1.本发明属于激光技术应用领域,应用于带激光的多光云台的激光光轴修正,具体涉及一种基于图像的激光云台光轴修正方法及装置。
背景技术:
2.目前行业中有很多三光云台、四光云台等云台设备许多都具备激光,目前激光云台光轴调整均是由装配时校准,装配过程复杂耗时,而在很多情况下,人工光轴台校准的云台光轴与可见光光轴之间存在有多个像素级偏差。同时,行业中可见光变倍相机的1个像素大小普遍小于0.0005
°
夹角,高精度的要求也使得许多机器因为装配精度不高、结构应力、结构的热胀冷缩、外力作用等原因而导致光轴改变。而光轴的改变也使得激光云台在实现光轴偏移对远距离目标照射、测距等功能时,无法正常打在目标上产生偏差,使得测量结果或照射结果与实际不符。
技术实现要素:
3.为解决现有技术中因光轴的改变或偏差导致的激光云台在实现远距离目标照射、测距等功能时无法正常照射在目标上的问题,本发明提供了一种基于图像的激光云台光轴修正方法及装置,通过图像校准激光光轴,首先借助激光光斑测量工具测量光轴偏差角度,再根据光斑实际校准结果调整图像x、y轴裁剪中心坐标,最终使得光轴中心与图像中心重合,本发明整体方法简单,实现方便,不用拆卸云台,同时能够随时随地借助工具调整光轴位置,针对使用场景进行校准,校准精度高,误差小。完美解决了因光轴的改变或偏差导致的激光云台在实现远距离目标照射、测距等功能时无法正常照射在目标上的问题。
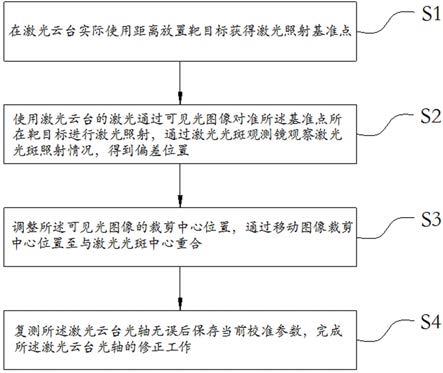
4.本发明采用以下技术方案实现:一种基于图像的激光云台光轴修正方法,应用于含激光的多光云台,用于激光云台的激光光轴与可见光光轴的校准,该基于图像的激光云台光轴修正方法包括:在激光云台实际使用距离放置靶目标获得激光照射基准点;使用激光云台的激光通过可见光图像对准所述基准点所在靶目标进行激光照射,通过激光光斑观测镜观察激光光斑照射情况,得到偏差位置;调整所述可见光图像的裁剪中心位置,通过移动图像裁剪中心位置至与激光光斑中心重合;复测所述激光云台光轴无误后保存当前校准参数,完成所述激光云台光轴的修正工作。
5.可选的,所述靶目标为放置在所述激光云台实际使用距离上的激光靶标,或者是以激光云台实际使用距离寻找照射目标,所述照射目标为寻找一个具有典型特征的目标。
6.进一步的,所述基准点作为激光云台进行激光偏移判断的特征点,所述激光云台的实际照射距离超过1km,则以1km目标为基准点。
7.可选的,所述可见光图像由多个可见光变倍相机获得,所述相机获得的多个相机
视频图像传输至云台处理器平台,所述云台处理器平台还用于对所述激光云台的激光进行控制。
8.进一步的,所述激光云台的云台相机图像最大分辨率大于云台相机视频分辨率,所述云台相机图像具有可供裁剪调整的空间,选取所述云台相机图像最大分辨率xy轴大于云台相机视频分辨率xy轴的10%以上。
9.进一步的,所述裁剪中心位置的获取方法,包括:通过云台处理器平台对云台相机图像进行处理,在所述云台相机图像中设定裁剪框,并设置所述裁剪框中心为裁剪中心,标定所述裁剪中心坐标为(x,y)。
10.其中,所述云台处理器平台还具备对各云台相机图像的裁剪中心调整的设置功能,云台处理器平台对各云台相机图像均设有独立的裁剪功能及裁剪中心,以方便各视频图像进行调节。
11.可选的,所述激光光斑中心的获取方法为:当以激光云台实际使用距离放置激光靶标或寻找照射目标获得激光照射基准点;使用激光云台进行激光照射后,根据观察的激光光斑照射情况,测得激光光斑中心。
12.进一步的,在裁剪框的图像裁剪区域标定所述激光光斑中心的坐标,所述激光光斑中心相对于所述裁剪中心的坐标为(x a,y b)。
13.可选的,所述移动图像裁剪中心位置至与激光光斑中心重合的方法为:根据获得的裁剪中心的坐标(x,y)以及激光光斑中心的坐标(x a,y b)计算得到光轴偏差角度,调整云台相机图像的x轴、y轴,移动所述裁剪框的图像裁剪区域至裁剪中心坐标与及激光光斑中心坐标重合。
14.本发明还包括一种基于图像的激光云台光轴修正装置,所述基于图像的激光云台光轴修正装置采用前述基于图像的激光云台光轴修正方法实现光轴校准工作;所述基于图像的激光云台光轴修正装置包括激光云台、相机、云台处理器平台以及靶目标;所述靶目标放置在激光云台实际使用距离上,用于获得激光照射基准点;所述相机为多个可见光变倍相机,用于获得可见光图像;所述激光云台用于激光照射靶目标获得基准点,还用于通过可见光图像对准所述基准点进行激光照射产生激光光斑;所述云台处理器平台用于对所述激光云台的激光进行控制,还用于对云台相机图像进行处理,在所述云台相机图像中设定裁剪框,并设置所述裁剪框中心为裁剪中心;还用于对各云台相机图像的裁剪中心调整,移动图像裁剪中心位置至与激光光斑中心重合,完成所述激光云台光轴的修正工作。
15.本发明还包括一种基于图像的激光云台光轴修正方法的应用,所述基于图像的激光云台光轴修正方法应用于生产装配阶段及正常使用阶段,其中,在生产装配阶段应用所述基于图像的激光云台光轴修正方法进行云台激光光轴修正的步骤为:在装配光轴台上手工装配云台至一定误差以内;使用云台对光轴台靶标进行激光照射,通过激光光斑照射情况,得到偏差位置;通过软件调整可见光视频图像裁剪中心位置,通过移动图像中心位置将图像中心与激光光轴中心对齐;完成激光云台光轴软件校准工作,保存当前校准参数,完成装配工作。
16.通过本应用在手工装配后通过上述云台激光光轴修正的步骤再次修正,可降低手工装配精度要求,降低手工装配难度,解决传统手工装配要求调节光轴至2像素以内,要求极高的问题。
17.在正常使用阶段应用所述基于图像的激光云台光轴修正方法进行云台激光光轴修正的步骤为:以激光云台实际使用距离放置激光靶标或寻找照射目标获得激光照射基准点;使用激光云台进行激光照射,通过激光光斑观测镜观察激光光斑照射情况,得到偏差位置;通过软件调整可见光视频图像裁剪中心位置,通过移动图像中心位置将图像中心与激光光轴中心对齐;完成激光云台光轴软件校准工作,保存当前校准参数。
18.在产品正常使用阶段,按照所述基于图像的激光云台光轴修正方法手工修正激光光轴,以修正因结构应力、热胀冷缩、外力等因素带来的激光光轴偏移问题。
19.本发明提供的技术方案,具有如下有益效果:本发明通过对大画幅图像裁剪中心调整以适配光轴中心的方法修正光轴位置,整体方法简单,实现方便,不需要拆卸云台,同时能够随时随地借助工具调整光轴位置,针对使用场景进行校准,校准精度高,误差小。减小了传统云台组装时光轴调试难度,手工调试后再通过本发明进行光轴调节,使得手工调整精度要求降低,大幅节省了装配人员装配时间。同时完美解决了因光轴的改变或偏差导致的激光云台在实现远距离目标照射、测距等功能时无法正常照射在目标上的问题。
附图说明
20.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:图1为本发明实施例1的一种基于图像的激光云台光轴修正方法的流程图。
21.图2为本发明实施例1的基于图像的激光云台光轴修正方法中设置裁剪中心的示意图。
22.图3为本发明实施例1的基于图像的激光云台光轴修正方法中测得激光光斑中心的示意图。
23.图4为本发明实施例1的基于图像的激光云台光轴修正方法中调整图像中心位置与激光光斑中心重合的示意图。
24.图5为本发明实施例2的一种基于图像的激光云台光轴修正装置的装置框图。
25.图6为本发明实施例3的基于图像的激光云台光轴修正方法应用于生产装配阶段的流程图。
26.图7为本发明实施例4的基于图像的激光云台光轴修正方法应用于正常使用阶段的流程。
具体实施方式
27.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对
本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
28.本发明提供的一种基于图像的激光云台光轴修正方法及装置,首先借助激光光斑测量工具测量光轴偏差角度,再根据光斑实际校准结果调整图像x、y轴裁剪中心坐标,最终使得光轴中心与图像中心重合,本发明整体方法简单,实现方便,不用拆卸云台,同时能够随时随地借助工具调整光轴位置,针对使用场景进行校准,校准精度高,误差小。完美解决了因光轴的改变或偏差导致的激光云台在实现远距离目标照射、测距等功能时无法正常照射在目标上的问题。以下将结合具体实施例加以说明。
29.实施例1如图1所示,本发明的一个实施例提供一种基于图像的激光云台光轴修正方法,该方法应用于含激光的多光云台,用于激光云台的激光光轴与可见光光轴的校准,该方法包括如下步骤:s1、在激光云台实际使用距离放置靶目标获得激光照射基准点。
30.在本实施例中,靶目标为放置在所述激光云台实际使用距离上的激光靶标,也可以为或者是以激光云台实际使用距离寻找照射目标,照射目标为寻找一个具有典型特征的目标获得激光照射的基准点,一般情况实际照射距离超过1km,则以1km目标为基准点,用于作为激光偏移判断的特征点。
31.需要特别说明的是,本实施例的基于图像的激光云台光轴修正方法应用于满足云台相机最大分辨率大于云台相机视频分辨率的多光云台产品,即本实施例适用于云台相机的可见光最大图像分辨率大于其视频分辨率的双光、三光、四光等多光云台中激光光轴与可见光光轴的校准。与此同时,在本发明的其他实施例中,也可以将本方法中激光照射基准点更换为图像基准点引申用于可见光与可见光、可见光与红外光等多光云台图像中心的校准。
32.s2、使用激光云台的激光通过可见光图像对准所述基准点所在靶目标进行激光照射,通过激光光斑观测镜观察激光光斑照射情况,得到偏差位置。
33.在本实施例中,使用激光云台的激光通过可见光图像对准基准点进行激光照射,通过激光光斑观测镜观察激光光斑照射情况,得到偏差位置。其中,部分云台相机可见光波段较宽,可直接看到激光光斑,则无需借助光斑观测设备。所述可见光图像由多个可见光变倍相机获得,所述相机获得的多个相机视频图像传输至云台处理器平台,所述云台处理器平台还用于对所述激光云台的激光进行控制。
34.s3、调整所述可见光图像的裁剪中心位置,通过移动图像裁剪中心位置至与激光光斑中心重合。
35.需要特别说明的是,所述激光云台的云台相机图像最大分辨率大于云台相机视频分辨率,所述云台相机图像具有可供裁剪调整的空间,选取所述云台相机图像最大分辨率xy轴大于云台相机视频分辨率xy轴的10%以上。基于此,所述裁剪中心位置的获取方法,包括:参见图2所示,通过云台处理器平台对云台相机图像进行处理,在所述云台相机图像中设定裁剪框,并设置所述裁剪框中心为裁剪中心,标定所述裁剪中心坐标为(x,y)。其中,所述云台处理器平台还具备对各云台相机图像的裁剪中心调整的设置功能,云台处理
器平台对各云台相机图像均设有独立的裁剪功能及裁剪中心,以方便各视频图像进行调节。
36.另外,参见图3所示,所述激光光斑中心的获取方法为:当以激光云台实际使用距离放置激光靶标或寻找照射目标获得激光照射基准点;使用激光云台进行激光照射后,根据观察的激光光斑照射情况,测得激光光斑中心。
37.当移动图像裁剪中心位置至与激光光斑中心重合时,参见图4所示,在裁剪框的图像裁剪区域标定所述激光光斑中心的坐标,所述激光光斑中心相对于所述裁剪中心的坐标为(x a,y b),所述移动图像裁剪中心位置至与激光光斑中心重合的方法为:根据获得的裁剪中心的坐标(x,y)以及激光光斑中心的坐标(x a,y b)计算得到光轴偏差角度,调整云台相机图像的x轴、y轴,移动所述裁剪框的图像裁剪区域至裁剪中心坐标与及激光光斑中心坐标重合。
38.s4、复测所述激光云台光轴无误后保存当前校准参数,完成所述激光云台光轴的修正工作。
39.在本实施例中,通过置于云台处理器平台的软件对大画幅图像裁剪中心调整以适配光轴中心的方法修正光轴位置,整体方法简单,实现方便,不用拆卸云台,同时能够随时随地借助工具调整光轴位置,针对使用场景进行校准,校准精度高,误差小。减小了传统云台组装时光轴调试难度,手工调试后再使用软件光轴调节,使得手工调整精度要求降低,大幅节省了装配人员装配时间。同时完美解决了因光轴的改变或偏差导致的激光云台在实现远距离目标照射、测距等功能时无法正常照射在目标上的问题。
40.实施例2如图5所示,本发明的一个实施例中提供了一种基于图像的激光云台光轴修正装置包括激光云台11、相机12、云台处理器平台13以及靶目标14。
41.所述靶目标14放置在激光云台11实际使用距离上,用于获得激光照射基准点。在本实施例中,所述靶目标14既可以是在激光云台11实际使用距离上的激光靶标,也可以是在激光云台11实际使用距离上寻找的一个照射目标,通过激光照射获得基准点,基准点作为激光偏移判断的特征点。
42.所述相机12用于获得可见光图像。所述相机12可以为连接云台处理器平台13的多个可见光变倍相机,相机12作为云台相机,相机12的云台相机图像最大分辨率大于图像视频分辨率,所述相机12的图像具有合适的可供裁剪调整的空间。
43.所述激光云台11用于激光照射靶目标14获得基准点,配合所述靶目标14进行激光照射得到基准点,还用于通过可见光图像对准所述基准点进行激光照射产生激光光斑,可测的激光光斑中心,通过激光光斑观测镜观察激光光斑照射情况,得到偏差位置。
44.所述云台处理器平台13用于对所述激光云台11的激光进行控制,还用于对云台相机12图像进行处理,在所述云台相机12图像中设定裁剪框,并设置所述裁剪框中心为裁剪中心;还用于对各云台相机12图像的裁剪中心调整,移动图像裁剪中心位置至与激光光斑中心重合,完成所述激光云台11光轴的修正工作。
45.本发明的基于图像的激光云台光轴修正装置,通过对大画幅图像裁剪中心调整以适配光轴中心的方法修正光轴位置,整体方法简单,实现方便,不需要拆卸云台,同时能够随时随地借助工具调整光轴位置,针对使用场景进行校准,校准精度高,误差小。减小了传
统云台组装时光轴调试难度,手工调试后再通过本发明进行光轴调节,使得手工调整精度要求降低,大幅节省了装配人员装配时间。同时完美解决了因光轴的改变或偏差导致的激光云台11在实现远距离目标照射、测距等功能时无法正常照射在目标上的问题。
46.实施例3在本发明的一个实施例中提供了一种基于图像的激光云台光轴修正方法的应用,所述基于图像的激光云台光轴修正方法应用于生产装配阶段。其中,如图6所示,在生产装配阶段应用所述基于图像的激光云台光轴修正方法进行云台激光光轴修正的步骤为:s301、在装配光轴台上手工装配云台至一定误差以内;s302、使用云台对光轴台靶标进行激光照射,通过激光光斑照射情况,得到偏差位置;s303、通过软件调整可见光视频图像裁剪中心位置,通过移动图像中心位置将图像中心与激光光轴中心对齐;s304、完成激光云台光轴软件校准工作,保存当前校准参数,完成装配工作。
47.通过本应用在手工装配后通过上述云台激光光轴修正的步骤再次修正,可降低手工装配精度要求,降低手工装配难度,解决传统手工装配要求调节光轴至2像素以内,要求极高的问题。
48.实施例4在本发明的一个实施例中提供了一种基于图像的激光云台光轴修正方法的应用,所述基于图像的激光云台光轴修正方法应用于正常使用阶段。其中,如图7所示,在正常使用阶段应用所述基于图像的激光云台光轴修正方法进行云台激光光轴修正的步骤为:s401、以激光云台实际使用距离放置激光靶标或寻找照射目标获得激光照射基准点;s402、使用激光云台进行激光照射,通过激光光斑观测镜观察激光光斑照射情况,得到偏差位置;s403、通过软件调整可见光视频图像裁剪中心位置,通过移动图像中心位置将图像中心与激光光轴中心对齐;s404、完成激光云台光轴软件校准工作,保存当前校准参数。
49.在产品正常使用阶段,按照所述基于图像的激光云台光轴修正方法手工修正激光光轴,以修正因结构应力、热胀冷缩、外力等因素带来的激光光轴偏移问题,在本发明的其他实施例中,基于实施例1中的基于图像的激光云台光轴修正方法,还可以应用于云台其他视频光轴校准中,如红外光轴及可见光光轴校准等。
50.实施例5在本发明的一个实施例中提供了一种计算机设备, 该计算机设备可以用于实施上述实施例中提供的基于图像的激光云台光轴修正方法,该计算机设备可以是智能手机、电脑、平板电脑等设备。
51.所述计算机设备包括存储器和处理器,存储器中存储有计算机程序,该处理器执行计算机程序时实现上述方法实施例中的步骤:在激光云台实际使用距离放置靶目标获得激光照射基准点;使用激光云台的激光通过可见光图像对准所述基准点所在靶目标进行激光照射,
通过激光光斑观测镜观察激光光斑照射情况,得到偏差位置;调整所述可见光图像的裁剪中心位置,通过移动图像裁剪中心位置至与激光光斑中心重合;复测所述激光云台光轴无误后保存当前校准参数,完成所述激光云台光轴的修正工作。
52.实施例6本发明的一个实施例中还提供了一种存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现上述各方法实施例中的步骤:在激光云台实际使用距离放置靶目标获得激光照射基准点;使用激光云台的激光通过可见光图像对准所述基准点所在靶目标进行激光照射,通过激光光斑观测镜观察激光光斑照射情况,得到偏差位置;调整所述可见光图像的裁剪中心位置,通过移动图像裁剪中心位置至与激光光斑中心重合;复测所述激光云台光轴无误后保存当前校准参数,完成所述激光云台光轴的修正工作。
53.需要说明的是,对本技术所述基于图像的激光云台光轴修正方法而言,本领域普通测试人员可以理解实现本技术实施例所述基于图像的激光云台光轴修正方法的全部或部分流程,是可以通过计算机程序来控制相关的硬件来完成,所述计算机程序可存储于一计算机可读存储介质中,如存储在计算机设备的存储器中,并被该计算机设备内的至少一个处理器执行,在执行过程中可包括如所述基于图像的激光云台光轴修正方法的实施例的流程。其中,所述存储介质可为磁碟、光盘、只读存储器(rom,read only memory)、随机存取记忆体(ram,random access memory)等。
54.对本技术实施例的所述基于图像的激光云台光轴修正装置而言,其各功能模块可以集成在一个处理芯片中,也可以是各个模块单独物理存在,也可以两个或两个以上模块集成在一个模块中。上述集成的模块既可以采用硬件的形式实现,也可以采用软件功能模块的形式实现。所述集成的模块如果以软件功能模块的形式实现并作为独立的产品销售或使用时,也可以存储在一个计算机可读存储介质中,所述存储介质譬如为只读存储器,磁盘或光盘等。
55.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。