1.本发明涉及辅助驾驶系统检测技术领域,具体涉及一种集成辅助驾驶系统控制器的检测方法及系统。
背景技术:
2.在汽车行业快速向智能化发展的趋势下,集成辅助驾驶系统已经成为了其中的重要组成部分。集成辅助驾驶系统控制器集成了avm(around view monitor)环景影像功能、bsd(blind spot detection)盲区预警功能和dms(driver monitoring system)疲劳驾驶预警功能,利用3d拼接技术以及视觉识别技术,为驾驶员提供安全辅助驾驶预警服务。作为该款产品的供应商,面对日益增长的客户需求,设计一款适合大批量检测的装置用于提升生产效率和检测稳定性,是很有必要的。
技术实现要素:
3.本发明提供了一种集成辅助驾驶系统控制器的检测方法及系统,解决了以上所述的集成辅助驾驶系统控制器的检测效率低的技术问题。
4.本发明为解决上述技术问题提供了一种集成辅助驾驶系统控制器的检测方法,包括以下步骤:
5.s1,将待测产品功能进行分解并作为检测项;
6.s2,将待测产品的控制器与车机连接,检测pcba按照车机下发的报文中的检测项分别单独对应改变测试环境,车机接收控制器反馈信息,并将反馈信息与对应的检测项的理想值进行对比分析得到检测结果。
7.优选地,所述待测产品为集成辅助驾驶系统控制器,所述集成辅助驾驶系统控制器的检测项包括疲劳驾驶预警摄像头视频输入、环景影像前、左、右侧摄像头输入、lvds视频输出、can通信、左预警灯电源输出、右预警灯电源输出、雷达电源输出、acc档信号、cvbs模拟信号、sd卡及控制器软件版本信息。
8.优选地,所述s2具体包括:
9.切换至摄像头检测环境,车机接收控制器信号后显示各摄像头拍摄的高清画面是否正常,检测pcba再据此判断产品的劳驾驶预警摄像头视频输入、环景影像前、左、右侧摄像头输入以及lvds视频输出是否正常;
10.切换至通信检测环境,检查控制器与检测pcba之间的通信是否正常,以判断产品的can通信是否正常;
11.切换至开关输入检测环境,车机接收控制器指令并控制电源输出,检测pcba据此检测产品的左预警灯电源输出、右预警灯电源输出以及雷达电源输出是否正常;
12.切换至acc档位检测环境,车机与控制器通讯后直接读取档位状态,检测pcba根据档位状态判断产品的acc档信号是否正常;
13.切换至cvbs模拟检测环境,车机在触控后显示模拟的普清画面,检测pcba据此判
断产品的cvbs模拟信号是否正常;
14.切换至sd卡检测环境,车机与控制器通讯后直接读取状态,以检测sd卡是否正常;
15.切换至控制器软件版本信息检测环境,车机与控制器通讯后直接读取状态,以检测版本信息。
16.优选地,所述测试环境包括自动检测逻辑模式及人工触控检测逻辑模式;
17.所述自动检测逻辑模式包括can通信、左预警灯电源输出、右预警灯电源输出、雷达电源输出、acc档信号、cvbs模拟信号、sd卡及控制器软件版本信息;
18.所述人工触控检测逻辑模式包括疲劳驾驶预警摄像头视频输入、环景影像前、左、右侧摄像头输入及lvds视频输出。
19.优选地,所述s2具体包括:
20.在自动检测逻辑模式的测试环境下,由继电器实现各检测项之间的自动切换,通过车机自动发送所有检测动作的指令,检测pcba完成相关动作即改变当前的测试环境,控制器再将响应动作完成后的状态实时反馈给车机,车机对反馈的状态与理想值进行比对分析,最终将检测结果呈现在屏幕上。
21.优选地,所述s2具体包括:
22.在人工触控检测逻辑模式的测试环境下,检测人员分别点击屏幕上的每一路视频输出按钮,此时车机收到视频输出的请求信号,随即下发相应的动作指令,控制器完成视频输出后将信号再反馈给车机,由车机将视频画面反馈在屏幕上。
23.本发明还提供了一种用于实施集成辅助驾驶系统控制器的检测方法的系统,包括:
24.车机,用于根据检测项对应下发报文给检测pcba,并接收待测产品的控制器的反馈信息,并将反馈信息与对应的检测项的理想值进行对比分析得到检测结果;
25.检测pcba,用于根据报文中的检测项分别单独对应改变测试环境;
26.摄像头及光照,用于模拟实车的测试环境;
27.供电系统,用于独立供电。
28.优选地,所述车机为android车机,包含主机及12.8寸可触控显示屏。
29.优选地,所述检测pcba采用s32k系列mcu芯片,所述检测pcba具备电源管理模块、3路can总线、8组ad模块同时配备对应的可调电阻以及13组继电器。
30.有益效果:本发明提供了一种集成辅助驾驶系统控制器的检测方法及系统,其中方法包括s1,将待测产品功能进行分解并作为检测项;s2,将待测产品的控制器与车机连接,检测pcba按照车机下发的报文中的检测项分别单独对应改变测试环境,车机接收控制器反馈信息,并将反馈信息与对应的检测项的理想值进行对比分析得到检测结果。该检测方案已经投入到实际生产中,用于集成辅助驾驶系统控制器的大批量检测。该检测装置不仅能保证运行过程平稳、高效,而且还能保证检测结果的一致性,目前已经产生了良好的经济效益,达到了预期目标,同时软件部分还预留了大量扩展空间,可以用于应对产品生命周期内迭代新功能的检测。
31.上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,并可依照说明书的内容予以实施,以下以本发明的较佳实施例并配合附图详细说明如后。本发明的具体实施方式由以下实施例及其附图详细给出。
附图说明
32.此处所说明的附图用来提供对本发明的进一步理解,构成本技术的一部分,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
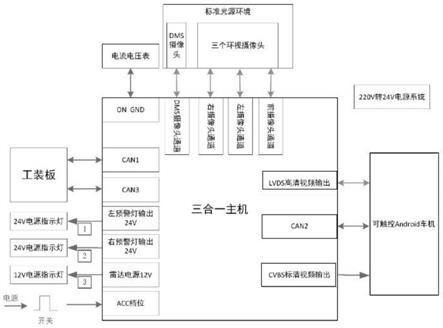
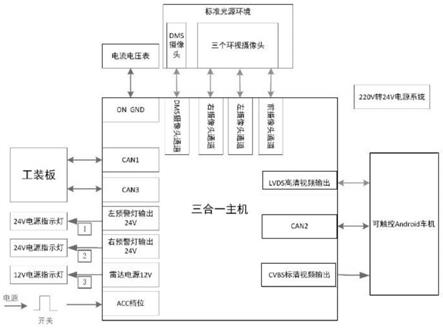
33.图1为本发明集成辅助驾驶系统控制器的检测方法的原理图;
34.图2为本发明集成辅助驾驶系统控制器的检测方法的自动检测逻辑图;
35.图3为本发明集成辅助驾驶系统控制器的检测方法
36.图4为本发明集成辅助驾驶系统控制器的检测装置的检测图。
具体实施方式
37.以下结合附图对本发明的原理和特征进行描述,所举实例只用于解释本发明,并非用于限定本发明的范围。在下列段落中参照附图以举例方式更具体地描述本发明。根据下面说明和权利要求书,本发明的优点和特征将更清楚。需说明的是,附图均采用非常简化的形式且均使用非精准的比例,仅用以方便、明晰地辅助说明本发明实施例的目的。
38.需要说明的是,当组件被称为“固定于”另一个组件,它可以直接在另一个组件上或者也可以存在居中的组件。当一个组件被认为是“连接”另一个组件,它可以是直接连接到另一个组件或者可能同时存在居中组件。当一个组件被认为是“设置于”另一个组件,它可以是直接设置在另一个组件上或者可能同时存在居中组件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
39.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
40.如图1至图4所示,本发明提供了一种集成辅助驾驶系统控制器的检测方法,包括s1,将待测产品功能进行分解并作为检测项;s2,将待测产品的控制器1与车机连接,检测pcba按照车机下发的报文中的检测项分别单独对应改变测试环境,车机接收控制器1反馈信息,并将反馈信息与对应的检测项的理想值进行对比分析得到检测结果。该检测方案已经投入到实际生产中,用于集成辅助驾驶系统控制器1的大批量检测。该检测装置2不仅能保证运行过程平稳、高效,而且还能保证检测结果的一致性,目前已经产生了良好的经济效益,达到了预期目标,同时软件部分还预留了大量扩展空间,可以用于应对产品生命周期内迭代新功能的检测。
41.通过对产品(即控制器1)硬件进行分析后,可将产品功能进行分解并作为检测项用于检测方案的设计。分解后的功能项如下表1所示:
42.表1分解后的功能项
[0043][0044][0045]
检测原理如下:整个检测装置2主要通过模拟实车环境,将待测产品即集成辅助驾驶系统控制器1最后置于整个环境中,通过改变当前使用环境,控制器1做出相应动作后的状态,检测装置2检测到相应的反馈信息,最后将反馈信息与对应的检测项的理想值进行对比分析得到检测结果。
[0046]
搭建对应的实车环境至少需要下述配置:1套支持lvds和cvbs视频信号的可触控android车机、1个检测pcba、4个高清摄像头(即1个疲劳驾驶预警摄像头、1个环景影像前侧摄像头、1个环景影像左侧摄像头和1个环景影像右侧摄像头)、1套24v供电系统、适合的光照环境和若干开关。疲劳驾驶预警摄像头视频输入的检测主要是通过疲劳驾驶预警摄像头拍摄驾驶员打哈欠的照片后,判断输出画面是否正常。环景影像前、左、右侧摄像头输入的检测主要是通过环景影像前、左、右侧摄像头拍摄24色标准色板后,判断输出画面是否正常。
[0047]
结合表2对具体的检测方法说明如下:
[0048]
(1)制作一款适用于android车机的app,用于下发改变当前使用环境的报文给检测pcba,并接收集成辅助驾驶系统控制器1反馈的状态,最后与理想值进行对比,得出最终检测结果并显示;
[0049]
(2)检测pcba按照车机下发的报文,改变当前使用环境,并最后将左预警灯电源、右预警灯电源和雷达电源的ad电压值反馈给车机;
[0050]
(3)通过车机与集成辅助驾驶系统控制器1之间的触摸操控来实现can2(通讯can:250k)的检测,正常通讯后,控制器1会持续将自身状态反馈给车机;
[0051]
(4)app界面有选择/切换lvds视频输出画面的功能按钮,车机在人为触控后分别能够显示4个摄像头拍摄的高清画面,实现摄像头通道的检测;
[0052]
(5)app界面有选择cvbs视频输出画面的功能,车机在人为触控后分别能够显示4个摄像头拍摄的普清画面,实现cvbs模拟信号的检测。
[0053]
表2检测方式说明
[0054][0055]
优选的方案,按照集成辅助驾驶系统控制器1的检测方案,可将功能项分为两大类,每一类按照各自的检测逻辑并行,如表3所示,所有功能项均检测合格方可视为该控制器1的功能合格。
[0056]
表3检测逻辑分类
[0057][0058][0059]
在自动检测逻辑下,自动检测逻辑模式包括can通信、左预警灯电源输出、右预警灯电源输出、雷达电源输出、acc档信号、cvbs模拟信号、sd卡及控制器1软件版本信息。可以由继电器实现各功能项检测之间的自动切换,该逻辑主要是由车机自动发送所有检测动作的指令,检测pcba完成相关动作,即改变当前的使用环境,控制器1再将响应动作完成后的状态实时反馈给车机,车机对反馈的状态与理想值进行比对分析,最终将检测结果呈现在屏幕上,整体逻辑如图2所示。
[0060]
在人工触控检测逻辑模式下,使用人工触控检测逻辑的功能项主要是4路高清视频输入和1路普清模拟视频输出组成,需要由检测人员主观判断控制器1的输出画面是否正常,该逻辑主要是由检测人员分别点击屏幕上的每一路视频输出按钮,此时车机收到视频输出的请求信号,随即下发相应的动作指令,控制器1完成视频输出后将信号再反馈给车机,由车机将视频画面反馈在屏幕上,最终由检测人员确定对应的结果并在屏幕上点击ok/
ng,整体逻辑如图3所示。
[0061]
具体地,检测装置2的检测pcba与控制器1之间采用can通信接口,can2.0b,扩展帧,波特率默认为250kbps,并可根据实际情况进行自动适配。检测装置2与控制器1进行各种数据交互的信息类型,控制命令按照业务类型进行分类,便于协议修订和管理。指检测装置2与控制器1进行交互的数据中,由具体业务功能定制的内容,该字段内容长度必须在7个字节以内。
[0062]
其中,在整个检测的通信过程中需要进行建链,分成下述4个步骤示:
[0063]
(1)检测装置2发送“起始帧格式1”;
[0064]
(2)检测装置2发送“起始帧格式2”,表示接下来开始传输数据帧;
[0065]
(3)检测装置2发送“数据帧”;
[0066]
(4)控制器1收到“数据帧”,表示此时链路拆除,下次传输需要重新建链。
[0067]
注:控制器1在没有收到“起始帧”之前,收到任何“数据帧”,则丢弃;“起始帧”发送成功后,检测装置2则发送“数据帧”,即发送每一个“数据帧”之前都需要先发送“起始帧”,“起始帧”发送成功后500ms内必须完成“数据帧”传输,如果超过500ms时间,控制器1将自动拆除链路,退出通信过程,检测装置2需重新建链才能完成数据传输。控制器1需要应答时,则直接应答“数据帧”,不需要发送“起始帧”。
[0068]
本发明实施例还提供了一种用于实施集成辅助驾驶系统控制器1的检测方法的系统,包括:
[0069]
车机,用于根据检测项对应下发报文给检测pcba,并接收待测产品的控制器1的反馈信息,并将反馈信息与对应的检测项的理想值进行对比分析得到检测结果;
[0070]
检测pcba,用于根据报文中的检测项分别单独对应改变测试环境;
[0071]
摄像头及光照,用于模拟实车的测试环境;
[0072]
供电系统,用于独立供电。
[0073]
其中,用于实施集成辅助驾驶系统控制器的检测方法如前所述,在此不再赘述。
[0074]
以上所述,仅为本发明的较佳实施例而已,并非对本发明作任何形式上的限制;凡本行业的普通技术人员均可按说明书附图所示和以上所述而顺畅地实施本发明;但是,凡熟悉本专业的技术人员在不脱离本发明技术方案范围内,利用以上所揭示的技术内容而做出的些许更动、修饰与演变的等同变化,均为本发明的等效实施例;同时,凡依据本发明的实质技术对以上实施例所作的任何等同变化的更动、修饰与演变等,均仍属于本发明的技术方案的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。