仅仅包含唯一的驱动单元。该驱动单元包含驱动活塞并且适宜地包含与该驱动活塞连接的活塞杆。从驱动器壳体突出来的活塞杆实现驱动运动的量取(abgriff)。
23.如果在紧凑的尺寸的情况下应该能够产生高的驱动力,则推荐具有两个沿壳体横向方向彼此并排地布置的驱动单元的线性驱动器的设计方案。在此,这两个驱动单元中的一个形成第一驱动单元,该第一驱动单元将两个驱动腔室彼此分开,所述驱动腔室以进一步在上面说明的方式分别与两个壳体通道中的一个连接,所述壳体通道分别以各自的侧向的联接开口在壳体侧面处通出。第二驱动单元同样将两个沿壳体纵向方向彼此相继的驱动腔室彼此分开,所述驱动腔室为了进行流体供给分别经由驱动器壳体的各自的横向通道与配属于第一驱动单元的驱动腔室中的一个处于流体连接中。以这种方式,在受控地供应和引出驱动流体时始终实现这两个驱动单元的同步的相同方向的流体加载。
24.这两个驱动单元适宜地在驱动器壳体的外部经由驱动环节的轭部(jochteil)彼此固定连接,从而存在运动单元。
25.轭部优选涉及线性驱动器的在外部在驱动器壳体处借助于线性引导机构能够线性移位地进行支承的滑块体的组成部分。所述滑块体具有至少一个固定接口,在所述固定接口处能够固定有借助于线性的驱动运动进行运动的外部的构件、例如机器构件。如果驱动环节仅仅具有唯一的驱动单元,那么线性驱动器还能够配备有能够线性移位地引导的滑块体。
附图说明
26.随后,根据所附的附图更详细地阐述本发明。在附图中:
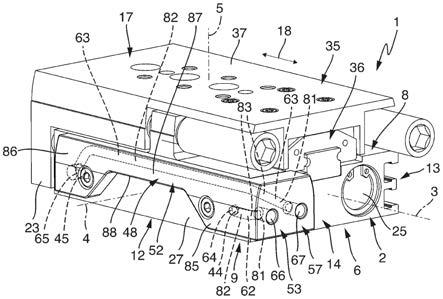
图1示出根据本发明的流体操纵的线性驱动器的优选的结构形式的等轴的后视图,所述线性驱动器具有装配在使用位置中的加装联接部件,图2示出在加装联接部件尚未装配在使用位置中的状态下的源于图1的线性驱动器的等轴的前视图,图3示出线性驱动器的根据源于图5的剖切面iii-iii的纵剖面,其中,在以点划线框住的局部图示中示出驱动器壳体在未装配加装联接部件时的状态,图4示出线性驱动器的根据源于图5的剖切面iv-iv的另外的纵剖面,图5示出线性驱动器的根据源于图3和4的剖切面v-v的横截面,图6示出多件式的加装联接部件的等轴的细节图示,图7示出图6的在组装其构件之前的加装联接部件,图8示出多件式的加装联接部件的另外的实施方式,以及图9示出图8的在组装多个构件中的一个构件之前的加装联接部件。
具体实施方式
27.其整体上以附图标记1进行标记的流体操纵的线性驱动器优选地构造成用于借助于压缩空气作为驱动流体进行操纵,然而还适用于借助于其它气态或还有液态的驱动流体进行操纵。
28.线性驱动器1具有优选地具有纵向外形的驱动器壳体2,所述驱动器壳体具有纵向轴线3、与该纵向轴线成直角的横向轴线4和与上面所提及的这两个轴线3、4又成直角的竖直轴线5。上面所提及的三个轴线的轴线方向在使用相应相同的附图标记的情况下在纵向轴线3的情况下被称为壳体纵向方向3,在横向轴线4的情况下被称为壳体横向方向4,并且在竖直轴线5的情况下被称为壳体高度方向5。
29.优选地,驱动器壳体2板形地或块形地进行设计。
30.驱动器壳体2具有沿壳体纵向方向3定向的壳体背侧6和关于此轴向相对的壳体前侧7。此外,驱动器壳体2具有沿壳体高度方向5定向的壳体上侧8和关于此相对的壳体下侧9。并且最后,驱动器壳体2具有两个沿壳体横向方向4定向的并且彼此相对的第一和第二侧向的纵向侧12、13。
31.在壳体背侧6的区域中,驱动器壳体2具有壳体背面14。壳体背面14沿壳体纵向方向3指向,其中,壳体纵向方向3优选代表壳体背面14的法向方向。在壳体前侧7处,驱动器壳体2具有优选与壳体背面14相同地取向的壳体前部面15。
32.此外,驱动器壳体2具有壳体侧面16,所述壳体侧面在壳体背面14与壳体前部面15之间围绕驱动器壳体2进行延伸。与此相应地,壳体侧面16由多个过渡到彼此中的侧面区段组装而成,其中,第一侧面区段16a构造在第一侧向的纵向侧12处,第二侧面区段16b构造在壳体下侧9处,第三侧面区段16c构造在第二侧向的纵向侧13处,并且第四侧面区段16d构造在壳体上侧8处。
33.优选地,驱动器壳体2在与纵向轴线3成直角的横截面中具有至少基本上矩形的外轮廓。
34.此外,线性驱动器1具有能够关于驱动器壳体2沿壳体纵向方向3线性地来回移位的驱动环节17。驱动环节17能够通过驱动流体驱动做通过双箭头表示的沿壳体纵向方向3
的线性的驱动运动18。驱动运动18尤其能够实施为来回的线性运动。
35.驱动环节17具有两个驱动单元21,所述驱动单元在下文中为了更好地区分还被称为第一驱动单元21a和第二驱动单元21b。这两个驱动单元21位于共同的、与竖直轴线5成直角的驱动平面22中。所述驱动单元沿壳体横向方向4彼此间隔开,其中,第一侧向的纵向侧12的第一驱动单元21a和第二侧向的纵向侧13的第二驱动单元21b相邻。
36.驱动单元21部分在驱动器壳体2内部并且部分在驱动器壳体2外部延伸。示范性地,所述驱动单元分别在壳体前部面15处从驱动器壳体2中突出来。所述驱动单元在驱动器壳体2外部彼此固定连接,从而所述驱动单元仅仅能够一致地进行运动。为了进行连接,示范性地设置有驱动环节17的在轴向上前置于壳体前部面15的轭部23。
37.每个驱动单元21在各自的构造在驱动器壳体2的内部中的壳体腔室24中延伸,所述壳体腔室优选柱状地设计轮廓。在下文中,配属于第一驱动单元21a的壳体腔室24还被称为第一壳体腔室24a,并且配属于第二驱动单元21b的壳体腔室24还被称为第二壳体腔室24b。
38.每个壳体腔室24在壳体背侧6的区域中通过后部的封闭盖25流体密封地进行封闭并且在壳体前侧7的区域中通过驱动器壳体2的前部的封闭盖26流体密封地进行封闭。
39.优选地,驱动器壳体2具有刚性的壳体基体27,在所述壳体基体处直接构造有壳体背面14、壳体前部面15和壳体侧面16,并且在限制这两个壳体腔室24的情况下封闭盖25、26从壳体背侧6和从壳体前侧7置入到所述壳体基体中。封闭盖25、26还能够备选地在外部安放到壳体基体27处。
40.每个驱动单元21、21a、21b具有布置在配属的壳体腔室24、24a、24b中的驱动活塞28。驱动活塞28在密封的情况下能够滑动移位地贴靠在配属的壳体腔室24的壁部处,并且将配属的壳体腔室24、24a、24b划分成面向壳体背面14的后部的驱动腔室32以及面向壳体前部面15的前部的驱动腔室33。每个后部的驱动腔室32在其背侧处通过后部的封闭盖25中的一个进行封闭,而每个前部的驱动腔室33在其前侧处通过前部的封闭盖26中的一个进行封闭。
41.每个驱动单元21优选地具有安置在配属的驱动活塞28处的活塞杆29,所述活塞杆延伸穿过相应配属的前部的驱动腔室33并且(密封地并且能够滑动移位地)穿过联接在其处的前部的封闭盖26,并且所述活塞杆具有与驱动活塞28相对的外部的端部区段34,借助所述端部区段将所述活塞杆固定在轭部23处。以这种方式,这两个驱动单元21始终仅仅能够同步地线性运动。
42.适宜地,轭部23是驱动环节17的滑块体35的组成部分,其在外部借助于沿壳体纵向方向3延伸的线性引导机构36能够线性移位地支承在驱动器壳体2处。线性引导机构36适宜地布置在壳体上侧8处。滑块体35优选地具有带有两个l形支腿的l形的外形,其中一个支腿通过轭部23形成,并且另一个支腿通过板形的滑块体区段37形成,所述滑块体区段在与竖直轴线5成直角的平面中延伸越过壳体上侧8并且与线性引导机构36共同作用。
43.优选地,在滑块体37处构造有至少一个固定接口38,在所述固定接口处能够固定有借助于线性驱动器1进行运动的外部的构件、例如机器部件。
44.在未说明的实施例中,省去滑块体37,并且对于这两个驱动单元21、21a、21b的运动耦合仅仅存在轭部23。在这种情况下,至少一个固定接口38位于轭部23处。
45.在同样未说明的实施例中,线性驱动器1具有仅仅一个唯一的驱动单元21,所述驱动单元的设计方案以从属的边界条件相应于所说明的实施例的第一驱动单元21a的设计方案。只要随后的说明涉及第一驱动单元21a和配属于该第一驱动单元的措施,该实施方案就相应地适用于具有仅仅一个唯一的驱动单元21的线性驱动器。
46.这两个配属于第一驱动单元21a的驱动腔室32、33中的每一个与两个壳体通道42、43中的一个处于流体连接中,所述壳体通道贯穿驱动器壳体2并且尤其构造在壳体基体27中。为了更好地区分,在下文中,与后部的驱动腔室32连接的壳体通道42还被称为后部的壳体通道42,并且与前部的驱动腔室33连接的壳体通道43还被称为前部的壳体通道43。
47.这两个壳体通道42、43中的每一个在驱动器壳体2的壳体侧面16处以各自的侧向的联接开口44、45通出,其中,在下文中,属于后部的壳体通道42的侧向的联接开口44还被称为后部的侧向的联接开口,并且属于前部的壳体通道43的侧向的联接开口45还被称为前部的侧向的联接开口45。
48.优选地,侧向的联接开口44、45位于第一侧面区段16a处。所述侧向的联接开口沿壳体纵向方向3彼此间隔开地进行布置。适宜地,后部的侧向的联接开口44与壳体背侧6相邻,并且前部的联接开口45与壳体前侧7相邻。这两个侧向的联接开口44、45尤其位于共同的开口平面46中,所述开口平面与竖直轴线5成直角地走向并且适宜地与驱动平面22重合。
49.侧向的联接开口44、45能够用于受控地以驱动流体加载相应配属的驱动腔室32、33,从而产生线性的驱动运动18。
50.示范性地,在流体地操控配属于第一驱动单元21、21a的驱动腔室32、33时,同时同步地流体地操控配属于第二驱动单元21、21b的驱动腔室32、33。这通过如下方式来确保,即在驱动器壳体2中并且尤其在其壳体基体27中构造有两个横向通道47,其中一个横向通道将这两个后部的驱动腔室32持续地彼此流体地连接,并且另一个横向通道将这两个前部的驱动腔室33持续地彼此流体地连接。优选地,横向通道47分别穿过封闭盖25、26中的一个与配属的驱动腔室32、33连通。相应的连接通道区段在图3和5中能够在49处看到,其中,该连接通道区段在图3中位于图平面的上方。
51.当线性驱动器1仅仅包含第一驱动单元21a作为唯一的驱动单元21时,省去横向通道47。
52.线性驱动器1具有关于驱动器壳体2并且还关于驱动环节17独立的加装联接部件48作为另外的构件。加装联接部件48能够占据加装到驱动器壳体2处并且固定在驱动器壳体2处的使用位置,所述使用位置在图1、4和5中以及在图3的上部的图部分中示出。备选地,加装联接部件48还能够占据未加装到驱动器壳体2处并且与此相应地与驱动器壳体2分开的准备位置,所述准备位置在图2中说明。只要不另作说明,进一步的说明就涉及加装联接部件48的装配在驱动器壳体2处的使用位置。
53.如能够从图1、4、6和8中特别清楚地看到的那样,加装联接部件48优选地具有l形的外形。所述加装联接部件具有相对于彼此成角度地并且尤其成直角地取向的两个、即第一和第二l形支腿52、53,所述第一和第二l形支腿在下文中还被称为连接支腿52和联接支腿53。
54.在加装联接部件48的使用位置中,联接支腿53沿壳体纵向方向3与壳体背面14相对置,而连接支腿52沿壳体横向方向4与壳体侧面16并且在此尤其与所述壳体侧面的第一
侧面区段16a相对置。连接支腿52沿壳体纵向方向3沿着壳体侧面16的第一侧面区段16a延伸,而联接支腿53沿壳体横向方向4沿着壳体背面14延伸。
55.连接支腿52具有面向驱动器壳体2的内部的支腿面54,所述连接支腿借助所述内部的支腿面在加装联接部件48的使用位置中贴靠在壳体侧面16的第一侧面区段16a处。联接支腿53本身具有内部的支腿面56,所述内部的支腿面面向壳体背面14并且在加装联接部件48的使用位置中适宜地贴靠在壳体背面14处。
56.驱动器壳体2具有位于第一侧面区段16a和壳体背面14之间的后部的角区域58。装配好的加装联接部件48围绕所述后部的角区域58延伸。
57.加装联接部件48由两个彼此分开地构造的第一和第二联接部件通道62、63贯穿。每个联接部件通道62、63将两个布置在连接支腿52的内部的支腿面54处的连接开口64、65中的一个与两个轴向的联接开口66、67中的一个连接,所述轴向的联接开口构造在联接支腿53的背离内部的支腿面56的外部的支腿面57中的一个处。
58.也就是说,构造在驱动器壳体2处的侧向的联接开口44、45沿壳体横向方向4定向,而构造在加装联接部件48处的轴向的联接开口66、67沿壳体纵向方向3定向并且因此轴向地定向。
59.在这两个连接开口64、65中,这两个连接开口64、65的后部的连接开口64如此放置,使得该后部的连接开口在加装联接部件48的使用位置中与后部的侧向的联接开口44对齐,由此,配属的第一联接部件通道62与后部的驱动腔室32处于流体连接中。此外,这两个连接开口64、65的前部的连接开口65如此放置在连接支腿62处,使得该前部的连接开口在加装联接部件48的使用位置中与前部的侧向的联接开口45对齐,由此,第二联接部件通道63与前部的驱动腔室33处于流体连接中。
60.在这两个轴向的联接开口66、67中,第一轴向的联接开口66属于第一联接部件通道62,并且第二轴向的联接开口67属于第二联接部件通道63。
61.在装配在使用位置中的加装联接部件48中,这两个轴向的联接开口66、67能够用于供应和引出对于驱动环节17的操纵来说必要的驱动流体。因为所述轴向的联接开口66、67沿壳体纵向方向3前置于壳体背面14并且此外沿壳体纵向方向3取向,所以必要的联接措施能够方便地沿驱动器壳体2的轴向方向在壳体背侧6的区域中实行。
62.备选地,线性驱动器1还能够在加装联接部件48被取下到准备位置的状态中使用。在这种情况下,对于驱动流体的供应和引出来说必要的联接措施在这两个侧向的联接开口44、45处发生,所述侧向的联接开口沿壳体横向方向4定向。这在图3的下部的图部分中说明。
63.适宜地,每个侧向的联接开口44、45和每个轴向的联接开口66、67配备有固定接口68,所述固定接口构造成,能够直接或间接地联接能够用于供应和/或引出驱动流体的、在附图中仅仅示意性地示出的流体线路72。示范性地,固定接口68实施为内螺纹。相应构造的流体线路72在需要时能够直接旋入到相关的固定接口68中。对于在附图中说明的间接的固定,在期望的固定接口68处能够固定有仅仅点划线地表示的线路联接件73,在所述线路联接件处本身能够可脱开地固定有流体线路72。所述线路联接件73尤其设计成用于流体线路72的可脱开的插接连接。
64.在装配好的加装联接部件48的情况下,适宜地在每个侧向的联接开口44、45的区
域中设置有被夹入在连接支腿52的内部的支腿面54与驱动器壳体2的第一侧面区段16a之间的密封圈74,所述密封圈包围侧向的联接开口44、45和连接开口64、65的彼此对齐的对。代替作为分开的密封圈74,密封圈74还能够作为合适的密封轮廓构造在连接支腿52处。
65.为了固定加装联接部件48的使用位置,线性驱动器1适宜地具有合适的固定器件75。所述固定器件75适宜地构造成用于可脱开地固定加装联接部件48,这适用于所说明的实施例。因此,线性驱动器1的用户任何时候都拥有如下可能性,即将加装联接部件48可选地带到使用位置中或带到准备位置中。当然,存在如下备选的可能性,即固定器件75构造成用于不可脱开地固定加装联接部件48的使用位置,例如借助于作为起固定锁止作用的卡锁连接器件的实现方式。
66.固定器件75适宜地仅仅配属于布置在壳体侧面16处的连接支腿52。这在所说明的实施例中是这种情况。因此,固定措施能够方便地仅仅在第一侧面区段16a的区域中实行,这使操作变得容易。
67.固定器件75示范性地包含两个构造在驱动器壳体2中并且朝着第一侧面区段16a敞开的盲孔状的螺纹孔76,所述螺纹孔沿壳体纵向方向3彼此间隔开并且所述螺纹孔适宜地同样位于开口平面46中。此外,固定器件75包含两个沿壳体横向方向贯穿连接支腿52的通孔77,所述通孔相对于彼此的间距相应于这两个螺纹孔76的彼此间的间距并且所述通孔如此放置,使得当加装联接部件48为了占据使用位置而安放到驱动器壳体2处时,所述通孔分别与螺纹孔76中的一个对齐。最后,固定器件75也还包含两个固定螺纹紧固件78,所述固定螺纹紧固件从连接支腿52的背离内部的支腿面54的外部的支腿面55分别延伸穿过通孔77中的一个并且旋入到配属的螺纹孔76中。在此,每个固定螺纹紧固件78以螺纹紧固件头部支撑在背离驱动器壳体2的外部的支腿面55处并且将连接支腿52沿壳体横向方向4与壳体侧面16的第一侧面区段16a夹紧。螺纹紧固件头部适宜地下沉在连接支腿52中。
68.每个联接部件通道62、63适宜地具有从这两个轴向的联接开口66、67中的一个出发并且构造在联接支腿53中的联接通道区段81。此外,每个联接部件通道62、63具有从侧向的联接开口44、45中的一个出发的连接通道区段82,所述连接通道区段构造在连接支腿52中。此外,每个联接部件通道62、63适宜地具有弓形的或弯曲的过渡通道区段83,所述过渡通道区段将联接通道区段81与连接通道区段82连接。过渡通道区段83配属于驱动器壳体2的后部的角区域58并且在加装联接部件48内围绕该后部的角区域58延伸。
69.过渡通道区段83构造在加装联接部件48的过渡区段84中,所述过渡区段布置在联接支腿53与连接支腿52之间。在过渡区段84中,这两个联接部件通道62、63沿壳体高度方向5彼此间隔开地进行布置。
70.连接支腿52具有与联接支腿53相邻的后部的支腿端部区段85以及关于此间隔开的、朝着壳体前侧7指向的前部的支腿端部区段86。适宜地,后部的连接开口64和适宜地用于固定的通孔77中的一个构造在后部的支腿端部区段85中,而前部的连接开口65并且适宜地还有用于固定的第二通孔77位于前部的支腿端部区段86中。在这两个支腿端部区段85、86之间延伸有支腿接片区段87,该支腿接片区段的沿壳体高度方向5测量的结构高度优选小于这两个支腿端部区段85、86的结构高度。
71.支腿接片区段87尤其如此布置,使得所述支腿接片区段与这两个支腿端部区段85、86共同限制向下朝着壳体下侧9敞开的凹部88。因此,连接支腿52沿壳体横向方向4观察
具有带有向下指向的u形开口的u状的结构,这尤其使材料消耗最小化。
72.第一联接部件通道62在后部的支腿端部区段85中结束。仅第二联接部件通道63贯穿支腿接片区段87并且进一步延伸直到前部的支腿端部区段86中。
73.加装联接部件48的这两个轴向的联接开口66、67在加装联接部件48的使用位置中优选与侧向的联接开口44、45位于相同的开口平面46中。这两个轴向的联接开口66、67尤其沿壳体横向方向4彼此并排地构造在联接支腿53中并且关于壳体高度方向5适宜地位于相同的高度上。
74.尽管加装联接部件48原则上能够由金属制成,但是由于较低的制造成本和较低的重量,推荐由塑料的设计方案。在附图中说明的加装联接部件48的不同的实施方式实现为塑料部件。
75.根据在图1至5中说明的设计方案,加装联接部件48一件式地进行构造。相反,图6至9说明了加装联接部件48的备选的多件式的结构形式。
76.对于多件式的结构形式,共同之处在于,其具有在使用位置中配属于壳体背侧6的后部的联接部件端部体91和关于此独立的、配属于壳体前侧7的前部的联接部件端部体92。
77.后部的联接部件端部体91界定过渡区段84并且具有l形地弯曲的造型,所述造型具有第一支腿臂91a和关于此成直角地取向的第二支腿臂91b。第一支腿臂91a代表联接支腿53,而第二支腿臂91b构造连接支腿52的后部的支腿端部区段85。与此相应地,后部的联接部件端部体91不仅具有两个轴向的联接开口66、67而且具有后部的连接开口64。可选的通孔77中的一个适宜地同样构造在后部的联接部件端部体91中。
78.前部的联接部件端部体92具有前部的连接开口65并且优选设有上面说明的可选的通孔77中的第二个通孔。
79.在图6至9的两个实施例中,在后部的联接部件端部体91与前部的联接部件端部体92之间存在有插接连接。所述插接连接在图6和7的实施例中是直接的插接连接并且在图8和9的实施例中是间接的插接连接。
80.根据图6和7的直接的插接连接由如下方式引起,即加装联接部件48(除了可选的密封机构93之外)两件式地进行构造并且仅仅包括这两个联接部件端部体91、92,所述联接部件端部体沿连接支腿52的纵向轴线94的轴线方向可伸缩地插入到彼此中。第二支腿臂91b具有朝着前部的联接部件端部体92敞开的通道状的凹部95,前部的联接部件端部体92以棒状的突出部96沉入到所述凹部中。对于这两个连接开口64、65来说期望的间距能够非常容易地通过如下方式调整,即这两个联接部件端部体91、92相应程度地插入到彼此中。为了进行密封,棒状的突出部96例如能够设有已经提到的、在插接在一起的状态中到达位于通道状的凹部95内的密封机构93。
81.图6和7的加装联接部件48由于这两个联接部件端部体91、92的可伸缩性还适用于与不同长度尺寸的线性驱动器1结合使用。
82.根据图8和9的加装联接部件48除了可选的密封机构93之外三件式地进行构造。所述加装联接部件除了后部的和前部的联接部件端部体91、92之外还具有布置在其间的附加的管状体97。这两个联接部件端部体91、92在沿连接支腿52的纵向轴线94的轴线方向面向彼此的端侧处分别具有通道状的凹部98,管状体97以其两个彼此相对的端部区段99中的一个插入到所述凹部中。
83.在图8和9的实施方式中,连接开口64、65的彼此间的间距能够非常容易地通过使用具有相应匹配的长度的管状体97来调整。
84.所提到的密封机构93适宜地由o型圈形成并且如此布置在通道状的凹部98中,使得所述密封机构在密封的情况下包围相应插入的端部区段99。
85.在这两种多件式的实施例中,插入到彼此中的构件能够圆形地或非圆形地来设计轮廓。在图6和7的实施例中,存在椭圆形的横截面轮廓。在这里,例如还能够考虑矩形的横截面轮廓。在图8和9的实施例中,插入到彼此中的组成部分设有圆形的横截面轮廓。
86.因为在所说明的这两个实施例中这两个联接部件端部体91、92在加装联接部件48的使用位置中彼此独立地固定在驱动器壳体2处,所以在插入到彼此中的组成部分之间不需要构造固定的连接。尽管如此,插入到彼此中的组成部分也能够彼此固定连接,例如通过将其压入到彼此中或使其彼此粘接。
87.加装联接部件48的制造方式原则上是任意的。尤其在多件式的结构形式中考虑注塑制造。然而,被视为特别有利的是借助于衍生式制造方法的制造,这在所说明的所有实施例中是这种情况。
88.借助于3d打印方法的制造已被证明是特别有利的,尤其是在使用所谓的“clip”技术的情况下的制造,其中,“clip”代表“连续液体界面制造”。在这种方法中,将液态的树脂用作初始材料,其光聚合反应(fotopolymerisation)借助于紫外线和氧气的协调进行控制。同样可有利地使用的3d打印方法是所谓的“dls”技术,其中,“dls”代表“数字光合成(digital light synthesis)”。在这里涉及到“clip”技术的进一步发展,其突出之处尤其在于,化合物在3d打印后仍然能够通过热量进行改变。
89.当然,还能够使用其它的衍生式制造方法,就例如激光烧结方法。
90.在图6至9的多件式的加装联接部件48中,各个构件能够衍生式地制成并且接着插接在一起,其中,紧接着的回火步骤(temperungsschritt)导致插入到彼此中的构件彼此固定地烘烤在一起。这种方式的制造提供如下优点,即能够放弃附加的密封机构93。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
