1.本发明是关于一种手工具的结构改良,尤指一种电动起子及电动起子的扭力控制装置。
背景技术:
2.电动起子为一种拆装螺栓或螺钉等锁固元件的手工具,其透过内部转动马达的旋转,使螺栓或螺钉能够快速地拆装于待加工的表面。
3.而现有技术的电动起子,具设计上有可调整其扭力的结构,因为电动起子需根据待加工表面的材质、硬度,以及螺钉或螺栓本身的结构强度,进行其旋转力道的调整,以避免力道太强时对待加工表面以及螺栓本身结构的破坏,或是力道太弱时,电动起子可能无法将螺栓稳固地设置于该加工表面。
4.具体而言,当使用者启动电动起子后,会触发其内部的控制机板,进而驱使马达带动一齿轮箱转动,齿轮箱同时也与一扭力调整装置相连接,该扭力调整装置可设定电动起子的扭力上限;另一方面,齿轮箱进一步连接有一机械式的煞车机构,该煞车机构同时连接到输出的轴组,该轴组即为电动起子的工具头。当电动起子在运转过程中达到其扭力上限后,会触发该机械式煞车机构,并回传讯息给控制机板,进而使马达停止转动,使得每个螺丝能有相同的扭力。
5.为了能确实感知螺丝上的扭力,电动起子内会设有感测装置。同时,运作时马达会高速转动,因此电动起子内必须具有润滑油才能使马达长久稳定地运作。然而,润滑油会影响感测装置的精确性,因此如何将润滑油与感测装置隔离,却又不影响电动起子的运作,便是本领域研发的重点之一。
6.另一方面,现有技术中电动起子的感测装置都是于一传动模组上连接一弹性体,并于弹性体上设置应变规,并藉由传动模组带动弹性体变形后,再以应变规所测量的变形量来计算扭力。然而,现有的传动模组是与弹性体一体成形,因此在调校或维修时必须将传动模组与弹性体一起取下,无法单独对传动模组或弹性体进行调整,造成调校及维修的成本过高。
7.有鉴于此,提出一种更佳的改善方案,乃为此业界亟待解决的问题。
技术实现要素:
8.本发明的主要目的在于,提出一种电动起子及电动起子的扭力控制装置,其能有较低的维修成本。
9.为达上述目的,本发明所提出的电动起子具有:
10.一扭力控制装置,其具有:
11.一驱动壳体,其具有相对的一前端及一后端;
12.一传动模组,其能转动地设置于该驱动壳体内;
13.一扭转套筒,其固设于该驱动壳体内,且能拆卸地连接该传动模组,且能受该传动
模组的带动而产生形变;及
14.至少一应变规,其设置于该扭转套筒上,并各该至少一应变规可侦测该扭转套筒的形变;
15.一工具头,其设置于该驱动壳体的该前端;
16.一马达,其设置于该驱动壳体的该后端,并具有:
17.一传动轴,其穿设于该扭转套筒内,并连接于该传动模组;该传动轴能带动该传动模组,并此藉驱动该工具头相对该驱动壳体转动。
18.如前所述的电动起子的扭力控制装置中:
19.该传动模组具有至少一凸块,各至少一该凸块具有二第一抵靠面,各该第一抵靠面与该传动模组的转动轴平行;
20.该扭转套筒具有至少一凹部,各至少一该凹部具有二第二抵靠面,各该第二抵靠面与该传动模组的转动轴平行;且
21.当该传动模组连接于该扭转套筒时,至少一该凸块嵌合于至少一该凹部,且该二第一抵靠面分别抵靠于该第二抵靠面。
22.如前所述的电动起子的扭力控制装置中:
23.该传动模组具有一环壁,且至少一该凸块位于该环壁上并沿该传动模组的轴心方向凸出;
24.该扭转套筒具有一前连接部,且至少一该凹部形成于该前连接部上;且
25.当该传动模组连接于该扭转套筒时,该环壁环绕该前连接部。
26.如前所述的电动起子的扭力控制装置中,该扭转套筒具有:
27.一前连接部,其能拆卸地连接于该传动模组的后方;
28.一后连接部,其固设驱动壳体并位于该前连接部的后方;
29.一感测部,其连接该前连接部及该后连接部,且该感测部的厚度小于该前连接部的厚度,该感测部的厚度小于该后连接部的厚度,并至少一该应变规设置于该感测部的外壁面上。
30.如前所述的电动起子的扭力控制装置中该感测部上进一步包含有一感测壁及多个长孔,多个该长孔彼此间隔地贯穿成形于该感测壁,且沿该感测壁的圆周方向延伸,并各至少一该应变规设置于任两相邻的多个该长孔之间。
31.如前所述的电动起子的扭力控制装置,其更具有一密封环,该密封环固设于该扭转套筒外周面,并位于至少一该应变规与该传动模组之间。
32.如前所述的电动起子的扭力控制装置,其更具有一油封,该油封固设于该扭转套筒内且套设于该传动轴,并位于至少一该应变规与该传动模组之间。
33.因此,本发明的优点在于传动模组与扭转套筒是可分离的,因此在调校或维修时,只要替换对应部分即可,不需要将传动模组与扭转套筒一同更换,大幅节省成本。另一方面,透过密封环及油封防止传动模组内的润滑油流到应变规,可提升应变规的耐久性及准确度,而不会受润滑油的影响。
附图说明
34.在此描述的附图仅用于解释目的,而不意图以任何方式来限制本发明公开的范
围。另外,图中的各部件的形状和比例尺寸等仅为示意性的,用于帮助对本发明的理解,并不是具体限定本发明各部件的形状和比例尺寸。本领域的技术人员在本发明的教导下,可以根据具体情况选择各种可能的形状和比例尺寸来实施本发明。
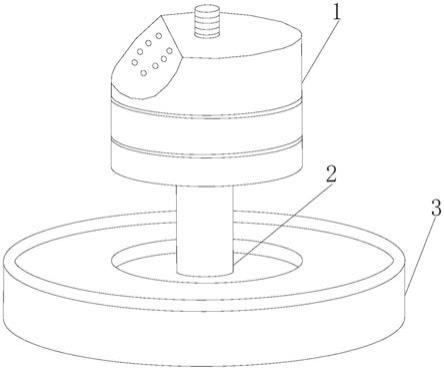
35.图1为本发明的电动起子的工具头、马达、及扭力控制装置的立体示意图。
36.图2为本发明的电动起子的工具头、马达、及扭力控制装置的立体分解图。
37.图3为本发明的电动起子的工具头、马达、及扭力控制装置的剖面示意图。
38.图4为本发明的扭力控制装置的立体示意图。
39.图5为本发明的扭力控制装置的立体分解图。
40.图6为本发明的扭力控制装置的扭转套筒、密封环、及油封的立体示意图。
41.图7为本发明的扭力控制装置的剖面示意图。
42.图8为本发明的扭力控制装置的扭转套筒的剖面示意图。
具体实施方式
43.结合附图和本发明具体实施方式的描述,能够更加清楚地了解本发明的细节。但是,在此描述的本发明的具体实施方式,仅用于解释本发明的目的,而不能以任何方式理解成是对本发明的限制。在本发明的教导下,技术人员可以构想基于本发明的任意可能的变形,这些都应被视为属于本发明的范围。
44.需要说明的是,当元件被称为“固定于”或“设置于”另一个元件,它可以直接在另一个元件上或者可能存在居中元件。当一个元件被称为是“连接于”另一个元件,它可以是直接连接到另一个元件或者可能存在居中元件。
45.首先请参考图1至图3。本发明提出一电动起子,其具有一工具头10、一马达20、及一扭力控制装置30,工具头10及马达20分别设置于扭力控制装置30的前端及后端。马达20具有一传动轴21。以下说明中,以工具头10所在的位置为前方,马达20所在的位置为后方。
46.接着请参考图3至图5。扭力控制装置30具有一驱动壳体31、一传动模组32、一扭转套筒33、及至少一应变规34,并可选择性地具有一密封环35、及一油封36、及/或至少一转动轴承37。
47.驱动壳体31具有相对的一前端及一后端,并驱动壳体31的前端连接于工具头10,而后端连接于马达20。传动模组32可转动地设置于驱动壳体31内,并可用以驱动工具头10相对驱动壳体31转动。本实施例中,传动模组32包含一行星齿轮组。
48.传动模组32还具有一环壁321及至少一凸块322,至少一凸块322位于环壁321上并沿传动模组32的轴心方向凸出。本实施例中具有多个凸块322,因此大致呈冠状。各凸块322具有二第一抵靠面,各第一抵靠面与传动模组32的转动轴平行。
49.接着请参考图1、图6、及图7。扭转套筒33固设于驱动壳体31内,且可拆卸地连接于传动模组32,因此可受传动模组32的带动而产生形变。本实例中是依序以工具头10、传动模组32、扭转套筒33、马达20排列,但传动模组32及扭转套筒33的相对位置不以此为限。此外,本实施例中,扭转套筒33为一圆柱状的套筒,但其形状亦不以圆柱为限。马达20的传动轴21穿设于扭转套筒33内,并连接于传动模组32,并此藉带动传动模组32驱动工具头10相对该驱动壳体31转动。
50.扭转套筒33进一步包含有一前连接部331、一后连接部332及一感测部333。前连接
部331设置于传动模组32的后方,后连接部332设置于前连接部331的后方,而感测部333则连接于前连接部331及后连接部332之间。
51.于本实施例中,扭转套筒33可为一两端贯通的圆柱套筒,并感测部333的厚度小于前连接部331的厚度,且感测部333的厚度也小于后连接部332的厚度。感测部333包含有一感测壁3331及多个长孔3332,前述关于感测部333的厚度即系指感测壁3331的厚度,并多个该长孔3332彼此间隔地贯穿成形于感测壁3331上,且沿该感测壁3331的圆周方向延伸。
52.接着请一并参考图5。扭转套筒33具有至少一凹部3310,且本实施例是具有多个凹部3310。凹部3310的数量等于传动模组32的凸块322的数量。具体而言,凹部3310是形成于前连接部331上,并沿垂直于传动模组32的转动轴的方向内凹,但其结构并不以此为限。各凹部3310具有二第二抵靠面,各第二抵靠面与传动模组32的转动轴平行。当传动模组32连接于该扭转套筒33时,环壁321环绕前连接部,而各凸块322分别嵌合于一凹部3310,且各凸块322的二第一抵靠面分别抵靠于凹部3310的第二抵靠面。藉由凸块322的第一抵靠面与凹部3310的第二抵靠面皆与传动模组32的转动轴平行,因此当传动模组32转动时能以施于凹部3310的第二抵靠面的正向力来造成扭转套筒33扭转。
53.接着请参考图6。各应变规34设置于扭转套筒33上,并可用以侦测及记录扭转套筒33的形变,本实施例中,应变规34的数量为多个,但其不以此为限,并该等应变规34设置于感测部333的外壁面上,更精确地说,各应变规34设置于任两相邻的长孔3332之间,使长孔3332与应变规34彼此交错地位于该感测壁3331上。
54.接着请参考图6至图8。本实施例中,扭转套筒33的前连接部331与传动模组32内的环齿轮(图中未示)相固设,而扭转套筒33的后连接部332则透过多个螺栓螺合固定于驱动壳体31的内部,并当传动模组32内部的行星齿轮组在扭转到一定扭力后,行星齿轮组的太阳齿轮会因为无法顺利带动环齿轮一并转动,进而使环齿轮开始带动扭转套筒33的前端一并扭转。由于扭转套筒33的后端受到驱动壳体31的固定,前连接部331与后连接部332即会相对转动,而位于前连接部331与后连接部332之间的感测部333即会发生扭转。
55.此时,设于感测部333上的应变规34即能感应感测部333的形变量。由于应变规34会电连接至一讯号感测装置40,并透过讯号感测装置40将应变规34所记录到的数值传递至外部的计算机,本实施例中,讯号感测装置40可设置于扭转套筒33内,但其设置位置不以此为限。
56.密封环35固设于扭转套筒33外周面,并抵靠于驱动壳体31内壁面,且密封环35位于应变规34与传动模组32之间。油封36固设于扭转套筒33内,并位于应变规34与传动模组32之间,且本实施例中油封36还套设于马达20的传动轴21上。透过密封环35及油封36,可防止传动模组32内的润滑油流到应变规34上。
57.接着请参考图7。该至少一转动轴承37设置于驱动壳体31内,并本实施例中,该至少一转动轴承37的数量为两个,并该两转动轴承37分别沿前后设置,套设于传动模组32上,且各该转动轴承37的内侧面及外侧面分别贴合于传动模组32及驱动壳体31的内壁面。
58.接着请参考图3、图6、及图7。于使用本发明时,可透过讯号感测装置40连接到外部的计算机(图中未示),并透过计算机预先设定马达20扭力传输的上限,此一讯号感测装置同时可传递煞车、加工工序以及计数等数据。
59.实际操作时,当使用者启动电动起子,使马达开始运转并将一螺栓或螺钉透过工
具头10的转动而逐渐锁入待加工的物体后,工具头10所承受到的扭力会逐渐转移到扭转套筒33上,并使扭转套筒33开始略为扭转,此一扭转形变量产生后,会被应变规34所记录,并透过讯号感测装置40回传给外部的控制器或计算机,当应变规34所记录的量到达使用前预设的数值时,控制器或计算机便会将马达20停止运转,进而使电动起子停止,完成整个扭转的行为。
60.综上所述,本发明的优点如下:
61.第一,本发明中的传动模组32与扭转套筒33是可分离的,因此在调校或维修时,只要取下对应部分即可,不需要将传动模组32与扭转套筒33一同更换,大幅节省成本。另一方面,透过密封环35及油封36防止传动模组32内的润滑油流到应变规34,可提升应变规34的耐久性及准确度,而不会受润滑油的影响。
62.第二,请参阅图3所示,透过装设有可以侦测及记录形变量的应变规34,本发明得以记录每一次加工过程中的数据,借此判断并统整每一次加工所产生的结果、误差等状况,透过此一数据的汇整,本发明可进一步搭配工厂内各项设施达到工业4.0的目的。
63.第三,透过扭力数值的回馈,使用者便可透过控制器或计算机操控单一电动起子所传输的扭力值,换言之,使用者可针对每支电动起子在每一次加工流程中的扭力上限进行调整,已达到更适切地配合不同加工对象的目的,同时,使用电动起子的操作员也毋须再为了使用不同扭力的电动起子而准备多支电动起子,而使可透过计算机操控,迅速而直接地调整每一支电动起子当下的扭力上限。
64.第四,使用扭转套筒33做为侦测扭力的装置,其可降低电动起子在使用过程中的装备耗损率,因此可提高单一电动起子的使用寿命。
65.针对上述各实施方式的详细解释,其目的仅在于对本发明进行解释,以便于能够更好地理解本发明,但是,这些描述不能以任何理由解释成是对本发明的限制,特别是,在不同的实施方式中描述的各个特征也可以相互任意组合,从而组成其他实施方式,除了有明确相反的描述,这些特征应被理解为能够应用于任何一个实施方式中,而并不仅局限于所描述的实施方式。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。