1.本发明属于医疗康复设备技术领域,涉及一种肢体康复训练床。
背景技术:
2.在肢体术后恢复和偏瘫患者肢体的康复过程中,需要对患者的肢体进行活动,对肌肉进行牵拉,避免肢体长时间不动导致肌肉萎缩,丧失肢体功能。
3.根据传统锻炼方法,都是通过医护人员定期活动患者的肢体,转动患者的两个手臂,来回抬举患者的双腿,这种锻炼方法对医护人员的体力要求高,劳动强度大,费时费力,而且还影响患者的康复效率。
技术实现要素:
4.本发明的目的是针对现有的技术存在上述问题,提出了一种肢体康复训练床,本发明能够活动患者的手臂和腿部,提高患者的康复效率。
5.本发明的目的可通过下列技术方案来实现:
6.一种肢体康复训练床,包括训练床本体,所述训练床本体底部的前后两侧分别设有两个支撑板,所述训练床本体沿长度方向的一侧开设有矩形孔;
7.第一转轴,所述第一转轴水平转动设置在矩形孔内,所述第一转轴的轴向和训练床本体的宽度方向一致,所述第一转轴的两端分别固设有两个第一转动杆;
8.活动杆,所述活动杆沿长度方向滑动设置在矩形孔的下方,所述活动杆上固设有两个第二转动杆;
9.第二转轴,两个所述第一转动杆的另一端和两个第二转动杆的另一端通过第二转轴铰接在一起,位于两个第二转动杆之间的第二转轴上转动设置有第三橡胶筒,所述第二转轴的轴向和训练床本体的宽度方向一致,所述第二转轴位于矩形孔的上方且两端伸出矩形孔的两侧边;
10.驱动机构,所述驱动机构设置在训练床本体的底部,所述驱动机构能够带动活动杆沿训练床本体的长度方向水平来回移动;
11.腿托机构,所述腿托机构设置在第一转动杆和第二转动杆上,所述腿托机构能够承托患者的大腿和小腿;
12.手臂活动机构,所述手臂活动机构设置在训练床本体上,所述手臂活动机构能够活动患者的手臂。
13.在上述的一种肢体康复训练床中,所述驱动机构包括:
14.两个导向板,两个所述导向板平行设置在训练床本体的下侧面且分别位于矩形孔宽度方向的两侧,所述导向板上沿训练床本体的长度方向开设有长条状的滑槽孔,所述活动杆的两端分别滑动设置在两个滑槽孔内;
15.驱动结构,所述驱动结构设置在靠近矩形孔的支撑板上,所述驱动结构能够带动活动杆沿着两个滑槽孔水平来回滑动。
16.在上述的一种肢体康复训练床中,所述驱动结构包括:
17.电机,靠近矩形孔的支撑板上水平设有底座,所述电机固设在底座上,所述电机的输出轴上固设有第一连杆;
18.第二连杆,所述第二连杆的一端与第一连杆远离电机的一端铰接,另一端铰接在活动杆上。
19.在上述的一种肢体康复训练床中,所述活动杆的两端伸出相对应的滑槽孔且端部转动设置有齿轮,所述训练床本体的底部平行设有两个齿条,两个所述齿条分别位于两个导向板的外侧,两个所述齿轮和两个齿条一一对应,所述齿轮和相对应的齿条啮合连接。
20.在上述的一种肢体康复训练床中,所述腿托机构包括:
21.两个第一固定轴,两个所述第一固定轴沿长度方向依次固设在两个第一转动杆之间,所述第一固定轴的长度方向和第一转轴的轴向一致,所述第一固定轴上转动设置有第一橡胶筒;
22.两个第二固定轴,两个所述第二固定轴沿长度方向依次固设在两个第二转动杆之间,所述第二固定轴和第一固定轴平行,所述第二固定轴上转动设置有第二橡胶筒。
23.在上述的一种肢体康复训练床中,两个所述第二橡胶筒的长度方向上依次设有两个环形凹槽。
24.在上述的一种肢体康复训练床中,所述手臂活动机构包括:
25.第一滑杆,所述第一滑杆通过两个第一固定板水平固设在训练床本体的左侧,所述第一滑杆的长度方向和训练床本体的长度方向一致;
26.第二滑杆,所述第二滑杆通过两个第二固定板水平固设在训练床本体的右侧,所述第二滑杆的长度方向和训练床本体的长度方向一致;
27.第一拉绳,所述第一拉绳的一端通过第一滑动结构设置在第一滑杆上,所述第一拉绳的另一端连接有固定环,所述第一滑动结构能够带动第一拉绳的一端沿着第一滑杆的长度方向来回滑动;
28.第三拉绳,所述第三拉绳的一端通过第二滑动结构设置在第二滑杆上,所述第三拉绳的另一端与固定环固连,所述第二滑动结构能够带动第三拉绳的一端沿着第二滑杆的长度方向来回滑动。
29.在上述的一种肢体康复训练床中,所述第一滑动结构包括:
30.第一套管,所述第一套管滑动设置在第一滑杆上,所述第一套管上转动设置有第一转动柱,所述第一拉绳的一端与第一转动柱固连;
31.第一电动推杆,所述第一电动推杆的一端固设在靠近第一套管的第一固定板上,所述第一电动推杆的另一端铰接在第一套管上。
32.在上述的一种肢体康复训练床中,所述第二滑动结构包括:
33.第三套管,所述第三套管滑动设置在第二滑杆上,所述第三套管上转动设置有第三转动柱,所述第三拉绳的一端与第三转动柱固连;
34.第二电动推杆,所述第二电动推杆的一端固设在靠近第三套管的第二固定板上,所述第二电动推杆的另一端铰接在第三套管上。
35.在上述的一种肢体康复训练床中,所述第一滑杆上滑动设置有第二套管,所述第二套管上转动设置有第二转动柱,所述第二转动柱上连接有第二拉绳,所述第二拉绳远离
第二转动柱的一端与固定环固连,所述第一滑杆上设有第一限位凸沿,位于第二套管和第一限位凸沿之间的第一滑杆上套设有第一复位弹簧,所述第二滑杆上滑动设置有第四套管,所述第四套管上转动设置有第四转动柱,所述第四转动柱上连接有第四拉绳,所述第四拉绳远离第四转动柱的一端与固定环固连,所述第二滑杆上设有第二限位凸沿,位于第四套管和第二限位凸沿之间的第二滑杆上套设有第二复位弹簧。
36.与现有技术相比,本发明具有以下优点:
37.1、患者躺在训练床本体上,使患者的膝盖弯曲处位于第三橡胶筒上,通过腿托机构承托患者的大腿和小腿,初始状态,活动杆和第一转轴分别位于矩形孔长度方向的两侧,而且第二转轴位于矩形孔的上方,使第一转动杆和第二转动杆之间呈一定的角度,患者的膝盖微微弯曲,启动驱动机构,带动活动杆向第一转轴的方向水平移动,由于第一转轴的位置相对固定,使第二转轴向上向第一转轴移动,通过第三橡胶筒将患者的膝盖托起,大腿向患者的上半身弯曲,该过程中患者的大腿和小腿都发生了转动,锻炼整个腿部肌肉,操作合理;此外,通过手臂活动机构活动患者的手臂,锻炼患者的手臂肌肉,免去了医护人员操作的麻烦,省时省力;
38.2、启动驱动结构,带动活动杆沿着两个滑槽孔来回滑动,使第二转轴绕着第一转轴上下转动,带动患者的膝盖弯曲和伸直,锻炼大腿和小腿的肌肉;此外,两个滑槽孔能够限制活动杆的滑动范围,控制膝盖弯曲的角度,避免过度锻炼,对患者造成二次伤害;
39.3、启动电机,带动第一连杆始终朝一个方向转动,通过第二连杆实现活动杆沿着两个滑槽孔水平来回滑动,结构简单,传动效率高;
40.4、由于活动杆两端的齿轮和两个齿条啮合连接,当活动杆沿着两个滑槽孔来回滑动时,两个齿轮在两个齿条的作用下同时发生转动,使活动杆能够稳定的水平移动,不会发生倾斜,结构简单;
41.5、当患者的膝盖弯曲部位放置在第二转轴的第三橡胶筒上,两个第一橡胶筒对患者的大腿起到支撑作用,两个第二橡胶筒对患者的小腿起到支撑作用,将整个腿部承托起来,提高患者的舒适度;此外,由于第一橡胶筒和第二橡胶筒都可以转动,当活动杆水平移动时,第一橡胶筒和第二橡胶筒会发生转动,橡胶凸点对腿部的肌肉有一定的按摩作用;
42.6、由于小腿的肌肉较为突出,两个环形凹槽正好贴合两个小腿突出的肌肉,避免小腿长时间放置在第二橡胶筒上,小腿肌肉受到压迫,提高患者的舒适度;
43.7、将固定环套设在患者的其中一个手臂上,通过第一滑动结构带动第一拉绳的一端沿着第一滑杆来回滑动,通过第二滑动结构带动第三拉绳的一端沿着第二滑杆来回滑动,由于第一拉绳和第三拉绳的长度固定不变,固定环的位置不断改变,带动患者的手臂不断弯曲和伸直,起到了锻炼的效果,避免手臂肌肉萎缩;
44.8、启动第一电动推杆,使其伸长,推动第一套管沿着第一滑杆滑动,带动第一拉绳的一端向患者的腿部方向移动,当第一电动推杆缩短时,拉动第一套管和第一拉绳的一端向患者的头部方向移动,不断改变第一套管和患者手臂之间的距离,结构简单;
45.9、启动第二电动推杆,使其伸长,推动第三套管沿着第二滑杆滑动,带动第三拉绳的一端向患者的腿部方向移动,当第二电动推杆缩短时,拉动第三套管和第三拉绳的一端向患者的头部方向移动,不断改变第三套管和患者手臂之间的距离,结构简单;
46.10、初始状态,第一复位弹簧和第二复位弹簧始终受到拉伸力,通过第一拉绳、第
二拉绳、第三拉绳和第四拉绳从四个方向将患者的手臂抬起悬空,减小手臂活动的阻力,然后通过第一电动推杆和第二电动推杆的伸缩,使固定环能够上下左右移动,提高手臂的活动范围。
附图说明
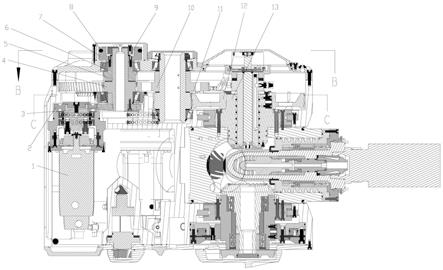
47.图1是本发明的结构示意图;
48.图2是图1中a
‑
a处的剖视图;
49.图3是图2中b
‑
b处的剖视图;
50.图4是本发明的第一工作状态图;
51.图5是本发明的第二工作状态图;
52.图6是本发明的第三工作状态图。
53.图中,1、训练床本体;11、挡板;12、支撑板;13、矩形孔;2、第一滑杆;21、第一套管;211、第一转动柱;212、第一拉绳;213、固定环;22、第二套管;221、第二转动柱;222、第二拉绳;23、第一固定板;24、第一电动推杆;25、第一限位凸沿;251、第一复位弹簧;3、第二滑杆;31、第三套管;311、第三转动柱;312、第三拉绳;32、第四套管;321、第四转动柱;322、第四拉绳;33、第二固定板;34、第二电动推杆;35、第二限位凸沿;351、第二复位弹簧;4、第一转轴;41、第一转动杆;42、第一固定轴;421、第一橡胶筒;5、活动杆;51、第二转动杆;52、第二固定轴;521、第二橡胶筒;53、齿轮;531、齿条;6、第二转轴;61、第三橡胶筒;7、电机;71、第一连杆;72、第二连杆;73、底座;8、导向板;81、滑槽孔。
具体实施方式
54.以下是本发明的具体实施例并结合附图,对本发明的技术方案作进一步的描述,但本发明并不限于这些实施例。
55.如图1至6所示,一种肢体康复训练床,包括训练床本体1、第一转轴4、活动杆5、第二转轴6、驱动机构、腿托机构和手臂活动机构。
56.所述训练床本体1底部的前后两侧分别设有两个支撑板12,所述训练床本体1上侧面的前后两侧分别设有两个挡板11,所述训练床本体1沿长度方向的一侧开设有矩形孔13,所述矩形孔13位于训练床本体1的尾部。
57.所述第一转轴4水平转动设置在矩形孔13内,所述第一转轴4的轴向和训练床本体1的宽度方向一致,所述第一转轴4的两端分别固设有两个第一转动杆41。
58.所述活动杆5沿长度方向滑动设置在矩形孔13的下方,所述活动杆5上固设有两个第二转动杆51,所述活动杆5和第一转轴4分别位于矩形孔13长度方向的两侧。
59.两个所述第一转动杆41的另一端和两个第二转动杆51的另一端通过第二转轴6铰接在一起,位于两个第二转动杆51之间的第二转轴6上转动设置有第三橡胶筒61,所述第二转轴6的轴向和训练床本体1的宽度方向一致,所述第二转轴6位于矩形孔13的上方且两端伸出矩形孔13的两侧边。
60.所述驱动机构设置在训练床本体1的底部,所述驱动机构能够带动活动杆5沿训练床本体1的长度方向水平来回移动。
61.所述腿托机构设置在第一转动杆41和第二转动杆51上,所述腿托机构能够承托患
者的大腿和小腿。
62.所述手臂活动机构设置在训练床本体1上,所述手臂活动机构能够活动患者的手臂。
63.患者躺在训练床本体1上,使患者的膝盖弯曲处位于第三橡胶筒61上,通过腿托机构承托患者的大腿和小腿,初始状态,活动杆5和第一转轴4分别位于矩形孔长度方向的两侧,而且第二转轴6位于矩形孔13的上方,使第一转动杆41和第二转动杆51之间呈一定的角度,患者的膝盖微微弯曲,启动驱动机构,带动活动杆5向第一转轴4的方向水平移动,由于第一转轴4的位置相对固定,使第二转轴6绕着第一转轴4向上转动,通过第三橡胶筒61将患者的膝盖托起,大腿向患者的上半身弯曲,该过程中患者的大腿和小腿都发生了转动,锻炼整个腿部肌肉,操作合理;此外,通过手臂活动机构活动患者的手臂,锻炼患者的手臂肌肉,免去了医护人员操作的麻烦,省时省力。
64.具体来说,所述驱动机构包括两个导向板8和驱动结构。
65.两个所述导向板8平行设置在训练床本体1的下侧面且分别位于矩形孔13宽度方向的两侧,所述导向板8上沿训练床本体1的长度方向开设有长条状的滑槽孔81,所述活动杆5的两端分别滑动设置在两个滑槽孔81内。
66.所述驱动结构设置在靠近矩形孔13的支撑板12上,所述驱动结构能够带动活动杆5沿着两个滑槽孔81水平来回滑动。
67.启动驱动结构,带动活动杆5沿着两个滑槽孔81来回滑动,使第二转轴6绕着第一转轴4上下转动,带动患者的膝盖弯曲和伸直,锻炼大腿和小腿的肌肉;此外,两个滑槽孔81能够限制活动杆5的滑动范围,控制膝盖弯曲的角度,避免过度锻炼,对患者造成二次伤害。
68.具体来说,所述驱动结构包括电机7和第二连杆72。
69.靠近矩形孔13的支撑板12上水平设有底座73,所述电机7固设在底座73上,所述电机7的输出轴上固设有第一连杆71。
70.所述第二连杆72的一端与第一连杆71远离电机7的一端铰接,另一端铰接在活动杆5上。
71.启动电机7,带动第一连杆71始终朝一个方向转动,通过第二连杆72实现活动杆5沿着两个滑槽孔81水平来回滑动,结构简单,传动效率高。
72.具体来说,所述活动杆5的两端伸出相对应的滑槽孔81且端部转动设置有齿轮53,所述训练床本体1的底部平行设有两个齿条531,两个所述齿条531分别位于两个导向板8的外侧,两个所述齿轮53和两个齿条531一一对应,所述齿轮53和相对应的齿条531啮合连接。
73.由于活动杆5两端的齿轮53和两个齿条531啮合连接,当活动杆5沿着两个滑槽孔81来回滑动时,两个齿轮53在两个齿条531的作用下同时发生转动,使活动杆5能够稳定的水平移动,不会发生倾斜,结构简单。
74.具体来说,所述腿托机构包括两个第一固定轴42和两个第二固定轴52。
75.两个所述第一固定轴42沿长度方向依次固设在两个第一转动杆41之间,所述第一固定轴42的长度方向和第一转轴4的轴向一致,所述第一固定轴42上转动设置有第一橡胶筒421,优选地,所述第一橡胶筒421的筒面上设有若干个橡胶凸点。
76.两个所述第二固定轴52沿长度方向依次固设在两个第二转动杆51之间,所述第二固定轴52和第一固定轴42平行,所述第二固定轴52上转动设置有第二橡胶筒521,优选地,
所述第二橡胶筒521的筒面上设有若干个橡胶凸点。
77.当患者的膝盖弯曲部位放置在第二转轴6的第三橡胶筒61上,两个第一橡胶筒421对患者的大腿起到支撑作用,两个第二橡胶筒521对患者的小腿起到支撑作用,将整个腿部承托起来,提高患者的舒适度;此外,由于第一橡胶筒421和第二橡胶筒521都可以转动,当活动杆5水平移动时,第一橡胶筒421和第二橡胶筒521会发生转动,橡胶凸点对腿部的肌肉有一定的按摩作用。
78.具体来说,两个所述第二橡胶筒521的长度方向上依次设有两个环形凹槽522。
79.由于小腿的肌肉较为突出,两个环形凹槽522正好贴合两个小腿突出的肌肉,避免小腿长时间放置在第二橡胶筒521上,小腿肌肉受到压迫,提高患者的舒适度。
80.具体来说,所述手臂活动机构包括第一滑杆2、第二滑杆3、第一拉绳212和第三拉绳312。
81.所述训练床本体1左侧的前后两端平行固设有两个第一固定板23,所述第一滑杆2通过两个第一固定板23水平固设在训练床本体1的左侧,所述第一滑杆2的长度方向和训练床本体1的长度方向一致,。
82.所述训练船本体1右侧的前后两端平行固设有两个第二固定板33,所述第二滑杆3通过两个第二固定板33水平固设在训练床本体1的右侧,所述第二滑杆3的长度方向和训练床本体1的长度方向一致。
83.所述第一拉绳212的一端通过第一滑动结构设置在第一滑杆2上,所述第一拉绳212的另一端连接有固定环213,所述第一滑动结构能够带动第一拉绳212的一端沿着第一滑杆2的长度方向来回滑动。
84.所述第三拉绳312的一端通过第二滑动结构设置在第二滑杆3上,所述第三拉绳312的另一端与固定环213固连,所述第二滑动结构能够带动第三拉绳312的一端沿着第二滑杆3的长度方向来回滑动。
85.将固定环213套设在患者的其中一个手臂上,通过第一滑动结构带动第一拉绳212的一端沿着第一滑杆2来回滑动,通过第二滑动结构带动第三拉绳312的一端沿着第二滑杆3来回滑动,由于第一拉绳212和第三拉绳312的长度固定不变,固定环213的位置不断改变,带动患者的手臂不断弯曲和伸直,起到了锻炼的效果,避免手臂肌肉萎缩。
86.具体来说,所述第一滑动结构包括第一套管21和第一电动推杆24。
87.所述第一套管21滑动设置在第一滑杆2上,所述第一套管21上转动设置有第一转动柱211,所述第一拉绳212的一端与第一转动柱211固连。
88.所述第一电动推杆24的一端固设在靠近第一套管21的第一固定板23上,所述第一电动推杆24的另一端铰接在第一套管21上。
89.启动第一电动推杆24,使其伸长,推动第一套管21沿着第一滑杆2滑动,带动第一拉绳212的一端向患者的腿部方向移动,当第一电动推杆24缩短时,拉动第一套管21和第一拉绳212的一端向患者的头部方向移动,不断改变第一套管21和患者手臂之间的距离,结构简单。
90.具体来说,所述第二滑动结构包括第三套管31和第二电动推杆34。
91.所述第三套管31滑动设置在第二滑杆3上,所述第三套管31上转动设置有第三转动柱311,所述第三拉绳312的一端与第三转动柱311固连。
92.所述第二电动推杆34的一端固设在靠近第三套管31的第二固定板33上,所述第二电动推杆34的另一端铰接在第三套管31上。
93.启动第二电动推杆34,使其伸长,推动第三套管31沿着第二滑杆3滑动,带动第三拉绳312的一端向患者的腿部方向移动,当第二电动推杆34缩短时,拉动第三套管31和第三拉绳312的一端向患者的头部方向移动,不断改变第三套管31和患者手臂之间的距离,结构简单。
94.具体来说,所述第一滑杆2上滑动设置有第二套管22,所述第二套管22上转动设置有第二转动柱221,所述第二转动柱221上连接有第二拉绳222,所述第二拉绳222远离第二转动柱221的一端与固定环213固连,所述第一滑杆2上设有第一限位凸沿25,所述第一滑杆2上套设有第一复位弹簧251,所述第一复位弹簧251的一端与第二套管22固连,另一端与第一限位凸沿25固连,所述第二滑杆3上滑动设置有第四套管32,所述第四套管32上转动设置有第四转动柱321,所述第四转动柱321上连接有第四拉绳322,所述第四拉绳322远离第四转动柱321的一端与固定环213固连,所述第二滑杆3上设有第二限位凸沿35,所述第二滑杆3上套设有第二复位弹簧351,所述第二复位弹簧351的一端与第四套管32固连,另一端与第二限位凸沿35固连。
95.初始状态,第一复位弹簧251和第二复位弹簧351始终受到拉伸力,通过第一拉绳212、第二拉绳222、第三拉绳312和第四拉绳322从四个方向将患者的手臂抬起悬空,减小手臂活动的阻力,然后通过第一电动推杆24和第二电动推杆34的伸缩,使固定环213能够上下左右移动,提高手臂的活动范围。
96.在本专利的描述中,需要理解的是,术语“上”、“下”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本专利和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本专利的限制。
97.本文中所描述的具体实施例仅仅是对本发明精神作举例说明。本发明所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本发明的精神或者超越所附权利要求书所定义的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。