1.本发明属于离心压气机领域,具体涉及一种基于氢-空气燃料电池的高空无人机离心压气机控制方法。
背景技术:
2.高空长航时无人机的能量来源可以是常规动力、太阳能动力、氢动力和混合动力等,而氢动力无人机因航空用燃料电池具有转化率高、功重比高和能量密度大等特点,同时在结构设计方面与太阳能动力无人机相比不需要超大展弦比设计,使得无人机结构较强。氢-空气燃料电池动力系统电化学反应所需空气工质通过从外部环境大气引气并经过压气机增压实现。相比于容积式压气机,速度型压气机不存在转子结构的固有不平衡,可工作在远高于容积压气机的转速之上,使得同流量、压比条件下,速度型压气机的重量和体积远小于容积式压气机,且有振动与噪声较小、输出气流连续、出口压力脉动小等优点。
3.压气机作为无人机氢燃料电池动力系统中的核心关键部件,其使用工况、功能要求与性能要求与航空发动机压气机类似。现在航空发动机或飞机辅助装置单元多采用轴流或者轴流与离心混合压气机类型,而在基于燃料电气动力系统供电的高空长航时无人机领域,多以高压比高负荷的单级离心压气机为主,而对于压比过高单级离心压气机无法满足的情况并未提出有效实现方法。
技术实现要素:
4.本发明的目的是提供一种基于氢-空气燃料电池的高空无人机离心压气机控制方法,用以满足无人机在全海拔高度上的不同功能和性能需求。
5.为达到上述目的,本发明采用如下技术方案予以实现:
6.一种基于氢-空气燃料电池的高空无人机离心压气机控制方法,在高空无人机中设置有压气机多级串联系统,该系统包括低压压气机系统、中压压气机系统和高压压气机系统;
7.在低空海拔时,仅启用高压压气机系统,高压压气机系统吸气口连接环境大气,出口连接氢-空气燃料电池系统;
8.在中空海拔时,启用中压压气机系统和高压压气机系统,中压压气机系统吸气口连接环境大气,出口连接高压压气机系统吸气口,高压压气机系统出口连接氢-空气燃料电池系统;
9.在高空海拔时,启用低压压气机系统、中压压气机系统和高压压气机系统,低压压气机系统吸气口连接环境大气,出口连接中压压气机系统吸气口,中压压气机系统出口连接高压压气机系统吸气口,高压压气机系统出口连接氢-空气燃料电池系统。
10.进一步地,从高海拔到中海拔再到低海拔的下降过程中,压气机系统的关闭启用顺序与从低海拔到中海拔再到高海拔的爬升过程相反。
11.进一步地,低压压气机系统、中压压气机系统和高压压气机系统中均包括:吸气过
滤装置、除湿装置、压气机装置、冷却装置。
12.进一步地,所述压气机装置为离心压气机形式;离心压气机装置的驱动分别由直驱电机驱动或统一由同一直驱电机驱动;离心压气机装置均为一级压缩。
13.进一步地,所述离心压气机装置中的支撑采用磁浮轴承或气浮轴承支撑。
14.进一步地,所述低空海拔为0—6000m海拔高度,中空海拔为6000m—12000m海拔高度,高空海拔为12000m—20000m海拔高度。
15.进一步地,低压压气机系统、中压压气机系统和高压压气机系统的吸气管路端部连接大气环境,在这三个系统的吸气管路上分别安装第三进气阀、第二进气阀、第一进气阀;中压压气机系统、高压压气机系统的排气管路端部连接大气环境,并在这两个系统的排气管路上分别安装第二排气阀、第一排气阀;低压压气机系统的排气管路连接中压压气机系统的吸气管路并安装有第一连通阀,中压压气机系统的排气管路连接高压压气机系统的吸气管路并安装有第二连通阀;高压压气机系统的排气管路连接氢-空气燃料电池系统的入口。
16.进一步地,所述第一进气阀、第二进气阀、第三进气阀、第一排气阀、第二排气阀、第一连通阀和第二连通阀均为电磁阀,由压气机控制系统中的阀驱动器驱动控制;压气机控制系统中还设置有压气机控制器、电机驱动器和磁轴承驱动器,其中,压机器控制器分别与低压压气机系统、中压压气机系统和高压压气机系统连接,用于控制这三个系统的工作状态;电机驱动器用于驱动直驱电机,磁轴承驱动器用于驱动支撑离心压气机装置的磁浮轴承。
17.与现有技术相比,本发明具有以下技术特点:
18.本发明解决了因不同吸气环境引起的压气机匹配问题。采用离心压气机装置串联,实现了压气机级数少就能实现高压比的需求。不同海拔高度启用不同的压气机系统,有效解决了不同吸气环境下压气机流量与压比的匹配性需求,还在飞行过程中优化了能耗需求;另外,采用该控制方式,使得系统布局简单,逻辑简单,结构紧凑、匹配方便,在进口管路间实现了逻辑切换处置。
附图说明
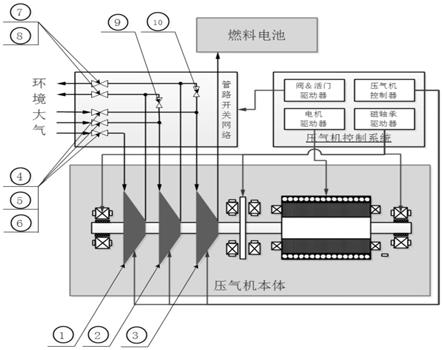
19.图1为本发明一个实施例中单台多级压气机供气系统原理布局图;
20.图2为本发明一个实施例中多台多级压气机供气系统原理布局图;
21.图中标号说明:1低压压气机系统,2中压压气机系统,3高压压气机系统,4第一进气阀,5第二进气阀,6第三进气阀,7第一排气阀,8第二排气阀,9第一连通阀,10第二连通阀。
具体实施方式
22.下面结合附图和具体实施例对本发明进行详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
23.本发明实施例提供一种基于氢-空气燃料电池的高空无人机离心压气机控制方法,实现了无人机在全海拔范围内针对不同吸气环境的压气机需求匹配方法,在保证燃料电池用压力、流量、功率等需求的前提下,精简结构、减轻重量和体积,解决了布局简单、结
构紧凑、匹配方便等系列问题,解决了因不同吸气环境引起的压气机匹配问题。
24.参见附图,本发明的基于氢-空气燃料电池的高空无人机离心压气机控制方法,在高空无人机中设置有压气机多级串联系统,该系统包括低压压气机系统1、中压压气机系统2和高压压气机系统3;
25.在低空海拔时(0—6000m海拔高度),仅启用高压压气机系统3,高压压气机系统3吸气口连接环境大气,出口连接氢-空气燃料电池系统;
26.在中空海拔时(6000m—12000m海拔高度),启用中压压气机系统2和高压压气机系统3,中压压气机系统2吸气口连接环境大气,出口连接高压压气机系统3吸气口,高压压气机系统3出口连接氢-空气燃料电池系统;
27.在高空海拔时(12000m—20000m海拔高度),启用低压压气机系统1、中压压气机系统2和高压压气机系统3,低压压气机系统1吸气口连接环境大气,出口连接中压压气机系统2,中压压气机系统2出口连接高压压气机系统3,高压压气机系统3出口连接氢-空气燃料电池系统;
28.从低海拔到中海拔再到高海拔的爬升过程中,压气机系统的启用顺序按照高压压气机系统3、中压压气机系统2和低压压气机系统1的顺序依次开启,有效(此处的有效意为使环境大气进入到实际压缩过程中去的部分)连接环境大气的吸气口遵循“向低原则”,即:同时启用中压和高压压气机系统3时,连接环境大气的吸气口为中压压气机系统2;同时启用低压、中压和高压压气机系统3时,连接环境大气的吸气口为低压压气机系统1;仅启用高压压气机系统3时,连接环境大气的吸气口为高压压气机系统3;
29.从低海拔到中海拔再到高海拔的爬升过程中,由于有效连接大气的吸气口遵从向低原则,因此在启用新的压气机系统时需要进行进口管路间的切换。
30.从高海拔到中海拔再到低海拔的下降过程中,压气机系统的关闭启用顺序与前述过程相反,有效连接环境大气的吸气口仍然遵循“向低原则”;例如在从高空海拔到中空海拔时,关闭低压压气机系统1,将中压压气机系统2的入口连接环境大气。
31.低压压气机系统1、中压压气机系统2和高压压气机系统3根据需要包含且不限于以下装置:吸气过滤装置、除湿装置、压气机装置、冷却装置等;
32.低压压气机系统1、中压压气机系统2和高压压气机系统3中所含压气机装置为离心压气机形式;
33.低压压气机系统1、中压压气机系统2和高压压气机系统3中所用离心压气机装置的驱动分别由直驱电机驱动或统一由同一直驱电机驱动;当分别驱动时,所需电机功率较小,针对于高转速的使用需求,电机体积也可以控制的更小,针对于无人机内部的有限空间便于电机的选型,且冷却系统更便于布置。
34.低压压气机系统1、中压压气机系统2和高压压气机系统3中所用离心压气机装置均为一级压缩。
35.低压压气机系统1、中压压气机系统2和高压压气机系统3中所用离心压气机装置中的支撑采用磁浮轴承或气浮轴承支撑。
36.实施例1:
37.如图1所示,提供一种基于氢-空气燃料电池动力系统的高空长航时无人机用离心压气机的实现方法,包括低压压气机系统1、中压压气机系统2和高压压气机系统3,三套系
统中所用驱动系统统一由同一直驱电机驱动,其安装轴通过磁浮轴承支撑,其中:
38.低压压气机系统1、中压压气机系统2和高压压气机系统3的吸气管路端部连接大气环境,在这三个系统的吸气管路上分别安装第三进气阀6、第二进气阀5、第一进气阀4;中压压气机系统2、高压压气机系统3的排气管路端部连接大气环境,并在这两个系统的排气管路上分别安装第二排气阀8、第一排气阀7;低压压气机系统1的排气管路连接中压压气机系统2的吸气管路并安装有第一连通阀9,中压压气机系统2的排气管路连接高压压气机系统3的吸气管路并安装有第二连通阀10;高压压气机系统3的排气管路连接氢-空气燃料电池系统的入口。
39.所述第一进气阀4、第二进气阀5、第三进气阀6、第一排气阀7、第二排气阀8、第一连通阀9和第二连通阀10均为电磁阀,由压气机控制系统中的阀驱动器驱动控制;压气机控制系统中还设置有压气机控制器、电机驱动器和磁轴承驱动器,其中,压机器控制器分别与低压压气机系统1、中压压气机系统2和高压压气机系统3连接,用于控制这三个系统的工作状态;电机驱动器用于驱动直驱电机,磁轴承驱动器用于驱动磁浮轴承。
40.在低空海拔时(0—6000m海拔高度),仅启用高压压气机系统3,此时第一进气阀4、第二进气阀5、第三进气阀6、第一排气阀7、第二排气阀8均处于开启状态,第一连通阀9和第二连通阀10处于关闭状态,低压压气机系统1和中压压气机系统2两端均连接环境大气,高压压气机系统3吸气口连接环境大气,出口连接氢-空气燃料电池系统,此时低压压气机系统1和中压压气机系统2处于低耗能的非工作状态,高压压气机系统3处于工作状态。随着海拔高度的升高,通过压气机调节系统来保证流量和压比需求。
41.在中空海拔高度时(6000m—12000m海拔高度),启用中压压气机系统2和高压压气机系统3,达到6000m海拔高度时,立即使中压压气机系统2进入工作状态,此时关闭第一进气阀4和第一排气阀7、开启第二连通阀10,其他阀门状态不变,低压压气机系统1两端均连接环境大气,中压压气机系统2吸气口连接环境大气,出口连接高压压气机系统3,高压压气机系统3出口连接氢-空气燃料电池系统,此时低压压气机系统1处于低耗能的非工作状态,中压压气机系统2和高压压气机系统3处于工作状态。随着海拔高度的升高,通过压气机调节系统来保证流量和压比需求。
42.在高空海拔高度时(12000m—20000m海拔高度),启用低压压气机系统1、中压压气机系统2和高压压气机系统3,达到12000m海拔高度时,立即使低压压气机系统1进入工作状态,此时关闭第二进气阀5和第二排气阀8、开启第一连通阀9,其他阀门状态不变,低压压气机系统1吸气口连接环境大气,出口连接中压压气机系统2,中压压气机系统2出口连接高压压气机系统3,高压压气机系统3连接氢-空气燃料电池系统,此时三个压气机系统均处于工作状态。随着海拔高度的升高,通过压气机调节系统来保证流量和压比需求。
43.从高海拔到中海拔再到低海拔的下降过程中,压气机系统的关闭启用顺序与前述过程相反,有效连接环境大气的吸气口仍然遵循前述的“向低原则”。
44.实施例2:
45.如图2所示,提供一种基于氢-空气燃料电池动力系统的高空长航时无人机用离心压气机的实现方法,包括低压压气机系统1、中压压气机系统2和高压压气机系统3,三套系统中所用驱动系统分别由各自的直驱电机驱动。
46.在低空海拔时(0—6000m海拔高度),仅启用高压压气机系统3,此时第一进气阀4、
处于开启状态,其他阀门均处于关闭状态,高压压气机系统3吸气口连接环境大气,出口连接氢-空气燃料电池系统,此时低压压气机系统1和中压压气机系统2不工作,高压压气机系统3处于工作状态。随着海拔高度的升高,通过压气机调节系统来保证流量和压比需求。
47.在中空海拔高度时(6000m—12000m海拔高度),启用中压压气机系统2和高压压气机系统3,达到6000m海拔高度时,立即使中压压气机系统2进入工作状态,此时关闭第一进气阀4、开启第二进气阀5和第二连通阀10,其他阀门状态不变,中压压气机系统2吸气口连接环境大气,出口连接高压压气机系统3,高压压气机系统3出口连接氢-空气燃料电池系统,此时低压压气机系统1不工作,中压压气机系统2和高压压气机系统3处于工作状态。随着海拔高度的升高,通过压气机调节系统来保证流量和压比需求。
48.在高空海拔高度时(12000m—20000m海拔高度),启用低压压气机系统1、中压压气机系统2和高压压气机系统3,达到12000m海拔高度时,立即使低压压气机系统1进入工作状态,此时关闭第二进气阀5、开启第三进气阀6和第一连通阀9,其他阀门状态不变,低压压气机系统1吸气口连接环境大气,出口连接中压压气机系统2,中压压气机系统2出口连接高压压气机系统3,高压压气机系统3连接氢-空气燃料电池系统,此时三个压气机系统均处于工作状态。随着海拔高度的升高,通过压气机调节系统来保证流量和压比需求。
49.从高海拔到中海拔再到低海拔的下降过程中,压气机系统的关闭启用顺序与前述过程相反,有效连接环境大气的吸气口仍然遵循前述的“向低原则”。
50.以上实施例仅用于说明本技术的技术方案,而非对其限制;尽管参照前述实施例对本技术进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行同等替换;而这些修改或替换,并不使相应技术方案的本质脱离本技术各实施例技术方案的精神和范围,均应包含在本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
