技术特征:
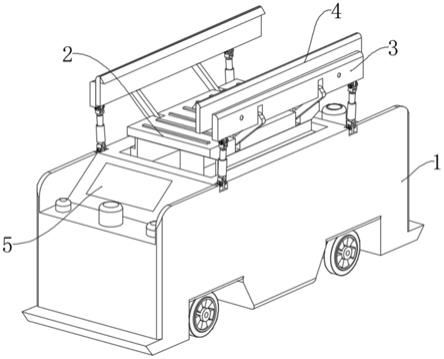
1.一种可行走搬运货物的智能agv机器人,包括agv机器人本体(1),其特征在于,所述agv机器人本体(1)左侧表面设有控制面板(5),所述agv机器人本体(1)顶端通过凹槽安装有受压组件(2),所述受压组件(2)边侧对称设有防护组件(3),所述防护组件(3)由电动伸缩杆(31)、护板(32)和拉杆(33)组成,所述防护组件(3)内侧设有调节组件(4)。2.根据权利要求1所述的一种可行走搬运货物的智能agv机器人,其特征在于,所述受压组件(2)包括内轴(21),所述内轴(21)顶端设有缓冲弹簧(22),且所述缓冲弹簧(22)的通过通孔连接在套轴(23)内壁,所述套轴(23)套接在内轴(21)表面,所述套轴(23)顶端设有承载平台(24),且所述承载平台(24)底端两侧对称设有两个定位板(25)。3.根据权利要求2所述的一种可行走搬运货物的智能agv机器人,其特征在于,所述定位板(25)竖截面呈t形结构,所述定位板(25)外侧与agv机器人本体(1)凹槽内壁相接触。4.根据权利要求2所述的一种可行走搬运货物的智能agv机器人,其特征在于,所述承载平台(24)顶端表面设有条形凸块,且所述条形凸块等距分布在承载平台(24)表面。5.根据权利要求1所述的一种可行走搬运货物的智能agv机器人,其特征在于,所述电动伸缩杆(31)活动设置在agv机器人本体(1)表面,所述电动伸缩杆(31)顶端活动连接有护板(32),且所述护板(32)底端对称设有两个拉杆(33),所述拉杆(33)底端与承载平台(24)边侧活动连接。6.根据权利要求1所述的一种可行走搬运货物的智能agv机器人,其特征在于,所述调节组件(4)包括滚珠(41),所述滚珠(41)通过球槽嵌设在护板(32)内壁,所述滚珠(41)内侧连接有连杆(42),且所述连杆(42)内侧设有回力弹簧(43),所述回力弹簧(43)通过通孔嵌设在内杆(44)内壁,所述内杆(44)内侧设有夹板(45)。7.根据权利要求6所述的一种可行走搬运货物的智能agv机器人,其特征在于,所述夹板(45)内侧设有导向块,且导向块竖截面呈三角形结构。
技术总结
本实用新型涉及智能货运设备技术领域,尤其涉及一种可行走搬运货物的智能AGV机器人,包括AGV机器人本体,所述AGV机器人本体左侧表面设有控制面板,所述AGV机器人本体顶端通过凹槽安装有受压组件,所述受压组件边侧对称设有防护组件,所述防护组件由电动伸缩杆、护板和拉杆组成,所述防护组件内侧设有调节组件。本实用新型通过设置防护组件,实现对货物的扶持,通过货物对承载平台施加压力,承载平台受力通过拉杆拉动护板移动,通过护板对堆叠的货物边侧进行防护挤压,继而避免AGV机器人本体启动后在惯性作用下滑动脱落,影响货物的质量,通过滚珠在护板内壁球槽转动,使夹板角度自主调节,从而匹配不同货物边侧倾斜角度。从而匹配不同货物边侧倾斜角度。从而匹配不同货物边侧倾斜角度。
技术研发人员:许赣勇
受保护的技术使用者:北京中天汇通科技有限公司
技术研发日:2021.09.24
技术公布日:2022/2/22
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。