1.本公开涉及医疗机器人领域,尤其涉及一种用于尿道镜辅助机器人的主操作手。
背景技术:
2.在现代社会的进程中,机器人逐渐改变着人类的生产、生活方式,提高各行业的生产效率和产品质量,作为属于高端化、智能化医疗器械产品的手术机器人,能够以远程操作医疗系统执行手术,在辅助外科手术预防、诊断、治疗、康复等领域有独特优势,发展潜力巨大。手术机器人采用远程操作医疗系统与传统微创手术相结合,可允许外科医生间接地通过控制机械式手术机器人主操作手来完成手术操作,增加手术操作的精确度。
技术实现要素:
3.(一)要解决的技术问题
4.本公开提供了一种主操作手,以解决以上所提出的技术问题。
5.(二)技术方案
6.根据本公开的一个方面,提供了一种主操作手,包括:
7.第一轴座、第二轴座和第三轴座,所述第二轴座和所述第三轴座的回转轴相对于所述第一轴座的回转轴对称设置,且所述第一轴座、所述第二轴座和所述第三轴座的回转轴相交于中心点;
8.手柄,所述手柄第一端与第一轴座枢转连接;所述手柄绕所述中心点沿与所述第一轴座的回转轴方向相垂直的方向和所述第一轴座的回转轴方向转动;
9.拨片,与所述手柄二端枢转连接,所述拨片绕其回转轴在所述手柄上转动;
10.两个支链部,分别与所述第二轴座和所述第三轴座转动连接,且两个所述支链部分别与所述第二轴座和所述第三轴座同轴设置;
11.驱动装置,用于主动驱动或被动驱动所述手柄动作,所述手柄和所述拨片的动作控制所述尿道镜的运动。
12.在本公开的一些实施例中,所述支链部包括:
13.第一臂,所述第一臂第一端与所述第二轴座同轴连接;
14.第二臂,所述第一臂侧壁与所述第二臂第一端枢转连接,且所述第二臂的回转轴与所述第一臂的回转轴相垂直;
15.第三臂,所述第二臂第二端与所述第三臂第一端枢转连接;
16.第四臂,所述第三臂第二端通过第二十字轴与所述第四臂枢转连接,且所述第三臂的回转轴与所述第四臂的回转轴相垂直。
17.在本公开的一些实施例中,所述手柄包括:
18.支撑臂,所述支撑臂第一端与所述第一轴座枢转连接,且所述支撑臂的回转轴与所述第一轴座的回转轴方向相垂直;
19.连接座,所述支撑臂第二端与所述连接座第一端同轴连接;所述连接座通过支链
轴孔与所述支链部连接;
20.操作部,所述操作部第一端与所述连接座第二端同轴连接,所述操作部第二端与所述拨片枢转连接。
21.在本公开的一些实施例中,所述手柄还包括:
22.轴孔,与所述支撑臂的第一端连接,且所述轴孔的回转轴方向与所述支撑臂的回转轴方向相垂直;
23.第一十字轴,所述第一十字轴第一端与所述轴孔同轴连接,所述第一十字轴第二端与所述第一轴座同轴连接。
24.在本公开的一些实施例中,所述手柄和所述拨片的运动控制所述尿道镜的运动,包括:
25.所述手柄绕所述中心点沿所述第一轴座的回转轴方向转动,用于控制尿道镜沿镜身轴线的移动运动;
26.所述手柄绕所述中心点沿所述第一轴座的回转轴方向相垂直的方向转动,用于控制所述尿道镜绕镜身轴线的自转运动;
27.所述拨片绕其回转轴在所述手柄上转动,用于控制所述尿道镜镜身末端镜头的俯仰运动。
28.在本公开的一些实施例中,所述驱动装置被动驱动所述手柄动作,所述驱动装置分别安装于所述第二轴座和所述第三轴座处,用于驱动所述支链部中所述第一臂绕第二轴座或所述第三轴转动。
29.在本公开的一些实施例中,所述驱动装置被动驱动所述手柄动作,所述驱动装置安装于所述第二臂与所述第三臂枢转连接的位置,用于驱动所述支链部中所述第三臂绕所述第二臂转动。
30.在本公开的一些实施例中,所述驱动装置主动驱动所述手柄动作,所述驱动装置还用于检测所述手柄的运动输出参数。
31.在本公开的一些实施例中,还包括:
32.主手座,所述第一轴座、所述第二轴座和所述第三轴座均安装于所述主手座上。
33.(三)有益效果
34.从上述技术方案可以看出,本公开主操作手至少具有以下有益效果其中之一或其中一部分:
35.(1)本公开中主操作手的三自由度运动与尿道镜的三自由度一一对应,实现主操作手对尿道镜的运动的控制。
36.(2)本公开中设置两个虚约束支链部,为手柄提供更大的负载能力。
附图说明
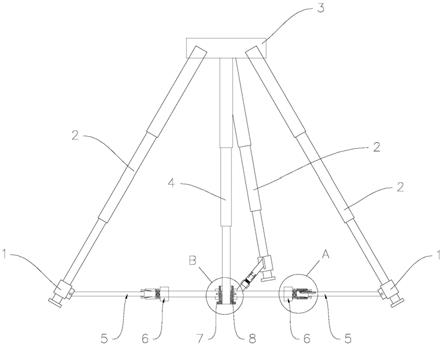
37.图1为本公开实施例主操作手的结构示意图。
38.图2为图1中第一轴座、第二轴座和第三轴座的回转轴交汇于中心点的示意图。
39.图3为本公开实施例主操作手的运动特性示意图。
40.图4和图5为尿道镜运动特性示意图。
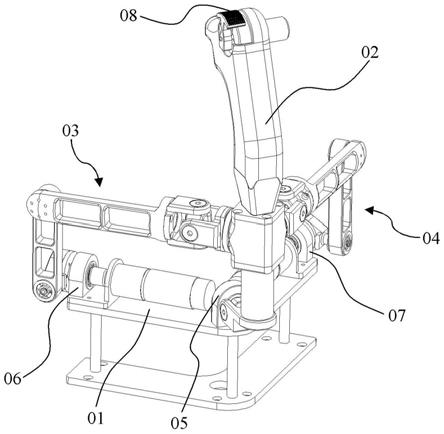
41.图6为图1中手柄局部示意图。
42.图7和图8为图1中支链部局部示意图。
具体实施方式
43.以下,将参照附图来描述本公开的实施例。但是应该理解,这些描述只是示例性的,而并非要限制本公开的范围。在下面的详细描述中,为便于解释,阐述了许多具体的细节以提供对本公开实施例的全面理解。然而,明显地,一个或多个实施例在没有这些具体细节的情况下也可以被实施。此外,在以下说明中,省略了对公知结构和技术的描述,以避免不必要地混淆本公开的概念。
44.在此使用的术语仅仅是为了描述具体实施例,而并非意在限制本公开。在此使用的术语“包括”、“包含”等表明了所述特征、步骤、操作和/或部件的存在,但是并不排除存在或添加一个或多个其他特征、步骤、操作或部件。
45.在此使用的所有术语(包括技术和科学术语)具有本领域技术人员通常所理解的含义,除非另外定义。应注意,这里使用的术语应解释为具有与本说明书的上下文相一致的含义,而不应以理想化或过于刻板的方式来解释。
46.在使用类似于“a、b和c等中至少一个”这样的表述的情况下,一般来说应该按照本领域技术人员通常理解该表述的含义来予以解释(例如,“具有a、b和c中至少一个的系统”应包括但不限于单独具有a、单独具有b、单独具有c、具有a和b、具有a和c、具有b和c、和/或具有a、b、c的系统等)。在使用类似于“a、b或c等中至少一个”这样的表述的情况下,一般来说应该按照本领域技术人员通常理解该表述的含义来予以解释(例如,“具有a、b或c中至少一个的系统”应包括但不限于单独具有a、单独具有b、单独具有c、具有a和b、具有a和c、具有b和c、和/或具有a、b、c的系统等)。
47.本公开提供了一种主操作手,包括:第一轴座、第二轴座、第三轴座、手柄、拨片、支链部和驱动装置;第二轴座和第三轴座的回转轴相对于第一轴座的回转轴对称设置,且第一轴座、第二轴座和第三轴座的回转轴相交于中心点;手柄一端与第一轴座枢转连接;手柄绕所述中心点沿与第一轴座的回转轴方向相垂直的方向和第一轴座的回转轴方向转动;拨片与手柄二端枢转连接,拨片绕其回转轴在手柄上转动;两个支链部分别与第二轴座和第三轴座转动连接,且两个支链部分别与第二轴座和第三轴座同轴设置;驱动装置用于主动驱动或被动驱动手柄动作,手柄和拨片的动作控制尿道镜的运动。
48.图1为本公开实施例用于尿道镜辅助机器人的主操作手的结构示意图。如图1所示,本公开的主操作手,包括:主手座01、手柄02、两个支链部等。其中,主手座01用于安装主操作手全部零部件,在其上方安装有三个轴座,分别是第一轴座05、第二轴座06、第三轴座07。
49.如图1所示,主手座为两层支撑平台结构,底面板通过支撑柱连接顶面板,所述第一轴座、所述第二轴座和所述第三轴座均固定安装于顶面板上。
50.本实施例中底面板和顶面板选用为平面结构。在其他实施例中也可以根据实际应用场景需求调整底面板和顶面板的结构,以能够实现装配要求即可,这里不再进行具体要求。
51.在其他实施例中主手座也可以为单层或两层以上的支撑平台结构,根据实际应用场景需要进行灵活调整,这里不再进行具体要求。
52.关于第一轴座05、第二轴座06、第三轴座07的在主手座上的布置方式,本实施例中选择第二轴座06和第三轴座07以第一轴座05的回转轴为对称轴对称设置,并且第一轴座、第二轴座和第三轴座的三个回转轴交于一中心点o,如图2所示。
53.图3为本公开实施例主操作手的运动特性示意图。如图3所示,手柄02在空间内具有二自由度,分别是如图3上坐标系所示的绕x轴的转动和绕y轴的转动,两转动运动耦合为手柄02绕中心点o的两自由度转动,即绕中心点o的四方向摆动(前、后、左、右)。拨片与手柄上方枢转连接,且拨片08绕其回转轴在手柄02上转动,实现主操作手的三自由度运动。
54.图4、图5所示为尿道镜运动特性示意图。如图4、图5所示,尿道镜具有三自由度运动,包括:绕尿道镜镜身轴线的自转运动r1、沿尿道镜镜身轴线的移动运动p、尿道镜镜身末端镜头的俯仰运动r2。主操作手的三自由度运动与尿道镜的三自由度一一对应,实现主操作手对尿道镜的运动的控制。
55.在一个具体实施例中,手柄02绕中心点o沿第一轴座05的回转轴方向(对应图中x轴)转动,对应图中手柄02绕中心点o的前后摆动,以实现主操作手控制尿道镜沿尿道镜镜身轴线的移动运动p。
56.在一个具体实施例中,手柄02绕中心点o沿第一轴座05的回转轴方向相垂直的方向(对应图中y轴)转动,对应图中手柄02绕中心点o的左右摆动,以实现主操作手控制尿道镜绕尿道镜镜身轴线的自转运动r1。
57.在一个具体实施例中,拨片08的转动,以实现主操作手控制尿道镜末端镜头的俯仰运动r2。
58.关于手柄02的具体结构,参考图6所示,手柄02下方固定安装有支撑臂09,在支撑臂09第一端设置有用于安装转轴的轴孔10,第一十字轴11的第一端a安装在轴孔10处,第一十字轴11的第二端b安装在第一轴座05的轴孔内,第一十字轴11可在轴孔10内转动。在手柄02的连接座上还设置有两个链轴孔,为了便于区分在图中表示为第一支链轴孔12和第二支链轴孔13,分别用于安装两个支链部,为便于区分两个支链部分别对应图中的第一支链部03和第二支链部04,第二支链部04与第一支链部03结构相同。操作部一端与连接座第二端同轴连接,操作部另一端与拨片08枢转连接。
59.图7和图8为图1中支链部局部示意图。如图7、图8所示,第一支链部03包括:第一臂14、第二臂15、第三臂16、第二十字轴17、第四臂18。第一臂14第一端与第二轴座06的轴孔连接,第一臂14可在第二轴座06上转动。第一臂14另一端(例如第二端侧壁)与第二臂15连接,第二臂15可在第一臂14上转动。第一臂14上设置的两转轴(分别为第一臂14与第二轴座06连接的转轴和第一臂14与第二臂15连接的转轴)相互垂直且交于一点。第二臂15另一端与第三臂16转动连接,第二臂15两端的转轴(分别为第二臂15与第一臂14连接的转轴和第二臂15与第三臂16连接的转轴)相互平行设置。第三臂16另一端通过第二十字轴17与第四臂18连接,第三臂16两端转轴(分别为第三臂16与第二臂15连接的转轴和第三臂16与第二十字轴17连接的转轴)相互垂直设置,第四臂18另一端与手柄02上的轴孔12连接,第四臂17可在手柄02上转动。
60.第二支链部04一端与第三轴座07连接,第二支链部04另一端与手柄02上的第二支链轴孔13连接,连接方式与第一支链部03相同。
61.对照图3,本公开提供的主操作手具有空间内二自由度。其中第一支链部03和第二
支链部04对手柄02本身的运动没有影响,两个支链部为虚约束支链,其目的在于为手柄02提供更大的负载能力。同时,本公开提供的支链部选用的并联机构具有确定运动所需活动度数为2,如图1所示主手座01上有三个用于支撑并联机构的支撑点位,即第一轴座05、第二轴座06、第三轴座07,可从中任选两个作为驱动电机或运动传感器的安装处。如去除两个支链部,仅有第一轴座05可用于安装驱动电机或传感器,安装空间有限,不利于实现手柄02的运动控制。
62.在本公开的一个实施例中,如图6所示,当手柄02作为被动运动构件时,可分别在第一支链部03和第二支链部04中选择两个构件作为主动件,如将两个驱动电机分别安装在第二轴座06和第三轴座07处,驱动支链部中第一臂13绕轴座的转动。
63.在本公开的另一个实施例中,如图7所示,提供了另一种驱动电机的安装位置。具体的,将两个驱动电机分别安装在两个支链部中的第二臂与第三臂铰接处,驱动支链部中第三臂16绕第二臂15的转动。
64.当手柄02为主动运动构件时,上文所述驱动电机替换为运动传感器,即可检测手柄02的运动输出参数。
65.以上对本公开的实施例进行了描述。但是,这些实施例仅仅是为了说明的目的,而并非为了限制本公开的范围。尽管在以上分别描述了各实施例,但是这并不意味着各个实施例中的措施不能有利地结合使用。本公开的范围由所附权利要求及其等同物限定。不脱离本公开的范围,本领域技术人员可以做出多种替代和修改,这些替代和修改都应落在本公开的范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。