1.本实用新型涉及工业机器人技术领域,特别是一种冷凝器抱夹机构。
背景技术:
2.工业机器人夹具为末端执行器,一般都是安装在机器人上。从结构上来说,是以气动夹紧居多,搭配信号反馈,比如说磁开线开关,只需要保证可靠的夹紧力就可以了。工业机器人智能柔性夹具是将工业机器人技术和产品柔性制造有机结合,不仅使企业节约了产品工艺开发、设备采购及人工成本,还大幅提高生产效率和新产品的制造质量。相比于过去,工业机器人、现场总线等新技术的出现为现代工厂的智能制造带来了新的机遇,使得产品的整线生产加工向全自动、高柔性、智能化的模式转变。
3.目前冷凝器一般通过人工搬运的,人力成本高,劳动强度大,通过工业机器人实现冷凝器的机械搬运,替代人工,实现自动化生产,显得很有必要。
技术实现要素:
4.为了克服现有技术的上述缺点,本实用新型的目的是提供一种冷凝器抱夹机构。
5.本实用新型解决其技术问题所采用的技术方案是:一种冷凝器抱夹机构,包括机器人连接板、机器人连接法兰、侧架和气缸,所述机器人连接板的下方两侧对称设置有侧架,所述侧架上端两侧设有轴向垫块,所述轴向垫块安装于所述侧架与所述机器人连接板之间,所述侧架的中部向外侧折弯处设有加强筋,所述侧架下端设有安装槽,所述安装槽内安装有固定板,所述气缸固定安装于所述固定板上,所述气缸的活塞杆连接有固定夹板,所述固定夹板内嵌安装有行程开关,所述侧架上设置有传感器,所述行程开关、所述传感器和所述气缸分别与plc控制器连接。所述固定夹板对称设置于所述气缸之间,所述固定夹板均竖直设置。
6.作为本实用新型的进一步改进:所述固定夹板内嵌有固定块,所述行程开关安装于所述固定块内。
7.作为本实用新型的进一步改进:所述固定夹板包括固定块和橡胶块,所述橡胶块可拆卸安装于所述固定块上。
8.作为本实用新型的进一步改进:所述橡胶块可替换成尼龙板。
9.作为本实用新型的进一步改进:所述固定板为“l”型结构。所述固定板由相互垂直的横板和竖板组成,所述固定板横板与所述固定夹板垂直,所述固定板竖板与所述固定夹板平行,所述气缸固定安装于所述固定板的横板上。
10.作为本实用新型的进一步改进:所述气缸的上下两侧均固定设置有导杆,所述气缸的活塞杆的一端与所述导杆的一端齐平。所述导杆与所述气缸为一体化结构。
11.作为本实用新型的进一步改进:所述气缸活塞杆的一端和所述导杆的一端均连接有推板,所述推板与固定夹板固定连接。
12.作为本实用新型的进一步改进:所述机器人连接法兰固定安装于所述机器人连接
板上端。
13.与现有技术相比,本实用新型的有益效果是:
14.1、本实用新型通过传感器检测冷凝器到位信号,通过plc控制器控制冷凝器抱夹机构运动至指定位置,同时启动气缸使导杆和活塞杆同步推出,推动固定夹板夹紧冷凝器,机器人控制冷凝器抱夹机构将抱夹起来的冷凝器搬运到指定位置。
15.2、本实用新型通过行程开关控制冷凝器抱夹机构夹紧冷凝器的力度和距离,确保冷凝器压紧运输且不易发生受损,提高自动化程度和工作效率及精度。
附图说明
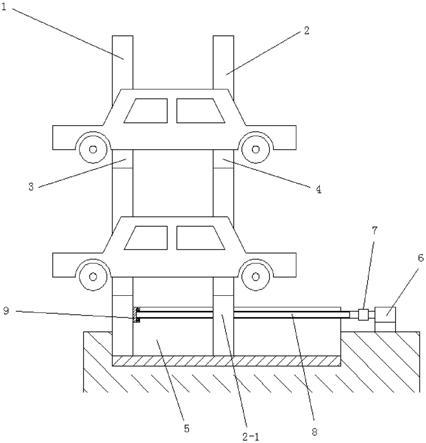
16.图1为本实用新型的结构示意图。
17.图2为本实用新型的剖面图。
18.图3为固定夹板的结构示意图。
具体实施方式
19.现结合附图说明与实施例对本实用新型进一步说明:
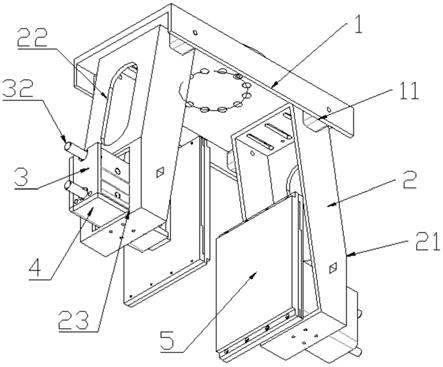
20.如图1至图3所示,本实用新型提供一种冷凝器抱夹机构,包括机器人连接板1、机器人连接法兰8、侧架2和气缸3,所述机器人连接板1的下方两侧对称设置有侧架2,所述侧架2上端两侧设有轴向垫块11,所述轴向垫块11安装于所述侧架2与所述机器人连接板1之间,所述侧架2的中部向外侧折弯处设有加强筋21,所述侧架2下端设有安装槽23,所述安装槽23内固定安装有固定板4,所述气缸3固定安装于所述固定板4上,所述气缸3的活塞杆32连接有固定夹板5,所述固定夹板5内嵌安装有行程开关6,所述侧架2上设置有传感器,所述行程开关6、所述传感器和所述气缸3分别与plc控制器连接。所述固定夹板5对称设置于所述气缸3之间,所述固定夹板5均竖直设置。
21.所述侧架2相对于所述安装槽23上方的位置上设有加强部22,所述加强部 22位于所述加强筋21的上方。所述加强筋21和所述加强部22用于防止侧架2 发生折弯断裂,加强所述侧架2的强度和硬度,使冷凝器抱夹机构整体稳固性加强。
22.所述固定夹板5内嵌有固定块,所述行程开关6安装于所述固定块内。
23.所述固定夹板5包括固定块51和橡胶块52,所述橡胶块52可拆卸安装于所述固定块51上。
24.所述橡胶块52可替换成尼龙板。所述橡胶块52或所述尼龙板用于防止抱夹冷凝器过程中增加摩擦力,使冷凝器抱夹过程中不易滑落,同时保护冷凝器翅片。另外,所述橡胶块52或所述尼龙板采用卡嵌固定安装方式,损坏后便于直接更换,节约成本。
25.所述固定板4为“l”型结构。所述固定板4由相互垂直的横板和竖板组成,所述固定板4横板与所述固定夹板5垂直,所述固定板4竖板与所述固定夹板 5平行,所述气缸3固定安装于所述固定板4的横板上。
26.所述气缸3的上下两侧均固定设置有导杆32,所述气缸3的活塞杆31的一端与所述导杆32的一端齐平。所述导杆32与所述气缸3为一体化结构。
27.所述气缸3活塞杆31的一端和所述导杆32的一端均连接有推板7,所述推板7与固定夹板5固定连接。
28.所述机器人连接法兰8固定安装于所述机器人连接板1上端。
29.本实用新型的工作原理:冷凝器运输至指定位置,侧架上的传感器检测到冷凝器的到位信号并通过发plc控制器将信号传输给机器人,所述机器人开始轴向运行至指定位置,此时侧架上的气缸处于初始位置,接收到plc控制器的信号开始动作,导杆和活塞杆齐头推动固定夹板接触、抱夹冷凝器,同时行程开关实时反馈夹紧的距离,从而控制气缸抱夹压紧,机器人控制抱夹机构运输至指定位置完成冷凝器的搬运。
30.本实用新型的主要功能:本实用新型通过机器人和传感器、plc控制器及行程开关配合,抱紧冷凝器,改变人工搬运的作业方式,具有降低劳动强度,实现自动化生产,提高生产效率,降低成本等特点。
31.综上所述,本领域的普通技术人员阅读本实用新型文件后,根据本实用新型的技术方案和技术构思无需创造性脑力劳动而作出其他各种相应的变换方案,均属于本实用新型所保护的范围。
技术特征:
1.一种冷凝器抱夹机构,其特征在于,包括机器人连接板、机器人连接法兰、侧架和气缸,所述机器人连接板的下方两侧对称设置有侧架,所述侧架上端两侧设有轴向垫块,所述轴向垫块安装于所述侧架与所述机器人连接板之间,所述侧架的中部向外侧折弯处设有加强筋,所述侧架下端设有安装槽,所述安装槽内安装有固定板,所述气缸固定安装于所述固定板上,所述气缸的活塞杆连接有固定夹板,所述固定夹板内嵌安装有行程开关,所述侧架上设置有传感器,所述行程开关、所述传感器和所述气缸分别与plc控制器连接。2.根据权利要求1所述的一种冷凝器抱夹机构,其特征在于,所述固定夹板包括固定块和橡胶块,所述橡胶块可拆卸安装于所述固定块上。3.根据权利要求1所述的一种冷凝器抱夹机构,其特征在于,所述固定板为“l”型结构。4.根据权利要求1所述的一种冷凝器抱夹机构,其特征在于,所述气缸的上下两侧均固定设置有导杆,所述气缸的活塞杆的一端与所述导杆的一端齐平。5.根据权利要求4所述的一种冷凝器抱夹机构,其特征在于,所述气缸活塞杆的一端和所述导杆的一端均连接有推板,所述推板与固定夹板固定连接。6.根据权利要求1所述的一种冷凝器抱夹机构,其特征在于,所述机器人连接法兰固定安装于所述机器人连接板上端。
技术总结
本实用新型公开了一种冷凝器抱夹机构,包括机器人连接板、机器人连接法兰、侧架和气缸,机器人连接板的下方两侧对称设置有侧架,侧架上端两侧设有轴向垫块,轴向垫块安装于侧架与机器人连接板之间,侧架的中部向外侧折弯处设有加强筋,侧架下端设有安装槽,安装槽内安装有固定板,气缸固定安装于固定板上,气缸的活塞杆连接有固定夹板所述固定夹板内嵌安装有行程开关,所述侧架上设置有传感器,行程开关、传感器和气缸分别与PLC控制器连接。本实用新型具有自动化生产,取代人工作业,提高生产效率,降低成本等特点。降低成本等特点。降低成本等特点。
技术研发人员:王莹 高海涛 陈庆贺 王宏亮 董杰 李敏
受保护的技术使用者:格力电器(合肥)有限公司
技术研发日:2021.09.08
技术公布日:2022/1/21
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。