1.本实用新型涉及建筑工程技术领域,具体涉及一种智能建造无线遥控吊塔视角跟随转换装置。
背景技术:
2.随着科技的发展,建筑业的施工建造方式也发生了巨大的变化,智能建造等新型工业化建造方式,正在发展,在智能建造工程领域,将出现更多自动化程度高、对人员依赖少的施工装备,塔吊作为施工现场最为常见的装备,也将会出现越来越多的无人驾驶采用遥控的方式进行作业的新功能设备,例如无线无人操作塔吊,人员站在地面上即可对塔吊进行操作。但是由于施工现场的建筑物较高,有些建筑高达几百米,当人站在地面遥控塔吊时,因此人在进行遥控操作的时候,对几百米外吊件的观察成为问题,容易引发工程事故,需要有相关技术对该工程问题进行解决。
技术实现要素:
3.有鉴于此,本实用新型的目的在于提供了一种智能建造无线遥控吊塔视角跟随转换装置,在地面上就可以观察吊件状况,以满足工程安全建设需要。
4.为进一步实现上述目的,本实用新型采用了以下技术方案:一种智能建造无线遥控吊塔视角跟随转换装置,包括作为主体的吊钩部分和安装于所述吊钩部分上的平台部分,其中:所述吊钩部分包括吊钩、以及由下至上固定在所述吊钩上的固定轴承与圆环形固定齿条;所述平台部分包括作为整体支撑的旋转平台、以及固定于所述旋转平台上的旋转电机、plc控制器、继电器组、拉线传感器、雷达侦测器、雷达控制器、网络摄像头;
5.所述plc控制器通过导线分别与所述继电器组、拉线传感器、雷达控制器、网络摄像头连接;所述继电器组通过导线与所述旋转电机连接;所述雷达控制器通过导线与所述雷达侦测器连接。
6.可选的,所述旋转平台通过中部圆形开口与所述固定轴承固定连接,所述旋转电机与旋转齿轮嵌合,所述旋转齿轮与圆环形固定齿条啮合连接。
7.与现有技术相比,本实用新型的优势在于:
8.1.可直接固定安装在现有塔吊上,安装简单。
9.2.采用的物联网方式能让施工人员在驾驶室迅速了解高空吊件情况,安全性好。
10.3.造价低,采用的元件简单,制造工艺和成本简单可控。
附图说明
11.此处所说明的附图用来提供对本申请的进一步理解,构成本申请的一部分,本申请的示意性实施例及其说明用于解释本申请,并不构成对本申请的不当限定。在附图中:
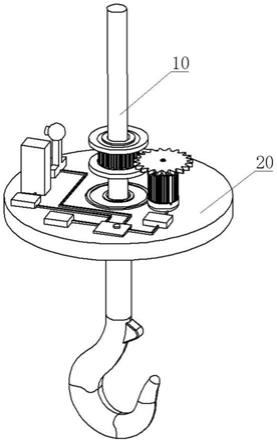
12.图1为本实用新型的整体示意图;
13.图2为本实用新型的吊钩部分示意图;
14.图3为本实用新型的平台部分示意图;
15.图4为本实用新型的遥控逻辑示意图。
16.附图中:
17.10-吊钩部分:
18.11-吊钩;12-固定轴承;13-圆环形固定齿条;
19.20-平台部分:
20.21-旋转平台;22-旋转电机;23-旋转齿轮;24-plc控制器;25-导线;26-继电器组;27-拉线传感器;28a-雷达侦测器;28b-雷达控制器;29-网络摄像头。
具体实施方式
21.为了便于本领域普通技术人员理解和实施本实用新型,下面结合实施例对本实用新型作进一步的详细描述,应当理解,此处所描述的实施示例仅用于说明和解释本实用新型,并不用于限定本实用新型。
22.本实施例提供的无线遥控吊塔视角跟随转换装置,如图1-4所示,包括作为主体的吊钩部分10和安装在其上的平台部分20,其中:
23.由图1、图2所示,所述吊钩部分10包括作为主体的吊钩11,以及由下至上固定在其上的固定轴承12与圆环形固定齿条13;所述平台部分20包括作为整体支撑的旋转平台21,以及固定于其上的旋转电机22、plc控制器24、继电器组26、拉线传感器27、雷达侦测器28a、雷达控制器28b、网络摄像头29;所述旋转平台21通过中部圆形开口与固定轴承12固定连接;所述旋转电机22与旋转齿轮23嵌合;所述旋转齿轮23与圆环形固定齿条13啮合连接。
24.由图2、图3所示,所述plc控制器24通过导线25分别与继电器组26、拉线传感器27、雷达控制器28b、网络摄像头29连接;所述继电器组26通过导线25与旋转电机22连接;所述雷达控制器28b通过导线25与雷达侦测器28a连接。
25.本实用新型中,所述旋转电机22、导线25、继电器组26、网络摄像头29均为通用件;所述plc控制器24的型号为mpc-12n12r;所述拉线传感器27的型号为milont的wps;所述雷达侦测器28a的型号为hlk-ld112-24g;所述雷达控制器28b的型号为hlk-ld015-5g。
26.下面结合上述结构描述,参照图1-4对本实用新型无线遥控吊塔视角跟随转换装置的工作原理进行简单地描述。
27.s1、位移监测模式,施工人员通过安装在驾驶室内的触摸屏远程控制plc控制器24对拉线传感器27进行通电,拉线传感器27检测的拉线头端与吊钩11连接,传感器固定于吊臂上不动,当吊钩11移动时,拉动拉线移动,传感器检测到拉线的位移及速度,拉线传感器27将收集到的数据返还给plc控制器24,plc控制器24再将数据返还到触摸屏中供施工人员监测。
28.s2、雷达报警模式,施工人员通过安装在驾驶室内的触摸屏远程控制plc控制器24对继电器组26、雷达控制器28b、雷达侦测器28a进行通电,雷达侦测器28a将环境数据返还给雷达控制器28b,当出现吊件离建筑物过近等问题时,雷达控制器28b将警报信号传输给plc控制器24,plc控制器24再将警报信号返还到触摸屏中,然后触摸屏通过发出警告来提醒施工人员;施工人员可通过提前设置程序让plc控制器24通过控制继电器组26来让旋转电机按一定功率运行,进而使平台部分20进行自转。
29.s3、视频监测模式,施工人员通过安装在驾驶室内的触摸屏远程控制plc控制器24对继电器组26、网络摄像头29进行通电,网络摄像头29连接网络后,施工人员可通过阿里云服务器对网络摄像头29视频内容进行接入监测,同时施工人员还可通过触摸屏对plc控制器24下达指令,进而控制平台20自转实现视角的转换。
30.以上所述是本实用新型的优选实施方式而已,当然不能以此来限定本实用新型之权利范围,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以做出若干改进和变动,这些改进和变动也是视为本实用新型的保护范围。
技术特征:
1.一种智能建造无线遥控吊塔视角跟随转换装置,其特征在于,包括作为主体的吊钩部分和安装于所述吊钩部分上的平台部分,其中:所述吊钩部分包括吊钩、以及由下至上固定在所述吊钩上的固定轴承与圆环形固定齿条;所述平台部分包括作为整体支撑的旋转平台、以及固定于所述旋转平台上的旋转电机、plc控制器、继电器组、拉线传感器、雷达侦测器、雷达控制器、网络摄像头;所述plc控制器通过导线分别与所述继电器组、拉线传感器、雷达控制器、网络摄像头连接;所述继电器组通过导线与所述旋转电机连接;所述雷达控制器通过导线与所述雷达侦测器连接。2.根据权利要求1所述的智能建造无线遥控吊塔视角跟随转换装置,其特征在于,所述旋转平台通过中部圆形开口与所述固定轴承固定连接,所述旋转电机与旋转齿轮嵌合,所述旋转齿轮与圆环形固定齿条啮合连接。
技术总结
本实用新型公开了一种智能建造无线遥控吊塔视角跟随转换装置,包括作为主体的吊钩部分和安装于所述吊钩部分上的平台部分,其中:所述吊钩部分包括吊钩、以及由下至上固定在所述吊钩上的固定轴承与圆环形固定齿条;所述平台部分包括作为整体支撑的旋转平台,以及固定于所述旋转平台上的旋转电机、PLC控制器、继电器组、拉线传感器、雷达侦测器、雷达控制器、网络摄像头;所述PLC控制器通过导线分别与所述继电器组、拉线传感器、雷达控制器、网络摄像头连接;所述继电器组通过导线与所述旋转电机连接;所述雷达控制器通过导线与所述雷达侦测器连接。本实用新型在地面上就可以观察吊件状况,以满足工程安全建设需要。以满足工程安全建设需要。以满足工程安全建设需要。
技术研发人员:王帅 游明 李文祥 王爱勋 陆通 王明昭 李琪瑞 肖修龙 方一丰
受保护的技术使用者:武汉建工集团股份有限公司
技术研发日:2021.08.06
技术公布日:2022/2/18
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。