1.本发明涉及医疗器械技术领域,尤其涉及一种柔性剪切装置及其使用方法。
背景技术:
2.在人体组织介入修复领域,尤其是心脏瓣膜修复领域,有些植入器械带有线、细杆结构,手术过程中完成特定操作后,需要在介入条件下,对多余的线、细杆结构进行剪除操作。由于经血管介入等环境的空间限制,因此要求提供剪除操作的器械尺寸非常小。目前虽然刚性杆驱动的器械结构能够应对微创手术的医疗元件的剪除工作,但对于长距离的血管介入手术等环境,目前的刚性器械无法完成元件的剪除。因此,急需一种新的器械以解决上述问题。
技术实现要素:
3.为克服上述问题,本发明提供一种柔性剪切装置及其使用方法。其采用柔性连接方式能够适用于复杂的人体组织结构,克服现有的刚性器械的缺点,在完成剪切任务的情况下并改善剪切质量。采用杠杆原理,使剪切过程省力,减小柔性连接机构变形量,提高操作的同步性。合理设置刀口位置能够缩短余线长度。采用剪切原理而非挤压原理,能够保护刀口,改善对韧性材料的剪切效果,提高器械使用寿命。
4.为实现上述目的,根据本发明实施例的一个方面,提供了一种柔性剪切装置,包括:执行机构,其介入人体组织以剪切医疗元件;操作机构,其用于控制执行机构运动以使执行机构在剪切状态和非剪切状态之间切换;还包括柔性连接机构,所述的柔性连接机构一端与所述的执行机构连接,另一端与所述的操作机构连接,操作机构的控制动作通过所述的柔性连接机构传递至执行机构,以控制执行机构的执行状态。
5.可选的,所述执行机构包括下刀、上刀和基座;所述下刀固定连接在基座的一端,下刀的顶面设置有转轴;上刀通过所述转轴与下刀枢接,柔性连接机构与上刀一端连接,所述操作机构通过柔性连接机构控制上刀沿所述转轴转动以控制执行机构的执行状态。
6.可选的,上刀和下刀分别设置有过线孔,所述的医疗元件穿过所述过线孔后位于上刀的上刀刃口和下刀的下刀刃口之间;剪切医疗元件时,医疗元件与上刀刃口之间的接触点至所述转轴的力臂长度为c1;柔性连接机构和上刀一端之间的连接点至所述转轴的力臂长度为c2;所述的c1小于c2。
7.可选的,所述的下刀上设置有避让槽,用于在剪切过程中容纳医疗元件和上刀刃
口;上刀刃口与下刀刃口错位闭合,剪切医疗元件时,通过上刀刃口与下刀刃口的错位闭合使医疗元件断裂。
8.可选的,上刀刃口与下刀刃口闭合时,上刀刃口与下刀上的过线孔所在端面之间的距离小或等于医疗元件的直径。
9.可选的,所述柔性连接机构包括柔性同步管和柔性鞘管;柔性同步管安装于柔性鞘管内,且可在柔性鞘管内移动;所述柔性同步管一端与执行机构连接,另一端与操作机构连接,以使操作机构通过柔性同步管而同步控制执行机构,进而控制执行机构的执行状态;柔性鞘管一端与执行机构连接,另一端与操作机构连接,并为柔性同步管提供支撑。
10.可选的,所述柔性连接机构包括柔性同步管和柔性鞘管;柔性同步管安装于柔性鞘管内,且可在柔性鞘管内移动;所述柔性同步管一端与上刀的牵拉臂连接,另一端与操作机构连接,以使操作机构通过拉动柔性同步管以控制上刀转动,进而控制执行机构的执行状态;柔性鞘管一端与基座上远离下刀的端部连接,另一端与操作机构连接,并为柔性同步管提供支撑。
11.可选的,所述操作机构包括壳体,壳体的左右两侧设置有滑槽;壳体内还安装有前座、后座和手柄机构;所述前座固定安装于壳体内,前座靠近执行机构的一端与柔性鞘管连接;所述后座设置于壳体内,柔性同步管穿过前座的轴向内孔后与后座的一端连接,后座的另一端与手柄机构连接;所述后座可沿壳体的左右两侧设置的滑槽滑动,手柄机构带动后座沿滑槽往复运动以控制柔性同步管前后移动。
12.可选的,所述手柄机构包括连杆、扳手和拉簧;所述扳手转动连接在壳体上,扳手位于壳体内的部分的一侧与拉簧连接,拉簧的另一端固定在壳体内,拉簧用于控制手柄机构复位;扳手位于壳体内的部分的另一侧与连杆的一端连接,连杆的另一端与后座上远离执行机构的端部连接。
13.可选的,扳手上外力作用点与扳手和壳体的转动连接点之间的力臂长度为l1,连杆与扳手和壳体的转动连接点之间的力臂长度为l2,l1大于l2。
14.根据本发明实施例的第二方面,提供一种柔性剪切装置的使用方法,包括:执行机构,其介入人体组织以剪切医疗元件;操作机构,其用于控制执行机构运动以使执行机构在剪切状态和非剪切状态之间切换;还包括柔性连接机构,所述的柔性连接机构一端与所述的执行机构连接,另一端与所述的操作机构连接;剪切时,操作机构的控制动作通过所述的柔性连接机构传递至执行机构,以控制执行机构的执行状态。
15.可选的,所述使用方法中所述执行机构包括下刀、上刀和基座;
所述下刀固定连接在基座的一端,下刀的顶面设置有转轴;上刀通过所述转轴与下刀枢接,柔性连接机构与上刀一端连接,所述操作机构通过柔性连接机构控制上刀沿所述转轴转动以控制执行机构的执行状态。
16.可选的,所述使用方法中上刀和下刀分别设置有过线孔,所述的医疗元件穿过所述过线孔后位于上刀的上刀刃口和下刀的下刀刃口之间;剪切医疗元件时,医疗元件与上刀刃口之间的接触点至所述转轴的力臂长度为c1;柔性连接机构和上刀一端之间的连接点至所述转轴的力臂长度为c2;所述的c1小于c2,以减小剪切操作力。
17.可选的,所述使用方法中所述的下刀上设置有避让槽,用于在剪切过程中容纳医疗元件和上刀刃口;上刀刃口与下刀刃口错位闭合,剪切医疗元件时,通过上刀刃口与下刀刃口的错位闭合使医疗元件断裂,并使待移出人体组织的部分医疗元件和上刀刃口进入避让槽。
18.可选的,所述使用方法中上刀刃口与下刀刃口闭合时,上刀刃口与下刀上的过线孔所在端面之间的距离小或等于医疗元件的直径。
19.可选的,所述使用方法中所述柔性连接机构包括柔性同步管和柔性鞘管;柔性同步管安装于柔性鞘管内,且可在柔性鞘管内移动;所述柔性同步管一端与执行机构连接,另一端与操作机构连接,以使操作机构通过柔性同步管而同步控制执行机构,进而控制执行机构的执行状态;柔性鞘管一端与执行机构连接,另一端与操作机构连接,并为柔性同步管提供支撑。
20.可选的,所述使用方法中所述柔性连接机构包括柔性同步管和柔性鞘管;柔性同步管安装于柔性鞘管内,且可在柔性鞘管内移动;所述柔性同步管一端与上刀的牵拉臂连接,另一端与操作机构连接,以使操作机构通过拉动柔性同步管以控制上刀转动,进而控制执行机构的执行状态;柔性鞘管一端与基座上远离下刀的端部连接,另一端与操作机构连接,并为柔性同步管提供支撑。
21.可选的,所述使用方法中所述操作机构包括壳体,壳体的左右两侧设置有滑槽;壳体内还安装有前座、后座和手柄机构;所述前座固定安装于壳体内,前座靠近执行机构的一端与柔性鞘管连接;所述后座设置于壳体内,柔性同步管穿过前座的轴向内孔后与后座的一端连接,后座的另一端与手柄机构连接;所述后座可沿壳体的左右两侧设置的滑槽滑动;使用时,手柄机构带动后座沿滑槽往复运动以控制柔性同步管前后移动,以控制执行机构的工作状态。
22.可选的,所述使用方法中所述手柄机构包括连杆、扳手和拉簧;所述扳手转动连接在壳体上,扳手位于壳体内的部分的一侧与拉簧连接,拉簧的另一端固定在壳体内,拉簧用于控制手柄机构复位;扳手位于壳体内的部分的另一侧与连杆的一端连接,连杆的另一端与后座上远离执行机构的端部连接。
23.可选的,所述使用方法中扳手上外力作用点与扳手和壳体的转动连接点之间的力
臂长度为l1,连杆与扳手和壳体的转动连接点之间的力臂长度为l2,l1大于l2,以减小剪切操作力。
24.本发明的技术方案具有如下优点或有益效果:(1)采用柔性连接机构连接执行机构和操作机构能够使剪切装置适用于复杂的人体组织结构,诸如介入血管内实现剪切目的,并且可适用于长距离的剪切操作,克服现有的刚性器械的缺点。同时可根据需要选择合适尺寸的柔性连接元件以适用于不同的手术环境。
25.(2)剪切驱动力臂的长度大于医疗元件对上刀的反作用力的力臂,采用杠杆原理,从而降低驱动力,使剪切操作更为容易。进而也降低了驱动力对柔性连接机构的作用力,避免柔性机构过度变形而影响操作效果,提高了操作机构与执行机构的动作同步性。
26.(3)上刀刃口与下刀刃口错位闭合,相对于挤压断裂的方式能够降低剪切过程所需的驱动力,并降低刀具的磨损量,提高使用寿命,且剪切稳定可靠。
27.(4)操作机构采用杠杆原理拉动柔性同步管,从而降低驱动力,也降低对柔性鞘管的作用力。使操作方便,并减小柔性鞘管的变形量。
28.(5)执行机构和操作机构均采用杠杆原理,双重杠杆的使用可进一步降低驱动外力,进一步减小鞘管的变形量,提高了操作机构操作动作的同步精度,提高剪切效果。
29.(6)控制上刀刃口的设置位置能够减小余线的长度,提高剪切质量。
附图说明
30.附图用于更好地理解本发明,不构成对本发明的不当限定。其中:图1是根据本发明实施例的剪切装置的主体结构示意图;图2是根据本发明实施例的执行机构的示意图;图3是根据本发明实施例的执行机构剪切状态的剖视示意图;图4是根据本发明实施例的执行机构剖视示意图;图5是根据本发明实施例的挤压断裂原理示意图;图6是根据本发明实施例的剪切断裂原理示意图;图7是根据本发明实施例的操作机构爆炸示意图;图8是根据本发明实施例的操作机构剖视示意图。
具体实施方式
31.以下结合附图对本发明的示范性实施例做出说明,其中包括本发明实施例的各种细节以助于理解,应当将它们认为仅仅是示范性的。因此,本领域普通技术人员应当认识到,可以对这里描述的实施例做出各种改变和修改,而不会背离本发明的范围和精神。同样,为了清楚和简明,以下的描述中省略了对公知功能和结构的描述。
32.根据本发明实施例的一个方面,提供了一种柔性剪切装置。
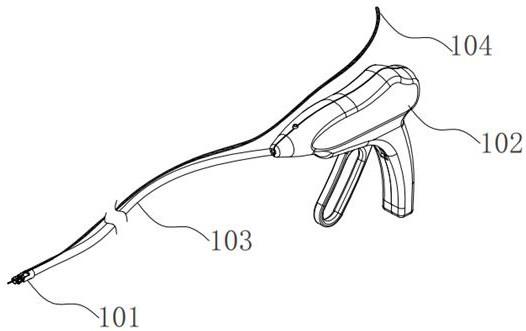
33.为了解决现有技术中的刚性微创术手术器械无法长距离剪除医疗元件的问题,诸如对通过血管植入心脏的器械的部分元件的剪除,本发明的一实施例提供一种柔性剪切装置。此处提及的医疗元件包括但不限于线或细杆等元件。具体的,如图1所示,所述的柔性剪
切装置包括执行机构101,其介入人体组织以剪切医疗元件;操作机构102,其用于控制执行机构运动以使执行机构在剪切状态和非剪切状态之间切换。操作机构可包括扳手等机构以方便医护人员手动操作执行机构。还包括柔性连接机构103,所述的柔性连接机构一端与所述的执行机构连接,另一端与所述的操作机构连接。所述的柔性连接机构的长度和直径可根据介入组织的空间进行调整,即可采用模块化设计思路,使本发明的剪切装置能够适用于多种手术环境。操作机构的控制动作通过所述的柔性连接机构传递至执行机构,以控制执行机构的执行状态,诸如在剪切状态和非剪切状态之间切换。
34.可选的,所述执行机构101包括下刀201、上刀204和基座203。如图2所示,所述下刀201固定连接在基座203的左端,即远离医护人员的一端。下刀201的顶面设置有转轴202。如图2所示的一个实施例中,所示的转轴设置在下刀顶面的靠近中部的位置。上刀通过所述转轴与下刀枢接,柔性连接机构与上刀一端连接,所述操作机构通过柔性连接机构控制上刀沿所述转轴转动以控制执行机构的执行状态。
35.可选的,如图3和4所示,上刀和下刀分别设置有过线孔401、402,所述的医疗元件104穿过所述过线孔后位于上刀的上刀刃口403和下刀的下刀刃口403之间。图4所示的虚线是上刀上的刃口绕转轴的运动轨迹,上刀刃口可以实现与下刀刃口的错位闭合,其闭合间隙足够小,从而提高端口的剪切质量。当需要剪切医疗元件时,医疗元件与上刀刃口之间的接触点至所述转轴的力臂长度为c1;柔性连接机构和上刀一端之间的连接点至所述转轴的力臂长度为c2;所述的c1小于c2。如图4所示的某一剪切状态,医疗元件与上刀刃口之间的接触点至所述转轴的力臂长度为c;柔性连接机构和上刀一端之间的连接点至所述转轴的力臂长度为d;所述的d大于c,即剪切驱动力臂的长度大于医疗元件对上刀的反作用力的力臂,采用杠杆原理,从而降低驱动力,使剪切操作更为容易。此方式由于降低了驱动力,进而也降低了驱动力对柔性连接机构的力,避免柔性机构过度变形而影响操作效果。
36.可选的,如图4所示,所述的下刀上设置有避让槽405,用于在剪切过程中容纳医疗元件和上刀刃口。一个实施例中,本发明的上刀刃口与下刀刃口采用错位闭合的方式实现剪切。即剪切医疗元件时,通过上刀刃口与下刀刃口的错位闭合使医疗元件断裂。该方式相对于挤压断裂的方式能够降低剪切过程所需的驱动力,并降低刀具的磨损量,提高使用寿命。实践中,剪切是在一对相距很近、大小相同、指向相反的横向外力(即垂直于作用面的力)作用下,材料的横截面沿该外力作用方向发生的相对错动变形现象。能够使材料产生剪切变形的力称为剪力或剪切力。发生剪切变形的截面称为剪切面。判断是否“剪切”的关键是材料的横截面是否发生相对错动。如图5所示为挤压断线原理示意图,其中刃口501挤压材料502到支撑板503上,通过控制刃口501前进以至断线。挤压方式断裂材料的局限在于:(1)所需要的挤压力较大,(2)刃口锥角较小以提高压强,导致刃口磨损量大,寿命短,(3)需要为被切割材料提供足够大的支撑结构,导致操作器械体积较大。而本发明采用图6所示的剪切断线原理,其中刃口601和602错位f距离分布在线材两侧,通过剪切作用完成断线,对于较为硬质的线材具有断线稳定可靠的优点。并且,图6所示的刃口可以采用其它形状,而非像挤压断裂的方式优选采用楔形结构,从而降低了刃口受到的压强,提高使用寿命。再者,本发明的剪切原理能够保护刀口,也能够改善对韧性材料的剪切效果。
37.可选的,上刀刃口与下刀刃口闭合时,上刀刃口与下刀上的过线孔所在端面之间的距离小或等于医疗元件的直径。实践中,剪断后的余线长度是评估剪切装置性能的重要
指标。如图4所示,本发明的一个实施例通过合理控制上刀刃口与下刀上的过线孔所在端面之间的距离,即图4所示的距离e,从而缩短余线长度。使用中,可以根据需要设计尺寸e,本发明的一个优选实施例选择使所述距离小或等于医疗元件的直径。当然也可以采用其它尺寸。根据前文描述的剪切原理,本发明的方案能够实现稳定、可靠的剪切操作,通过设计验证,本发明的余线长度可以做到0.5mm。
38.可选的,如图1和3所示,所述柔性连接机构包括柔性同步管301和柔性鞘管302;柔性同步管安装于柔性鞘管内,且在操作机构的控制下在柔性鞘管内移动。优选的,本发明的柔性同步管具有良好的抗拉性能,能够1:1的同步传递操作机构的动作。所述柔性同步管一端与执行机构连接,另一端与操作机构连接,以使操作机构通过拉动柔性同步管而同步控制执行机构,进而执行机构的执行状态在剪切或非剪切之间切换。柔性鞘管一端与执行机构连接,另一端与操作机构连接,并为柔性同步管提供支撑。实践中,柔性鞘管不仅要具有良好的柔性,以便能够适用于复杂的人体组织环境,诸如人体血管环境。同时,柔性鞘管也需要具有足够的抗压性能,避免柔性同步管运动时产生的外力导致柔性鞘管过度变形而无法同步传输操作机构的动作,影响剪切效果。
39.可选的,如图3和4所示,所述柔性连接机构包括柔性同步管和柔性鞘管;柔性同步管安装于柔性鞘管内,且可在柔性鞘管内移动;所述柔性同步管一端与上刀的牵拉臂406连接,另一端与操作机构连接,以使操作机构通过拉动柔性同步管,使柔性同步管在所述鞘管内移动,进而拉动所述的牵拉臂使上刀转动,使执行机构在剪切和非剪切状态之前切换。柔性鞘管一端与基座上远离下刀的端部连接,另一端与操作机构连接,并为柔性同步管提供支撑。
40.可选的,如图7所示,所述操作机构包括壳体701,壳体可采用分体设置以方便制造和装配。壳体的左右两侧设置有滑槽702,具体的所述滑槽可设置在左右分体设置的壳体上。壳体内还安装有前座703、后座704和手柄机构;所述前座固定安装于壳体内,前座靠近执行机构的一端与柔性鞘管连接(参见图8);所述后座设置于壳体内,柔性同步管穿过前座的轴向内孔后与后座的一端连接,后座的另一端与手柄机构连接;所述后座可沿壳体的左右两侧设置的滑槽滑动,手柄机构带动后座沿滑槽往复运动以控制柔性同步管前后移动,从而拉动执行机构处于剪切或非剪切状态,诸如控制上刀与下刀错位闭合,或者使上刀远离下刀。
41.可选的,如图7和8所示,所述手柄机构包括连杆705、扳手706和拉簧707。所述扳手转动连接在壳体上,一个实施例中所述的转动连接点位于壳体的顶部。扳手706位于壳体内的部分的一侧与拉簧连接,可选的,可在扳手上设置挂钩,拉簧挂接在所述挂钩上。拉簧的另一端固定在壳体内,拉簧处于拉伸状态,始终向扳手提供恢复力,用于控制手柄机构复位。扳手位于壳体内的部分的另一侧与连杆的一端连接。图7所示的实施例中采用在连杆的端部设置凹槽,使扳手转动安装于所述凹槽内。连杆的另一端与后座上远离执行机构的端部连接。图7所示的实施例中采用在连杆的另一端部也设置凹槽,使后座转动安装于所述凹槽内。
42.可选的,扳手上外力作用点与扳手和壳体的转动连接点之间的力臂长度为l1,连杆与扳手和壳体的转动连接点之间的力臂长度为l2,l1大于l2。如图8所示通过简化受力状态以阐述本发明的工作原理。在某个剪切状态下,扳手上外力作用点与扳手和壳体的转动
连接点之间的力臂长度为a,连杆与扳手和壳体的转动连接点之间的力臂长度为b,a大于b,即采用杠杆原理拉动柔性同步管,从而降低驱动力,也降低对柔性鞘管的作用力。使操作方便,并减小柔性鞘管的变形量。此外,该杠杆结构与前文描述的杠杆结构配合,可进一步降低驱动外力,进一步减小鞘管的变形量,提高了操作机构操作动作的同步精度,提高剪切效果。
43.根据本发明实施例的第二方面,提供一种柔性剪切装置的使用方法,包括:执行机构,其介入人体组织以剪切医疗元件;操作机构,其用于控制执行机构运动以使执行机构在剪切状态和非剪切状态之间切换;还包括柔性连接机构,所述的柔性连接机构一端与所述的执行机构连接,另一端与所述的操作机构连接;剪切操作时,操作机构的控制动作通过所述的柔性连接机构传递至执行机构,以控制执行机构的执行状态。
44.可选的,所述使用方法中所述执行机构包括下刀、上刀和基座;所述下刀固定连接在基座的一端,下刀的顶面设置有转轴;上刀通过所述转轴与下刀枢接,柔性连接机构与上刀一端连接,所述操作机构通过柔性连接机构控制上刀沿所述转轴转动以控制执行机构的执行状态。
45.可选的,所述使用方法中上刀和下刀分别设置有过线孔,所述的医疗元件穿过所述过线孔后位于上刀的上刀刃口和下刀的下刀刃口之间;剪切医疗元件时,医疗元件与上刀刃口之间的接触点至所述转轴的力臂长度为c1;柔性连接机构和上刀一端之间的连接点至所述转轴的力臂长度为c2;所述的c1小于c2,以减小剪切操作力。
46.可选的,所述使用方法中所述的下刀上设置有避让槽,用于在剪切过程中容纳医疗元件和上刀刃口;上刀刃口与下刀刃口错位闭合,剪切医疗元件时,通过上刀刃口与下刀刃口的错位闭合使医疗元件断裂,并使待移出人体组织的部分医疗元件和上刀刃口进入避让槽。
47.可选的,所述使用方法中上刀刃口与下刀刃口闭合时,上刀刃口与下刀上的过线孔所在端面之间的距离小或等于医疗元件的直径。
48.可选的,所述使用方法中所述柔性连接机构包括柔性同步管和柔性鞘管;柔性同步管安装于柔性鞘管内,且可在柔性鞘管内移动;所述柔性同步管一端与执行机构连接,另一端与操作机构连接,以使操作机构通过柔性同步管而同步控制执行机构,进而控制执行机构的执行状态;柔性鞘管一端与执行机构连接,另一端与操作机构连接,并为柔性同步管提供支撑。
49.可选的,所述使用方法中所述柔性连接机构包括柔性同步管和柔性鞘管;柔性同步管安装于柔性鞘管内,且可在柔性鞘管内移动;所述柔性同步管一端与上刀的牵拉臂连接,另一端与操作机构连接,以使操作机构通过拉动柔性同步管以控制上刀转动,进而控制执行机构的执行状态;柔性鞘管一端与基座上远离下刀的端部连接,另一端与操作机构连接,并为柔性同步管提供支撑。
50.可选的,所述使用方法中所述操作机构包括壳体,壳体的左右两侧设置有滑槽;壳体内还安装有前座、后座和手柄机构;所述前座固定安装于壳体内,前座靠近执行机构的一端与柔性鞘管连接;所述后座设置于壳体内,柔性同步管穿过前座的轴向内孔后与后座的一端连接,后座的另一端与手柄机构连接;所述后座可沿壳体的左右两侧设置的滑槽滑动;
使用时,手柄机构带动后座沿滑槽往复运动以控制柔性同步管前后移动,以控制执行机构的工作状态。
51.可选的,所述使用方法中所述手柄机构包括连杆、扳手和拉簧;所述扳手转动连接在壳体上,扳手位于壳体内的部分的一侧与拉簧连接,拉簧的另一端固定在壳体内,拉簧用于控制手柄机构复位;扳手位于壳体内的部分的另一侧与连杆的一端连接,连杆的另一端与后座上远离执行机构的端部连接。
52.可选的,所述使用方法中扳手上外力作用点与扳手和壳体的转动连接点之间的力臂长度为l1,连杆与扳手和壳体的转动连接点之间的力臂长度为l2,l1大于l2,以减小剪切操作力。
53.上述具体实施方式,并不构成对本发明保护范围的限制。本领域技术人员应该明白的是,取决于设计要求和其他因素,可以发生各种各样的修改、组合、子组合和替代。任何在本发明的精神和原则之内所作的修改、等同替换和改进等,均应包含在本发明保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。