1.本技术涉及自行车领域,尤其涉及一种具有悬浮坐垫的自行车以及适用自行车的磁力调控方法。
背景技术:
2.传统自行车,坐垫的舒适性是骑乘者注重的一个重要环节。
3.因此,如何提供一种能够提供乘坐舒适性的悬浮坐垫的自行车,已经是业界的一个重要课题。
技术实现要素:
4.本技术所要解决的技术问题在于,针对现有技术的不足提供一种具有悬浮坐垫的自行车,包括:一车架;一坐垫基座,设置在所述车架上;一悬浮坐垫,设置在所述坐垫基座的一侧;一控制模块;一电池模块;以及一磁力调控模块,包括一第一磁力调控单元以及一第二磁力调控单元,所述第一磁力调控单元设置在所述坐垫基座上,所述第二磁力调控单元设置在所述悬浮坐垫上,所述第一磁力调控单元以及所述第二磁力调控单元是对应设置的;其中,所述控制模块电性连接所述电池模块以及所述磁力调控模块的所述多个磁力调控单元;其中,所述控制模块分别提供多个控制信号给所述电池模块以及所述磁力调控模块的所述第一磁力调控单元以及所述第二磁力调控单元,以使对应设置的所述第一磁力调控单元以及所述第二磁力调控单元产生一电磁力,致使所述悬浮坐垫悬浮设置在所述坐垫基座上方一第一预定距离。
5.可选地,所述悬浮坐垫包括一牵引柱,所述坐垫基座包括一牵引孔洞,所述牵引柱设置在所述牵引孔洞中,所述牵引柱是移动地设置在所述牵引孔洞中。
6.可选地,所述第一磁力调控单元包括一第一基座磁力组件,所述第二磁力调控单元包括一第一坐垫磁力单元。
7.可选地,所述第一磁力调控单元包括多个第一基座磁力组件,所述第二磁力调控单元包括多个第一坐垫磁力单元,所述多个第一基座磁力组件与所述多个第一坐垫磁力单元对应设置。
8.可选地,所述第一基座磁力组件设置在所述坐垫基座的中间区域,所述第一坐垫磁力组件设置在所述悬浮坐垫的中间区域
9.可选地,所述第一磁力调控单元还包括一第二基座磁力组件,所述第二磁力调控单元还包括一第二坐垫磁力组件,所述第二基座磁力组件设置在所述第一基座磁力组件的一侧,所述第二坐垫磁力组件设置在所述第一坐垫磁力组件的一侧,所述第二基座磁力组件以及所述第二坐垫磁力组件是对应设置的。
10.可选地,所述第一基座磁力组件是一强力磁铁,所述第一坐垫磁力组件是一电磁铁组件。
11.可选地,所述第一磁力调控单元还包括一第二基座磁力组件,所述第二磁力调控
单元还包括一第二坐垫磁力单元,所述第二基座磁力组件设置在所述第一基座磁力组件的一侧,所述第二坐垫磁力组件设置在所述第一坐垫磁力组件的一侧,所述第二基座磁力组件以及所述第二坐垫磁力组件对应设置。
12.可选地,所述第一基座磁力组件设置在所述坐垫基座的中间区域,所述第一坐垫磁力组件设置在所述悬浮坐垫的中间区域。
13.可选地,所述第一磁力调控单元还包括一第三基座磁力组件以及一第四基座磁力组件,所述第二磁力调控单元还包括一第三坐垫磁力单元以及一第四坐垫磁力单元,所述第二基座磁力组件、所述第三基座磁力组件以及所述第四基座磁力组件设置在所述第一基座磁力组件的周围,所述第二坐垫磁力组件、所述第三坐垫磁力组件以及所述第四坐垫磁力组件设置在所述第一坐垫磁力组件的周围,所述第三基座磁力组件以及所述第三坐垫磁力组件对应设置,所述第四基座磁力组件以及所述第四坐垫磁力组件对应设置。
14.可选地,所述控制模块根据所述传感器模块的一行驶状态信号,提供多个控制信号给所述坐垫基座的所述第一磁力调控单元,以使所述坐垫基座以及所述悬浮坐垫之间具有一第一夹角或是一第二夹角。
15.可选地,所述坐垫基座包括一前端以及一后端,所述悬浮坐垫包括一前端以及一后端,所述第一夹角是设置在所述坐垫基座的所述前端以及所述悬浮坐垫的所述前端之间,所述第二夹角是设置在所述坐垫基座的所述后端以及所述悬浮坐垫的所述后端之间。
16.可选地,所述传感器模块包括一陀螺仪传感器或是一加速度传感器,提供所述自行车的所述行驶状态信号,所述行驶状态信号包括一上坡信号、一下坡信号以及一平坦行驶信号。
17.可选地,当所述传感器模块提供所述控制模块的所述行驶状态信号是所述上坡信号时,所述悬浮坐垫的所述后端与所述坐垫基座的所述后端之间的一后端距离大于所述悬浮坐垫的所述前端与所述坐垫基座的所述前端之间的一前端距离。
18.可选地,当所述传感器模块提供所述控制模块的所述行驶状态信号是所述下坡信号时,所述悬浮坐垫的所述后端与所述坐垫基座的所述后端之间的所述后端距离小于所述悬浮坐垫的所述前端与所述坐垫基座的所述前端之间的所述前端距离。
19.可选地,还包括:一储存模块,电性连接所述控制模块;以及一通讯模块,电性连接所述控制模块,所述通讯模块包括一有线通讯单元以及一无线通信单元,所述自行车利用所述通讯模块与一移动装置或是一服务器进行通讯连接。
20.本技术还公开了一种磁力调控方法,适用于一具有一悬浮坐垫的一自行车,所述自行车包括一车架、一磁力调控模块、一坐垫基座以及一悬浮坐垫,所述坐垫基座与所述悬浮坐垫对应设置,所述磁力调控模块包括一第一磁力调控单元以及一第二磁力调控单元,所述第一磁力调控单元设置在所述坐垫基座上,所述第二磁力调控单元设置在所述悬浮坐垫上,所述磁力调控方法包括:
21.以一第一回转率提供逐渐增加的至少一第一电流给所述磁力调控模块的所述第一磁力调控单元,直至所述至少一第一电流增加到一第一电流默认值为止;
22.持续地调整所述至少一电流,以使所述至少一第一电流介于一电流区间中;以及
23.当所述自行车停止时,且悬浮坐垫上没有侦测到重量时,以一第二回转率提供一逐渐减少的至少一第二电流给所述磁力调控模块的所述第一磁力调控单元,直至所述至少
一第二电流减少到0为止。
24.可选地,所述自行车还包括一传感器模块,所述传感器模块包括一压力传感器,所述磁力调控方法还包括:以所述第一回转率提供逐渐增加的多个第一电流给所述磁力调控模块的所述第一磁力调控单元,直至所述多个第一电流增加到所述第一电流默认值为止;判断所述自行车的一行驶状态;当所述自行车的所述行驶状态在一平坦行驶状态时,则持续地调整所述多个第一电流在一电流区间中;当所述自行车的所述行驶状态是一上坡状态时,则调整提供给所述磁力调控模块的所述第一磁力调控单元的所述多个第一电流,使所述悬浮坐垫的一前端与所述坐垫基座的一前端之间的一前端距离小于所述悬浮坐垫的一后端与所述坐垫基座的一后端之间的一后端距离;当所述自行车的所述行驶状态是一下坡状态时,则调整提供给所述磁力调控模块的所述第一磁力调控单元的所述多个第一电流,使所述悬浮坐垫的所述前端与所述坐垫基座的所述前端之间的所述前端距离大于所述悬浮坐垫的所述后端与所述坐垫基座的所述后端之间的所述后端距离;以及当所述自行车的所述行驶状态是一停止状态时,且所述悬浮坐垫上没有侦测到重量时,以一第二回转率提供逐渐减少的多个第二电流给所述磁力调控模块的所述第一磁力调控单元,直至所述多个电流减少到0为止。
25.可选地,所述传感器模块包括一压力传感器或是一重量传感器,用于侦测所述悬浮坐垫是否有承载重量。
26.本技术的其中一有益效果在于,本技术所提供的具有悬浮坐垫的自行车以及磁力调控方法,可以有效控制悬浮坐垫,并且在自行车的不同行驶状态下提供舒适乘坐的体验。
27.为使能更进一步了解本技术的特征及技术内容,请参阅以下有关本技术的详细说明与图式,然而所提供的图式仅用于提供参考与说明,并非用来对本技术加以限制。
附图说明
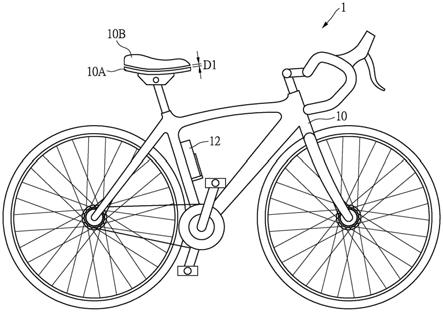
28.图1是本技术第一实施例的自行车的示意图。
29.图2是本技术第一实施例的自行车的另一示意图。
30.图3是本技术第一实施例的自行车的功能方块图。
31.图4是本技术第一实施例的坐垫基座与悬浮坐垫的示意图。
32.图5是本技术第一实施例的坐垫基座与悬浮坐垫的另一示意图。
33.图6是本技术第一实施例的坐垫基座与悬浮坐垫的另一示意图。
34.图7是本技术第一实施例的坐垫基座与悬浮坐垫的另一示意图。
35.图8是本技术第一实施例的坐垫基座与悬浮坐垫的另一示意图。
36.图9是本技术第一实施例的坐垫基座与悬浮坐垫的另一示意图。
37.图10是本技术第一实施例的悬浮坐垫的示意图。
38.图11是本技术第一实施例的悬浮坐垫的另一示意图。
39.图12是本技术第一实施例的悬浮坐垫的另一示意图。
40.图13是本技术第一实施例的坐垫基座与悬浮坐垫的另一示意图。
41.图14是本技术第一实施例的坐垫基座与悬浮坐垫的另一示意图。
42.图15是本技术第二实施例的磁力调控方法的流程图。
43.图16是本技术第二实施例的磁力调控方法的另一流程图。
具体实施方式
44.以下是通过特定的具体实施例来说明本技术所提供有关“天线结构”的实施方式,本领域技术人员可由本说明书所提供的内容了解本技术的优点与效果。本技术可通过其他不同的具体实施例加以施行或应用,本说明书中的各项细节也可基于不同观点与应用,在不悖离本技术的构思下进行各种修改与变更。另外,本技术的附图仅为简单示意说明,并非依实际尺寸的描绘,事先声明。以下的实施方式将进一步详细说明本技术的相关技术内容,但所提供的内容并非用以限制本技术的保护范围。
45.应当可以理解的是,虽然本文中可能会使用到“第一”、“第二”、“第三”等术语来描述各种组件或者信号,但这些组件或者信号不应受这些术语的限制。这些术语主要是用以区分一组件与另一组件,或者一信号与另一信号。另外,本文中所使用的术语“或”,应视实际情况可能包含相关联的列出项目中的任一个或者多个的组合。
46.[第一实施例]
[0047]
本实施例公开一种具有悬浮坐垫的自行车,可以增加使用者舒适体验以及提高避震效能。
[0048]
请参阅图1、图2、图3,图1是本技术第一实施例的自行车的示意图。图2是本技术第一实施例的自行车的另一示意图。图3是本技术第一实施例的自行车的功能方块图。
[0049]
自行车1包括一车架10、一坐垫基座10a、一悬浮坐垫10b、一控制模块11、一电池模块12、一磁力调控模块13、一充电模块14、一通讯模块15、一传感器模块16以及一储存模块17。控制模块11电性连接电池模块12、磁力调控模块13、充电模块14、通讯模块15、传感器模块16以及储存模块17。
[0050]
请参阅图4以及图5,图4是本技术第一实施例的坐垫基座与悬浮坐垫的示意图。图5是本技术第一实施例的坐垫基座与悬浮坐垫的另一示意图。
[0051]
坐垫基座10a设置在车架10上,车架10包括车身(图未示)、车胎(图未示)以及传动装置(图未示)。在本实施例中,悬浮坐垫10b设置在坐垫基座10a上。磁力调控模块13包括一第一磁力调控单元131以及一第二磁力调控单元132。第一磁力调控单元131设置在坐垫基座10a上,第二磁力调控单元132设置在悬浮坐垫10b上。
[0052]
在磁力调控模块13启动时,悬浮坐垫10b可以通过磁力调控模块13的磁力悬浮在坐垫基座10a的上方一距离。
[0053]
控制模块11是一中央处理器(cpu)、特殊应用集成电路(asic)、一微处理器(mcu)。
[0054]
电池模块12可以是一充电电池模块。电池模块12可以是锂离子电池、镍氢电池或是锂离子聚合物电池。
[0055]
移动装置m1包括一智能手机、一平板计算机、一穿戴式电子装置。
[0056]
充电模块14可以是一直流转直流电压转换器或是一交流转直流电压转换器。充电模块14电性连接电池模块12。
[0057]
在本实施例中,充电模块14设置在自行车1的传动装置(图未示)上,转换传动装置(图未示)齿轮转动的能量成为电能,对电池模块12进行充电。
[0058]
通讯模块15包括一有线通讯单元151以及一无线通信单元152。有线通讯单元151包括一连接器(图未示)以及一通讯线材(图未示)。控制模块11通过连接器(图未示)电性连接一移动装置m1。连接器(图未示)是一lightning连接器、一type-c usb连接器或是一
micro usb连接器。无线通信单元152则可以包括一wi-fi通讯单元、一蓝牙通讯单元、一紫蜂通讯单元(zigbee)、一lora通讯单元、一sigfox通讯单元、一nb-iot通讯单元。
[0059]
传感器模块16包括多种传感器,例如陀螺仪传感器、地磁传感器、红外线传感器、雷射传感器、照度传感器、嗅觉气体传感器、影像撷取传感器或是一加速度传感器等。其中,红外线传感器或是雷射传感器则是设在自行车1的前方,用于侦测行进路径的路面状况(爬升坡或是下降坡)、是否有障碍物、以及与自行车1与障碍物之间的距离。在本实施例中,传感器模块16至少包括一陀螺仪传感器(图未示)或是一加速度传感器。
[0060]
储存模块17是用于储存使用者使用悬浮坐垫10b时的磁力相关参数以及使用者习惯参数。
[0061]
自行车1具有网络通讯功能,可透过移动装置m1的网络与一服务器s1进行通讯连接。
[0062]
请参阅图4,图4是悬浮坐垫10b通过磁力悬浮设置在坐垫基座10a上一第一预定距离d1的示意图。在本实施例中,坐垫基座10a与悬浮坐垫10b之间的磁力大小可以根据磁力调控模块13进行调整。
[0063]
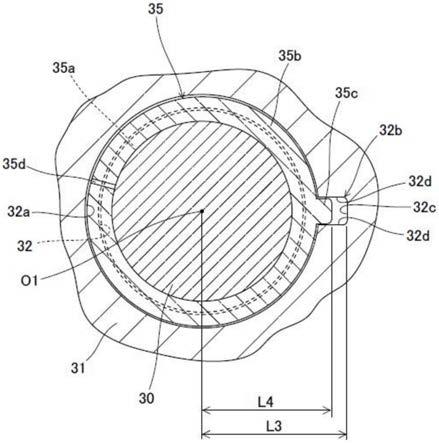
请参阅图5,图5也是悬浮坐垫10b通过磁力悬浮设置在坐垫基座10a上一第一预定距离d1的示意图。然而,悬浮坐垫10b包括一牵引柱10c。牵引柱10c设置在坐垫基座10a的一牵引孔洞10h中。当悬浮坐垫10b通过磁力调控模块13的磁力进行悬浮之后,悬浮坐垫10b的一侧可以被束缚在坐垫基座的牵引孔洞10h中。悬浮坐垫10b不会因为剧烈运动或是外力碰撞而脱离车架10。在本实施例中,牵引柱10c是移动地设置在牵引孔洞10h中。
[0064]
请参阅图6、图7以及图8,图6是本技术第一实施例的坐垫基座与悬浮坐垫的另一示意图。图7是本技术第一实施例的坐垫基座与悬浮坐垫的另一示意图。图8是本技术第一实施例的坐垫基座与悬浮坐垫的另一示意图。
[0065]
请参阅图6,磁力调控模块13的第一磁力调控单元131包括一第一基座磁力组件ma1,设置在坐垫基座10a的中间区域。磁力调控模块13的第二磁力调控单元132包括一第一坐垫磁力组件mb1,设置在悬浮坐垫10b的中间区域。第一基座磁力组件ma1以及第一坐垫磁力组件mb1是对应设置。
[0066]
在本实施例中,第一坐垫磁力组件mb1是一强力磁铁。第一基座磁力组件ma1是一电磁铁组件。第一基座磁力组件ma1电性连接控制模块11以及电池模块12。电池模块12提供一电能给第一基座磁力组件ma1以及控制模块11。
[0067]
简而言之,第二基座磁力组件ma2设置在第一基座磁力组件ma1的一侧。第二坐垫磁力组件mb2设置在第一坐垫磁力组件mb1的一侧。第二基座磁力组件ma2以及第二坐垫磁力组件mb2是对应设置的。
[0068]
请参阅图7,磁力调控模块13的第一磁力调控单元131包括一第一基座磁力组件ma1以及一第二基座磁力组件ma2,设置在坐垫基座10a的前端与后端。磁力调控模块13的第二磁力调控单元132包括一第一坐垫磁力组件mb1以及一第二坐垫磁力组件mb2,设置在悬浮坐垫10b的前端与后端。第一基座磁力组件ma1以及第一坐垫磁力组件mb1是对应设置。第二基座磁力组件ma2以及第二坐垫磁力组件mb2是对应设置。
[0069]
在本实施例中,第一坐垫磁力组件mb1以及第二坐垫磁力组件mb2分别是一强力磁铁。第一基座磁力组件ma1以及第二基座磁力组件ma2分别是一电磁铁组件。第一基座磁力
组件ma1以及第二基座磁力组件ma2电性连接控制模块11以及电池模块12。电池模块12提供一电能给第一基座磁力组件ma1、第二基座磁力组件ma2以及控制模块11。
[0070]
请参阅图8,磁力调控模块13的第一磁力调控单元131包括一第一基座磁力组件ma1、一第二基座磁力组件ma2以及一第三基座磁力组件ma3,设置在坐垫基座10a的前端、中间区域与后端。磁力调控模块13的第二磁力调控单元132包括一第一坐垫磁力组件mb1、一第二坐垫磁力组件mb2以及一第三坐垫磁力组件mb3,设置在悬浮坐垫10b的前端、中间区域与后端。第一基座磁力组件ma1以及第一坐垫磁力组件mb1是对应设置。第二基座磁力组件ma2以及第二坐垫磁力组件mb2是对应设置。第三基座磁力组件ma3以及第三坐垫磁力组件mb3是对应设置。
[0071]
在本实施例中,第一坐垫磁力组件mb1、第二坐垫磁力组件mb2以及第三坐垫磁力组件mb3分别是一强力磁铁。第一基座磁力组件ma1、第二基座磁力组件ma2以及第三基座磁力组件ma3分别是一电磁铁组件。第一基座磁力组件ma1、第二基座磁力组件ma2以及第三基座磁力组件ma3电性连接控制模块11以及电池模块12。电池模块12提供一电能给第一基座磁力组件ma1、第二基座磁力组件ma2、第三基座磁力组件ma3以及控制模块11。在本实施例中,磁力组件的设置位置与数量可以根据实际需求调整,在本技术中不做限制。
[0072]
请参阅图9以及图10,图9是本技术第一实施例的坐垫基座与悬浮坐垫的另一示意图。图10是本技术第一实施例的悬浮坐垫的示意图。
[0073]
请参阅图9,磁力调控模块13的第一磁力调控单元131包括一第一基座磁力组件ma1、一第二基座磁力组件ma2、一第三基座磁力组件ma3以及一第四基座磁力组件ma4,分别设置在坐垫基座10a的三个角落以及中间区域。三个角落的第一基座磁力组件ma1、第二基座磁力组件ma2以及第三基座磁力组件ma3呈一三角形方式设置。第四基座磁力组件ma4则是设置在坐垫基座10a的中间区域。
[0074]
磁力调控模块13的第二磁力调控单元132包括一第一坐垫磁力组件mb1、一第二坐垫磁力组件mb2、一第三坐垫磁力组件mb3以及第四坐垫磁力组件,分别设置在悬浮坐垫10b的三个角落以及中间区域。
[0075]
三个角落的第一坐垫磁力组件mb1、第二坐垫磁力组件mb2以及第三坐垫磁力组件mb3呈一三角形方式设置。第四坐垫磁力组件mb4则是设置在悬浮坐垫10b的中间区域。在其他实施例中,第一坐垫磁力组件mb1可以设置在中间区域,第二坐垫磁力组件mb2、第三坐垫磁力组件mb3以及第四坐垫磁力组件mb4则是设置在第一座垫磁力组件的周围。
[0076]
第一基座磁力组件ma1以及第一坐垫磁力组件mb1是对应设置。第二基座磁力组件ma2以及第二坐垫磁力组件mb2是对应设置。第三基座磁力组件ma3以及第三坐垫磁力组件mb3是对应设置。第四基座磁力组件ma4以及第四坐垫磁力组件mb4是对应设置。类似地,在其他实施例中,第一基座磁力组件ma1可以设置在中间区域,第二基座磁力组件ma2、第三基座磁力组件ma3以及第四基座磁力组件ma4则是设置在第一座垫磁力组件的周围。
[0077]
在本实施例中,第一坐垫磁力组件mb1、第二坐垫磁力组件mb2、第三坐垫磁力组件mb3以及第四坐垫磁力组件mb4分别是一强力磁铁。第一基座磁力组件ma1、第二基座磁力组件ma2、第三基座磁力组件ma3以及第四基座磁力组件ma4分别是一电磁铁组件。第一基座磁力组件ma1、第二基座磁力组件ma2、第三基座磁力组件ma3以及第四基座磁力组件ma4电性连接控制模块11以及电池模块12。电池模块12提供一电能给第一基座磁力组件ma1、第二基
座磁力组件ma2、第三基座磁力组件ma3、第四基座磁力组件ma4以及控制模块11。
[0078]
请参阅图10,磁力调控模块13的第一磁力调控单元131包括一第一基座磁力组件ma1、一第二基座磁力组件ma2、一第三基座磁力组件ma3以及一第四基座磁力组件ma4,分别设置在坐垫基座10a的三个角落以及中间区域。三个角落的第一基座磁力组件ma1、第二基座磁力组件ma2以及第三基座磁力组件ma3呈一三角形方式设置。第四基座磁力组件ma4则是设置在坐垫基座10a的中间区域。
[0079]
磁力调控模块13的第二磁力调控单元132包括一第一坐垫磁力组件mb1、一第二坐垫磁力组件mb2、一第三坐垫磁力组件mb3、一第四坐垫磁力组件mb4、一第五坐垫磁力组件mb5、一第六坐垫磁力组件mb6、一第七坐垫磁力组件mb7、一第八坐垫磁力组件mb8、一第九坐垫磁力组件mb9以及一第十坐垫磁力组件mb10,分别设置在悬浮坐垫10b的周围以及中间区域。
[0080]
其中,第四坐垫磁力组件mb4设置在悬浮坐垫10b的中间区域。第一坐垫磁力组件mb1、第二坐垫磁力组件mb2、第三坐垫磁力组件mb3、第五坐垫磁力组件mb5、第六坐垫磁力组件mb6、第七坐垫磁力组件mb7、第八坐垫磁力组件mb8、第九坐垫磁力组件mb9以及第十坐垫磁力组件mb10则是分别设置在悬浮坐垫10b的周围。
[0081]
在本实施例中,坐垫基座10a包括一第一基座磁力组件(图未示)、一第二基座磁力组件(图未示)、一第三基座磁力组件(图未示)、一第四基座磁力组件(图未示)、一第五基座磁力组件(图未示)、一第六基座磁力组件(图未示)、一第七基座磁力组件(图未示)、一第八基座磁力组件(图未示)、一第九基座磁力组件(图未示)以及一第十基座磁力组件(图未示),分别设置在悬浮坐垫10b的周围以及中间区域。坐垫基座10a的各基座磁力组件(图未示)则是与悬浮坐垫10b的多个坐垫磁力组件对应设置。
[0082]
请参阅图11以及图12,图11是本技术第一实施例的悬浮坐垫的另一示意图。图12是本技术第一实施例的悬浮坐垫的另一示意图。图11以及图12分别是本技术的磁力调控模块13的不同实施方式。
[0083]
其中,图11是将中间区域的坐垫磁力组件设置成两个坐垫磁力组件mb4-1以及坐垫磁力组件mb4-2。
[0084]
图12则是将中间区域的坐垫磁力组件设置成三个坐垫磁力组件mb4-1、坐垫磁力组件mb4-2以及坐垫磁力组件mb4-3。
[0085]
在本实施例中,控制模块11可以分别调整多个磁力组件的磁力大小,以调整悬浮坐垫10b的前后倾斜角度或是左右倾斜角度。控制模块11可以通过传感器模块16的陀螺仪传感器或是多轴加速度传感器的感测信号以判断路况的上升或是下降,以调整坐垫基座10a与悬浮坐垫10b之间的距离与角度。
[0086]
也就是,控制模块11可以根据传感器模块16的一行驶状态信号,提供多个控制信号给坐垫基座10a的第一磁力调控单元131,以使坐垫基座10a以及悬浮坐垫10b之间具有一第一夹角θ1或是一第二夹角θ2。
[0087]
坐垫基座10a包括一前端以及一后端。悬浮坐垫10b包括一前端以及一后端。第一夹角θ1是设置在坐垫基座10a的后端以及悬浮坐垫10b的后端之间。第二夹角θ2则是设置在坐垫基座10a的前端以及悬浮坐垫10b的前端之间。
[0088]
传感器模块16的陀螺仪传感器或是加速度传感器,可以提供自行车1的行驶状态
rate)提供一逐渐减少的至少一电流给磁力调控模块的第一磁力调控单元,直至所述至少一电流减少到0为止(步骤s130)。
[0105]
在步骤s110中,第一电流默认值可以对应一第一磁力。第一回转率则是一低斜率的回转率,上升斜率平缓。
[0106]
在步骤s120中,电流区间则是对应一磁力区间。
[0107]
在步骤s130中,传感器模块16还包括一压力传感器或是重量传感器,以侦测悬浮坐垫10b上是否有一压力分布或是一重量值。第二回转率(2nd slew rate)则是一低斜率的下降回转率,下降斜率平缓。
[0108]
此外,请参阅图16,本实施例的悬浮坐垫的磁力调控方法还包括下列步骤:
[0109]
以一第一回转率(1st slew rate)提供一逐渐增加的多个电流给磁力调控模块的第一磁力调控单元,直至第一电流增加到一第一电流默认值为止(步骤s210)
[0110]
判断自行车的一行驶状态(步骤s220);
[0111]
当自行车的行驶状态在一平坦行驶状态时,则持续地调整多个第一电流介于一电流区间中(步骤s230);
[0112]
当自行车的行驶状态是一上坡状态时,则调整提供给磁力调控模块的第一磁力调控单元的多个第一电流,使悬浮坐垫的一前端与坐垫基座的一前端之间的一前端距离小于悬浮坐垫的一后端与坐垫基座的一后端之间的一后端距离(步骤s240);
[0113]
当自行车的行驶状态是一下坡状态时,则调整提供给磁力调控模块的第一磁力调控单元的多个第一电流,使悬浮坐垫的前端与坐垫基座的前端之间的前端距离大于悬浮坐垫的后端与坐垫基座的后端之间的后端距离(步骤s250);以及
[0114]
当自行车的行驶状态是一停止状态时,且悬浮坐垫上没有侦测到重量时,以一第二回转率提供逐渐减少的多个第二电流给磁力调控模块的所述第一磁力调控单元,直至多个第二电流减少到0为止(步骤s260)。
[0115]
在步骤s210中,第一电流默认值可以对应一第一磁力。第一回转率(1st slew rate)是一低斜率的回转率,上升斜率平缓。
[0116]
在步骤s220、步骤s230、步骤s240以及步骤s250中,控制模块11根据传感器模块16中的陀螺仪传感器或是多轴加速度传感器判断自行车1的行驶状态。自行车1的行驶状态包括一平坦行驶状态、一上坡状态、一下坡状态或是一停止状态。
[0117]
当自行车1的行驶状态是平坦行驶状态时,控制模块11会控制提供给磁力调控模块13的电流,持续在一电流区间中。
[0118]
在步骤s240以及步骤s250中,传感器模块16还包括一压力传感器,侦测悬浮坐垫上是否有压力分布。控制模块11根据传感器模块16中的压力传感器侦测悬浮坐垫上是否有重量。
[0119]
如图13所示坐垫基座10a与悬浮坐垫10b之间的夹角是一第一角度θ1。坐垫基座10a与悬浮坐垫10b的前端之间的排斥力较大,后端的排斥力则较小。第一角度θ1可以根据坐垫基座10a与悬浮坐垫10b的前后排斥力大小的调整而改变。
[0120]
当传感器模块16提供控制模块11的行驶状态信号是下坡信号时,悬浮坐垫10b的后端与坐垫基座10a的后端之间的后端距离dbb小于悬浮坐垫10b的前端与坐垫基座10a的前端之间的前端距离dff。
[0121]
如图14所示,坐垫基座10a与悬浮坐垫10b之间的夹角是一第二角度θ2。坐垫基座10a与悬浮坐垫10b的前端之间的排斥力较小,后端的排斥力则较大。第二角度θ2可以根据坐垫基座10a与悬浮坐垫10b的前后排斥力大小的调整而改变。
[0122]
也就是,当传感器模块16提供控制模块11的行驶状态信号是上坡信号时,悬浮坐垫10b的后端与坐垫基座10a的后端之间的一后端距离dbb大于悬浮坐垫10b的前端与坐垫基座10a的前端之间的一前端距离dff。
[0123]
在步骤s260中,当自行车1的行驶状态是一停止状态时,且悬浮坐垫上没有侦测到重量时,以一第二回转率(2
nd slew rate)提供逐渐减少的多个第二电流给磁力调控模块13的第一磁力调控单元131,直至多个第二电流减少到0为止,以使悬浮坐垫10b平缓的降回坐垫基座10a上。
[0124]
[实施例的有益效果]
[0125]
本技术的其中一有益效果在于,本技术所提供的具有悬浮坐垫的自行车以及磁力调控方法,可以有效控制悬浮坐垫,并且在自行车的不同行驶状态下提供舒适乘坐的体验。
[0126]
以上所提供的内容仅为本技术的可选可行实施例,并非因此局限本技术的申请专利范围,所以凡是运用本技术说明书及图式内容所做的等效技术变化,均包含于本技术的申请专利范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。