1.本实用新型涉及工件转运装置,具体地,涉及一种玻璃板件无痕转运装置。
背景技术:
2.汽车智能化的步伐正在不断加快,汽车配置大屏、曲面屏、多屏正在逐步成为市场主流趋势。
3.因此,屏幕表面玻璃,即车载盖板玻璃市场未来可期,在车载盖板玻璃制造中,多个工序都对车载盖板玻璃转运都有严苛要求,如:印刷工序,喷涂ag工序,电子束蒸发镀膜工序,膜片贴合工序等,都要求车载盖板玻璃在转运过程中,不得在车载盖板玻璃表面产生异物和划刻伤。
4.但在现有的车载盖版玻璃制造技术中,无论是人工还是机械手转运,转运操作都会直接接触车载盖板玻璃表面,势必会造成车载盖板玻璃表面异物和划刻伤。
5.有鉴于此,需要设计一种玻璃板件无痕转运装置。
技术实现要素:
6.本实用新型第一方面所要解决的技术问题是提供一种玻璃板件无痕转运装置,其能够防止转运时在玻璃板件的表面形成划痕。
7.为了实现上述目的,本实用新型提供了一种玻璃板件无痕转运装置,包括抓取装置和转运装置,所述抓取装置包括第一横杆、第二横杆和滑杆,所述第一横杆和所述第二横杆上均连接有至少两个用于与玻璃板件的侧边相接触的夹爪,所述夹爪上与所述玻璃板件相接触的夹取部设有软质的膜片;所述第一横杆通过所述滑杆与所述第二横杆相连接,所述滑杆与所述第二横杆铰接,并能够通过角度调节组件实现所述滑杆与所述第二横杆之间的角度调节,以实现所述第一横杆和所述第二横杆与所述玻璃板件之间的夹紧与松开,所述抓取装置与所述转运装置相连接,以将所述玻璃板件自抓取定位装置转运至放置装置上。
8.具体地,所述夹爪与所述第一横杆以及所述第二横杆相连接的一端均设置有横杆滑块结构,以能够沿所述第一横杆和所述第二横杆的长度方向移动;所述横杆滑块结构与横杆滑块止动件相连接,并能够通过所述横杆滑块止动件实现该横杆滑块结构与所述第一横杆和所述第二横杆的定位。
9.进一步具体地,所述横杆滑块止动件为紧定螺钉,所述横杆滑块结构的一个侧壁上设有贯穿于该侧壁的横杆滑块紧定螺钉配合部,所述紧定螺钉与所述横杆滑块紧定螺钉配合部相配合,所述横杆滑块结构能够通过该紧定螺钉的调节实现与所述第一横杆和所述第二横杆的抵接定位以及移动调节。
10.优选地,所述夹取部设置为夹装杆,所述夹装杆垂直于所述抓取定位装置。
11.进一步优选地,所述膜片由电子辐射交联聚乙烯发泡材料成型,且所述膜片上设有防滑结构。
12.进一步优选地,所述第一横杆通过滑杆滑块结构与所述滑杆相连接,并能够沿所述滑杆的长度方向移动,以调节所述第一横杆与所述第二横杆之间的间距。
13.进一步优选地,所述滑杆滑块结构与滑杆止动件相连接,所述滑杆滑块结构能够通过所述滑杆止动件实现与所述滑杆的定位。
14.进一步优选地,所述滑杆止动件为所述紧定螺钉,所述滑杆滑块结构的一个侧壁上设有贯穿于该侧壁的滑杆滑块紧定螺钉配合部,所述紧定螺钉与所述滑杆滑块紧定螺钉配合部相配合,所述滑杆滑块结构能够通过该紧定螺钉的调节实现与所述第一横杆和所述第二横杆的抵接定位以及移动调节。
15.进一步优选地,所述角度调节组件包括承接件和弹性件,所述承接件与所述第二横杆相连接,所述滑杆通过与所述承接件间的铰接,实现与所述第二横杆铰接;所述弹性件连接于该承接件与所述滑杆之间。
16.具体地,所述抓取定位装置形成有定位腔以能够容置所述玻璃板件,所述定位腔的一对侧边上设有抓取限位结构,所述抓取限位结构形成有能够容纳所述夹爪的容纳腔;所述放置装置的一对侧边上设有放置限位结构,所述放置限位结构形成有能够容纳所述夹爪的容纳腔。
17.通过上述技术方案,本实用新型所提供的一种玻璃板件无痕转运装置,其中的抓取装置通过夹爪与玻璃板件的侧边相接触,从而以一种夹取的方式实现对玻璃板件的转运,从而实现了避免抓取装置与玻璃板件的表面的直接接触,因而能够保证不在玻璃板件的表面留下异物或是划痕,进而能够保证玻璃板件在后续工序中的加工质量;在夹爪上与玻璃板件相接触的一端设有软质的膜片,软质的膜片能够防止夹爪与玻璃板件之间的硬接触对玻璃板件的损伤;夹爪设置为能够沿横杆的长度方向移动,两横杆设置为通过滑杆相连接,且第一横杆能够沿滑杆的长度方向移动实现两横杆之间的间距调节,因此,该抓取装置能够实现沿横纵两个方向对夹爪的位置进行调节,从而能够适应不同规格的玻璃板件;抓取定位装置上形成有能够容纳玻璃板件的定位腔使得玻璃板件的位置相对固定,易于实现对玻璃板件的夹取;此外,该玻璃板件无痕转运装置整体结构简单,便于制造与维护成本低。
18.本实用新型的其它特征和优点将在随后的具体实施方式部分予以详细说明。
附图说明
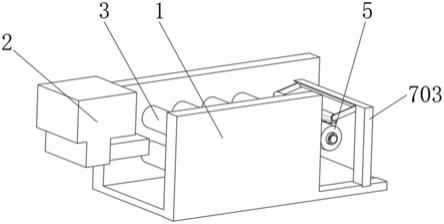
19.图1是本实用新型玻璃板件无痕转运装置的一个实施例的立体结构示意图;
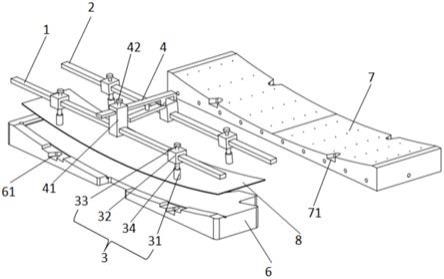
20.图2是本实用新型玻璃板件无痕转运装置的一个实施例中抓取装置部分部件的结构示意图;
21.图3是本实用新型玻璃板件无痕转运装置的一个实施例中抓取定位装置的结构示意图;
22.图4是本实用新型玻璃板件无痕转运装置的使用步骤流程图。
23.附图标记说明
24.1-第一横杆
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2-第二横杆
25.3-夹爪
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
31-膜片
26.32-横杆滑块结构
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
33-横杆滑块止动件
27.34-夹装杆
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
4-滑杆
28.41-滑杆滑块结构
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
42-滑杆止动件
29.5-角度调节组件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
51-承接件
30.52-弹性件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
6-抓取定位装置
31.61-抓取限位结构
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
7-放置装置
32.71-放置限位结构
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
8-玻璃板件
具体实施方式
33.下面结合附图对本实用新型的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本实用新型,并不用于限制本实用新型。
34.如图1所示,在本实用新型提供的玻璃板件无痕转运装置的一种实施例中,该无痕转运装置包括抓取装置和转运装置(图中未示出),其中抓取装置包括第一横杆1、第二横杆2和滑杆4,第一横杆1和第二横杆2上均连接有至少两个用于与玻璃板件8的侧边相接触的夹爪3,夹爪3上与玻璃板件8相接触的夹取部设有软质的膜片31;第一横杆1通过滑杆4与第二横杆2相连接,滑杆4与第二横杆2铰接,并能够通过角度调节组件5实现滑杆4与第二横杆2之间的角度调节,以实现第一横杆1和第二横杆2与玻璃板件8之间的夹紧与松开,抓取装置与所述转运装置相连接,以将玻璃板件8自抓取定位装置6转运至放置装置7上。其中,每个横杆上的夹爪3可优选设置为两个,以保证夹取的稳定性,且四个夹爪3优选为对称设置,以形成一个矩形的点阵,从而能够使得在夹取玻璃板件8的时候,在玻璃板件8的长度方向上不会产生弯曲扭矩,能够避免长度较大的玻璃板件8发生长度方向上的弯曲形变;转运装置可以是轨道输送装置,优选为手臂机器人。
35.本实用新型所提供的一种玻璃板件无痕转运装置,其中的抓取装置通过夹爪3的夹取部与玻璃板件8的侧边相接触,从而以一种夹取的方式实现对玻璃板件8的转运,实现了避免抓取装置与玻璃板件8的表面的直接接触,因而能够保证不在玻璃板件8的表面留下异物或是划痕,进而能够保证玻璃板件8在后续工序中的加工质量;在夹取部处设有软质的膜片31,软质的膜片31能够防止夹爪3与玻璃板件8之间的硬接触对玻璃板件8的损伤;此外,该玻璃板件无痕转运装置整体结构简单,便于制造与维护成本低。
36.具体地,如图1和图2所示,在本实用新型提供的玻璃板件无痕转运装置的一种实施例中,夹爪3与第一横杆1以及第二横杆2相连接的一端均设置有横杆滑块结构32,以能够沿第一横杆1和第二横杆2的长度方向移动,且横杆滑块结构32与横杆滑块止动件33相连接,并能够通过横杆滑块止动件33实现该横杆滑块结构32与第一横杆1和第二横杆2的定位;同时,第一横杆1通过滑杆滑块结构41与滑杆4相连接,并能够沿滑杆4的长度方向移动,以调节第一横杆1与第二横杆2之间的间距,滑杆滑块结构41与滑杆止动件42相连接,滑杆滑块结构41能够通过滑杆止动件42实现与滑杆4的定位。该设计使得抓取装置能够实现沿横纵两个方向对夹爪3的位置进行调节,从而能够适应不同规格的玻璃板件8;夹爪3通过横杆滑块止动件33实现在横杆上的定位,第一横杆1通过滑杆止动件42实现在滑杆4上的定位,从而能够实现各个夹爪3之间相对位置的固定,进而能够保证抓取装置在抓取并转运玻璃板件8的时候,玻璃板件8不会发生滑动或是脱落,保证了玻璃板件8转运过程的可靠性与安全性。
37.如图2所示,在本实用新型提供的玻璃板件无痕转运装置的一种实施例中,横杆滑块止动件33可优选为紧定螺钉,横杆滑块结构32的一个侧壁(优选为上侧壁)上设有贯穿于该侧壁的横杆滑块紧定螺钉配合部,该横杆滑块紧定螺钉配合部具体设置为螺纹孔结构,使得紧定螺钉与横杆滑块紧定螺钉配合部能够以螺接的方式相配合,从而在紧定螺钉松开时,横杆滑块结构32能够在横杆上实现位置的无极移动调节,即是实现夹爪3在横杆上位置的无极移动调节;在紧定螺钉拧紧时,横杆滑块结构32能够抵接定位在横杆上,以实现夹爪3的固定。同样地,滑杆止动件42也可优选设置为紧定螺钉,滑杆滑块结构41的一个侧壁(优选为上侧壁)上设有贯穿于该侧壁的滑杆滑块紧定螺钉配合部,该滑杆滑块紧定螺钉配合部具体设置为螺纹孔结构,使得紧定螺钉与滑杆滑块紧定螺钉配合部能够以螺接的方式相配合,从而在紧定螺钉松开时,滑杆滑块结构41能够在滑杆4上实现位置的无极移动调节,即是能够实现第一横杆1和第二横杆2之间间距的无极调节;在紧定螺钉拧紧时,滑杆滑块结构41能够抵接定位在滑杆4上,以实现第一横杆1的抵接定位,即是能够实现第一横杆1和第二横杆2之间间距的固定。
38.当然,可以理解的是,在本实用新型提供的玻璃板件无痕转运装置的一种实施例中,横杆滑块止动件33以及滑杆止动件42还可以优选设置为弹簧卡爪,具体地,可将第一横杆1、第二横杆2和滑杆4的一个侧面上设置齿条结构,以在将弹簧卡爪上提,使得卡爪从齿条的齿槽中抽离时,横杆滑块结构32能够在横杆上实现位置的移动调节,即是夹爪3能够在横杆上实现位置的移动调节;在松开弹簧卡爪使得卡爪通过弹簧的弹力进入并卡止在齿条的齿槽中时,能够实现横杆滑块结构32在横杆上的位置固定,即是实现夹爪3在横杆上的位置固定。同样地,在将弹簧卡爪上提,使得卡爪从齿条的齿槽中抽离时,滑杆滑块结构41能够在滑杆4上实现位置的移动调节,即是第一横杆1能够在滑杆4上实现位置的移动调节;在松开弹簧卡爪使得卡爪通过弹簧的弹力进入并卡止在齿条的齿槽中时,能够实现滑杆滑块结构41在滑杆4上的位置固定,即是实现第一横杆1在滑杆4上的位置固定。将横杆滑块止动件33以及滑杆止动件42优选设置为弹簧卡爪,能够方便夹爪3的位置调节以及第一横杆1和第二横杆2之间间距的调节。
39.如图2所示,在本实用新型提供的玻璃板件无痕转运装置的一种实施例中,夹爪3上与玻璃板件8相接触的夹取部设置为夹装杆34,且该夹装杆34垂直于抓取定位装置6。具体地,如图3所示,抓取定位装置6上形成有能够容置玻璃板件8的定位腔,定位腔水平设置使得玻璃板件8水平放置在定位腔中,因此,将夹取部设置为夹装杆34,且夹装杆34垂直于抓取定位装置6设计,能够使得夹装杆34与是通过夹装杆34的侧壁以近似点接触的方式与玻璃板件8相接触,能够使得夹取更加稳定牢固;夹爪3可优选采用聚醚醚酮树脂注塑成型,采用质地较软的树脂材料能够使得夹爪3不易在玻璃板件8上产生划痕,且夹装杆34上可基于玻璃板件8的侧边的形状结构开设卡槽,以使得抓取装置在抓取玻璃板件8时,玻璃板件8的侧边能够卡入夹装杆34上开设的卡槽中,以防止脱落,从而能够保证抓取的可靠性;更优选地,在夹装杆34上设有软质的膜片31,该膜片31优选采用例如电子辐射交联聚乙烯发泡材料等与玻璃接触后不会留下痕迹的材料制成,且在该膜片31上还可以设置例如凸点、凹槽等防滑结构,以保证抓取的可靠性。
40.如图2所示,在本实用新型提供的玻璃板件无痕转运装置的一种实施例中,角度调节组件5包括承接件51和弹性件52,承接件51与第二横杆2相连接,滑杆4通过与承接件51间
的铰接,实现与第二横杆2的铰接;弹性件52连接于该承接件51与滑杆4之间,在弹性件52收缩时,会使得承接件51与滑杆4之间的夹角减小,从而使得第一横杆1和第二横杆2之间的间距减小,以实现对玻璃板件8的夹取;在弹性件52伸展时,会使得承接件51与滑杆4之间的夹角增大,从而使得第一横杆1和第二横杆2之间的间距增大,以松开玻璃板件8,实现放置;此外,角度调节组件5结构简单,易于制造,能够极大地降低抓取装置的自重,从而能够减少转运装置在转运玻璃板件8的过程中的能耗。
41.如图1和图3所示,在本实用新型提供的玻璃板件无痕转运装置的一种实施例中,抓取定位装置6的定位腔的一对侧边上设有抓取限位结构61,抓取限位结构61形成有能够容纳夹爪3的容纳腔,且容纳腔优选设置为能够侵入到定位腔的侧边部分,从而能够方便夹爪3夹取玻璃板件8;同样地,在放置装置7的一对侧边上设有放置限位结构71,放置限位结构71形成有能够容纳夹爪3的容纳腔,以能够在抓取装置将玻璃板件8放置在放置装置7上时,夹爪3能够伸入到放置限位结构71形成的容纳腔中,从而使得玻璃板件8在与放置装置7相接触时抓取装置才松开,完成玻璃板件8的放置,因此,能够保证玻璃板件8与放置装置之间不会产生碰撞,确保玻璃板件8上不会产生划痕或是撞击裂纹,使得放置的步骤更加稳定可靠。
42.下面将结合上述技术方案中的玻璃板件无痕转运装置,描述本实用新型玻璃板件无痕转运装置的具体使用步骤及注意事项:
43.首先,作业人员将玻璃板件8放置于抓取定位装置6的定位腔内,需要注意的是,若是作业人员手动搬运,则作业人员需要穿戴覆有膜片的手套;若是自动化搬运的话需要保证机械手上也覆有膜片,以防止在玻璃板件8上产生痕迹。
44.随后,作业人员通过调整转运装置调节抓取装置的高度,并根据玻璃板件8的实际大小,调节第一横杆1与第二横杆2之间的间距以及各横杆上夹爪3之间的间距,以保证抓取装置能够抓取玻璃板件8,完成初步定位。
45.然后,通过控制角度调节组件5抓取玻璃板件8,并通过控制转运装置将玻璃板件8转运至放置装置7上方,再通过调整转运装置调节抓取装置的左右位置及高度,使得玻璃板件8与放置装置7接触,并通过控制角度调节组件5放下玻璃板件8,完成转运过程。
46.最后,将上述的调整转运装置的动作录入调整转运装置的程序中,开始自动化作业。
47.以上结合附图详细描述了本实用新型的优选实施方式,但是,本实用新型并不限于此。在本实用新型的技术构思范围内,可以对本实用新型的技术方案进行多种简单变型,包括各个具体技术特征以任何合适的方式进行组合。为了避免不必要的重复,本实用新型对各种可能的组合方式不再另行说明。但这些简单变型和组合同样应当视为本实用新型所公开的内容,均属于本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。