1.本实用新型的实施例涉及一种检测设备控制系统,特别涉及一种芯片视觉检测设备控制系统。
背景技术:
2.在现有的芯片视觉检测设备中,对于芯片的检测都是分步骤设备进行检测,或者通过人工进行检测,随着芯片检测要求的提高,需要设计一套可以通过主控装置、网络控制装置,以及利用执行控制装置实现芯片通过视觉控制装置,进行芯片检测的芯片视觉检测设备控制系统。
技术实现要素:
3.本实用新型的实施方式的目的在于提供一种可以实现自动检测的芯片视觉检测设备控制系统。
4.为了实现上述目的,本实用新型的实施方式设计了一种芯片视觉检测设备控制系统,其特征在于,包括:
5.主控装置,在所述的芯片视觉检测设备控制系统内设置所述的主控装置;所述的主控装置控制所述的芯片视觉检测设备控制系统进行芯片视觉自动检测;
6.网络控制装置,所述的主控装置与所述的网络控制装置相连接;进行动作控制与数据传输;
7.执行控制装置,所述的主控装置通过所述的网络控制装置连接所述的执行控制装置,进行自动控制芯片的流转;
8.视觉控制装置,所述的主控装置通过所述的网络控制装置和所述的执行控制装置,并利用所述的视觉控制装置对芯片进行视觉检测。
9.进一步,所述的主控装置,还包括:
10.控制器,所述的控制器通过以太网与所述的网络控制装置中的第一集线器相连接;所述的控制器通过ethercat网络与所述的网络控制装置中的节点集线器相连接;
11.pc工控机,所述的pc工控机通过以太网与所述的网络控制装置的第一集线器相连接;
12.触摸屏,所述的触摸屏与以太网与所述的网络控制装置中的第一集线器相连接;
13.所述的控制器、所述的pc工控机与所述的触摸屏通过以太网构成远程网络控制。
14.进一步,所述的网络控制装置,还包括:
15.第二集线器,所述的第二集线器与第一集线器通过以太网相连接;
16.在所述的第二集线器上通过以太网与所述的视觉控制装置相连接。
17.进一步,所述的视觉控制装置,还包括:
18.第一视觉装置,所述的第一视觉装置与第二集线器中的一个端口通过以太网相连接;
19.第二视觉装置,所述的第二视觉装置与第二集线器中的一个端口通过以太网相连接;
20.第三视觉装置,所述的第三视觉装置与第二集线器中的一个端口通过以太网相连接。
21.进一步,所述的执行控制装置,还包括:
22.第一分站控制器,所述的第一分站控制器与节点集线器通过ethercat相连接;
23.第一脉冲模块,所述的第一分站控制器与所述的第一脉冲模块进行电性连接;
24.第一输入模块,所述的第一分站控制器与若干个所述的第一输入模块电性连接;
25.第一输出模块,所述的第一分站控制器与若干个所述的第一输出模块电性连接;
26.第一伺服模块,第n个所述的第一伺服模块与所述的第一分站控制器通过 ethercat相连接;
27.第n 1个所述的第一伺服模块与第n 2个所述的第一伺服模块之间相互串联;
28.第二分站控制器,所述的第二分站控制器与节点集线器通过ethercat相连接;
29.第二脉冲模块,所述的第二分站控制器与所述的第二脉冲模块进行电性连接;
30.第二输入模块,所述的第二分站控制器与若干个所述的第二输入模块电性连接;
31.第二输出模块,所述的第二分站控制器与若干个所述的第二输出模块电性连接;
32.第二伺服模块,第n个所述的第二伺服模块与所述的第二分站控制器通过 ethercat相连接;
33.第n 1个所述的第二伺服模块与第n 2个所述的第二伺服模块之间相互串联;
34.第三分站控制器,所述的第三分站控制器与节点集线器通过ethercat相连接;
35.第三脉冲模块,所述的第三分站控制器与所述的第三脉冲模块进行电性连接;
36.第三输入模块,所述的第三分站控制器与若干个所述的第三输入模块电性连接;
37.第三输出模块,所述的第三分站控制器与若干个所述的第三输出模块电性连接;
38.第三伺服模块,第n个所述的第三伺服模块与所述的第三分站控制器通过 ethercat相连接;
39.第n 1个所述的第三伺服模块与第n 2个所述的第三伺服模块之间相互串联;
40.步进模块,在所述的第三伺服模块的末端串联所述的步进模块;
41.第四分站控制器,所述的第四分站控制器与节点集线器通过ethercat相连接;
42.第四脉冲模块,所述的第四分站控制器与所述的第四脉冲模块进行电性连接;
43.第四输入模块,所述的第四分站控制器与若干个所述的第四输入模块电性连接;
44.第四输出模块,所述的第四分站控制器与若干个所述的第四输出模块电性连接;
45.第四伺服模块,第n个所述的第四伺服模块与所述的第四分站控制器通过 ethercat相连接;
46.第n 1个所述的第四伺服模块与第n 2个所述的第四伺服模块之间相互串联;
47.所述的n为大于等于1的自然数。
48.进一步,在所述的第一伺服模块、所述的第二伺服模块、所述的第三伺服模块、所述的第四伺服模块的电源输入端接入电源;在所述的第一伺服模块、所述的第二伺服模块、所述的第三伺服模块、所述的第四伺服模块的输入控制cn1 口上分别接入正限位开关、负限位开关、原点接近开关以及急停开关;在所述的第一伺服模块、所述的第二伺服模块、所
述的第三伺服模块、所述的第四伺服模块的电源输出端连接伺服电机;在所述的第一伺服模块、所述的第二伺服模块、所述的第三伺服模块、所述的第四伺服模块的cn2口上连接至所述的伺服电机的编码器。
49.进一步,在所述的第一脉冲模块、所述的第二脉冲模块、所述的第三脉冲模块和所述的第四脉冲模块上的a1端和a2端分别连接至步进模块的pul 端和 pul-端;在所述的第一脉冲模块、所述的第二脉冲模块、所述的第三脉冲模块和所述的第四脉冲模块上的b1端和b2端分别连接至步进模块的dir 端和dir-端;在所述的pul 端和所述的dir 端上串联2k欧姆的电阻;在所述的第一脉冲模块、所述的第二脉冲模块、所述的第三脉冲模块和所述的第四脉冲模块上的a 端、 a-端、b 端、b-端分别连接至步进电机上的a 端、a-端、b 端、b-端。
50.进一步,所述的第一分站控制器、所述的第二分站控制器、所述的第三分站控制器、所述的第四分站控制器为plc分站控制模块。
51.进一步,所述的第一伺服模块、所述的第二伺服模块、所述的第三伺服模块、所述的第四伺服模块为sv-x3eb040a-a2型号的伺服控制器。
52.进一步,所述的第一输入模块、所述的第二输入模块、所述的第三输入模块、所述的第四输入模块为nx-id534型号的输入模块;
53.所述的第一输出模块、所述的第二输出模块、所述的第三输出模块、所述的第四输出模块为nx-od5121模块。
54.本实用新型的实施方式同现有技术相比,通过设计芯片视觉检测设备控制系统,实现了通过主控装置、网络控制装置,以及利用执行控制装置实现芯片通过视觉控制装置,进行芯片检测的芯片视觉检测设备控制系统;解决了现有设备中还未实现芯片自动检测的技术问题。
附图说明
55.图1为本实用新型的结构示意图;
56.图2为本实用新型的步进电机的连接示意图;
57.图3为本实用新型的伺服电机的连接示意图。
具体实施方式
58.为使本实用新型的目的、技术方案和优点更加清楚,下面将结合附图对本实用新型的各实施方式进行详细的阐述。然而,本领域的普通技术人员可以理解,在本实用新型各实施方式中,为了使读者更好地理解本技术而提出了许多技术细节。但是,即使没有这些技术细节和基于以下各实施方式的种种变化和修改,也可以实现本技术各权利要求所要求保护的技术方案。
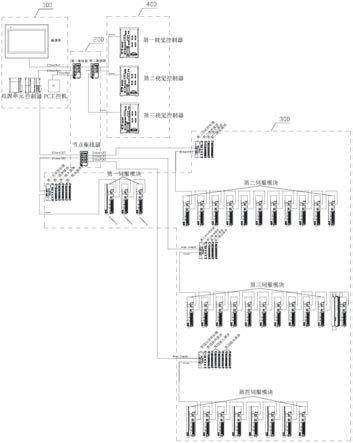
59.本实用新型的第一实施方式涉及一种芯片视觉检测设备控制系统,如图1 所示,包括:
60.在芯片视觉检测设备控制系统内设置主控装置100;主控装置100控制芯片视觉检测设备控制系统进行芯片视觉自动检测;主控装置100作为芯片视觉检测设备控制系统中的控制装置。
61.主控装置100与网络控制装置200相连接;进行动作控制与数据传输;网络控制装置200用于本实施例中的网络通讯控制。
62.主控装置100通过网络控制装置200连接执行控制装置30,进行自动控制芯片的流转;执行控制装置300作为本实施例中的执行机构,
63.主控装置100通过网络控制装置200和执行控制装置300,并利用视觉控制装置400对芯片进行视觉检测。视觉控制装置400主要起到对芯片进行视觉检测的作用。
64.为了实现上述的技术效果,如图1所示,主控装置100,还包括:
65.控制器,所述的控制器通过以太网ethernet与网络控制装置200中的第一集线器相连接;控制器通过ethercat网络与网络控制装置200中的节点集线器相连接;
66.pc工控机,所述的pc工控机通过以太网ethernet与网络控制装置00的第一集线器相连接;
67.触摸屏,触摸屏与以太网ethernet与网络控制装置200中的第一集线器相连接;
68.控制器、pc工控机与触摸屏通过以太网ethernet构成远程网络控制。
69.为了实现上述的技术效果,如图1所示,所述的网络控制装置,还包括:
70.第二集线器,所述的第二集线器与第一集线器通过以太网相连接;
71.在所述的第二集线器上通过以太网与所述的视觉控制装置相连接。
72.为了实现上述的技术效果,如图1所示,视觉控制装置200,还包括:
73.第一视觉装置,所述的第一视觉装置与第二集线器中的一个端口通过以太网 ethernet相连接;
74.第二视觉装置,所述的第二视觉装置与第二集线器中的一个端口通过以太网相连接;
75.第三视觉装置,所述的第三视觉装置与第二集线器中的一个端口通过以太网 ethernet相连接。第一视觉装置,第二视觉装置、第三视觉装置可以实现3个视觉检测工位对于芯片的视觉检测。
76.为了实现上述的技术效果,如图1所示,执行控制装置300,还包括:
77.第一分站控制器,所述的第一分站控制器与节点集线器通过ethercat相连接;
78.第一脉冲模块,所述的第一分站控制器与所述的第一脉冲模块进行电性连接;
79.第一输入模块,所述的第一分站控制器与若干个所述的第一输入模块电性连接;
80.第一输出模块,所述的第一分站控制器与若干个所述的第一输出模块电性连接;
81.第一伺服模块,第n个所述的第一伺服模块与所述的第一分站控制器通过 ethercat相连接;
82.第n 1个所述的第一伺服模块与第n 2个所述的第一伺服模块之间相互串联;
83.在本实施例中第1个所述的第一伺服模块与所述的第一分站控制器通过 ethercat相连接;第2个所述的第一伺服模块与第3个所述的第一伺服模块之间相互串联;以此类推,多个的第一伺服模块之间串联,实现第一分站控制器对于多个第一伺服模块的控制。
84.第二分站控制器,所述的第二分站控制器与节点集线器通过ethercat相连接;
85.第二脉冲模块,所述的第二分站控制器与所述的第二脉冲模块进行电性连接;
86.第二输入模块,所述的第二分站控制器与若干个所述的第二输入模块电性连接;
87.第二输出模块,所述的第二分站控制器与若干个所述的第二输出模块电性连接;
88.第二伺服模块,第n个所述的第二伺服模块与所述的第二分站控制器通过 ethercat相连接;
89.第n 1个所述的第二伺服模块与第n 2个所述的第二伺服模块之间相互串联;
90.在本实施例中,第2个所述的第二伺服模块与所述的第二分站控制器通过ethercat相连接;第2个所述的第二伺服模块与第3个所述的第二伺服模块之间相互串联;以此类推,多个的第二伺服模块之间串联,实现第二分站控制器对于多个第二伺服模块的控制。
91.第三分站控制器,所述的第三分站控制器与节点集线器通过ethercat相连接;
92.第三脉冲模块,所述的第三分站控制器与所述的第三脉冲模块进行电性连接;
93.第三输入模块,所述的第三分站控制器与若干个所述的第三输入模块电性连接;
94.第三输出模块,所述的第三分站控制器与若干个所述的第三输出模块电性连接;
95.第三伺服模块,第n个所述的第三伺服模块与所述的第三分站控制器通过 ethercat相连接;
96.第n 1个所述的第三伺服模块与第n 2个所述的第三伺服模块之间相互串联;
97.在本实施例中,第1个所述的第三伺服模块与所述的第三分站控制器通过 ethercat相连接;第2个所述的第三伺服模块与第3个所述的第三伺服模块之间相互串联;以此类推,多个的第三伺服模块之间串联,实现第三分站控制器对于多个第三伺服模块的控制。
98.步进模块,在所述的第三伺服模块的末端串联所述的步进模块;
99.第四分站控制器,所述的第四分站控制器与节点集线器通过ethercat相连接;
100.第四脉冲模块,所述的第四分站控制器与所述的第四脉冲模块进行电性连接;
101.第四输入模块,所述的第四分站控制器与若干个所述的第四输入模块电性连接;
102.第四输出模块,所述的第四分站控制器与若干个所述的第四输出模块电性连接;
103.第四伺服模块,第n个所述的第四伺服模块与所述的第四分站控制器通过ethercat相连接;
104.第n 1个所述的第四伺服模块与第n 2个所述的第四伺服模块之间相互串联;
105.同理,在本实施例中,第1个所述的第四伺服模块与所述的第四分站控制器通过ethercat相连接;
106.第2个所述的第四伺服模块与第3个所述的第四伺服模块之间相互串联;以此类推,多个的第四伺服模块之间串联,实现第四分站控制器对于多个第四伺服模块的控制。
107.在本实施例中的n为大于等于1的自然数。连接成立,从理论上讲,可以实现n个伺服模块与多个伺服模块的连接,均能成立。
108.为了实现上述的技术效果,如图2所示,由于所述的第一伺服模块、所述的第二伺服模块、所述的第三伺服模块、所述的第四伺服模块的结构和连接关系均相同,在本实施例中在所述的第一伺服模块、所述的第二伺服模块、所述的第三伺服模块、所述的第四伺服模块的电源输入端接入电源;在所述的第一伺服模块、所述的第二伺服模块、所述的第三伺服模块、所述的第四伺服模块的输入控制 cn1口上分别接入正限位开关、负限位开关、原点接近开关以及急停开关;在所述的第一伺服模块、所述的第二伺服模块、所述的第三伺服模
块、所述的第四伺服模块的电源输出端连接伺服电机;在所述的第一伺服模块、所述的第二伺服模块、所述的第三伺服模块、所述的第四伺服模块的cn2口上连接至所述的伺服电机的编码器。
109.上述的电路连接结构,形成了所述的第一伺服模块、所述的第二伺服模块、所述的第三伺服模块、所述的第四伺服模块对于伺服电机的连接和控制。
110.为了实现上述的技术效果,如图2所示,为了实现对于步进电机的控制,在所述的第一脉冲模块、所述的第二脉冲模块、所述的第三脉冲模块和所述的第四脉冲模块上的a1端和a2端分别连接至步进模块的pul 端和pul-端;在所述的第一脉冲模块、所述的第二脉冲模块、所述的第三脉冲模块和所述的第四脉冲模块上的b1端和b2端分别连接至步进模块的dir 端和dir-端;在所述的pul 端和所述的dir 端上串联2k欧姆的电阻;在所述的第一脉冲模块、所述的第二脉冲模块、所述的第三脉冲模块和所述的第四脉冲模块上的a 端、a-端、b 端、 b-端分别连接至步进电机上的a 端、a-端、b 端、b-端。
111.上述的所述的第一脉冲模块、所述的第二脉冲模块、所述的第三脉冲模块和所述的第四脉冲模块实现了对于相对应的步进电机的控制,实现了所述的第一脉冲模块、所述的第二脉冲模块、所述的第三脉冲模块和所述的第四脉冲模块与相对应的步进电机的电路连接。
112.为了实现上述的技术效果结合图1、图2、图3所示,所述的第一分站控制器、所述的第二分站控制器、所述的第三分站控制器、所述的第四分站控制器为 plc分站控制模块。
113.所述的第一伺服模块、所述的第二伺服模块、所述的第三伺服模块、所述的第四伺服模块为sv-x3eb040a-a2型号的伺服控制器,所述的第一输入模块、所述的第二输入模块、所述的第三输入模块、所述的第四输入模块为nx-id534型号的输入模块;所述的第一输出模块、所述的第二输出模块、所述的第三输出模块、所述的第四输出模块为nx-od5121模块。
114.本领域的普通技术人员可以理解,上述各实施方式是实现本实用新型的具体实施例,而在实际应用中,可以在形式上和细节上对其作各种改变,而不偏离本实用新型的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。