1.本实用新型涉及起重机自动纠偏技术领域,尤其是涉及一种轨道式起重机电气控制系统。
背景技术:
2.现有轨道式起重机主要包括大车机构、小车机构、主梁、起升机构、电气系统,主要用于货场、料场货、散货的装卸作业,由于轨道式起重机起吊的重量大,大车跨距长,且行走距离长,容易导致轨道式起重机发生偏斜运行,使得主梁变形,影响使用寿命,同时还会造成较大的安全隐患。对此,急需改进。
技术实现要素:
3.本实用新型的目的在于克服上述现有技术的不足,提供一种轨道式起重机电气控制系统。
4.为了实现上述目的,本实用新型采用如下技术方案:
5.一种轨道式起重机电气控制系统,包括控制柜、操作柜、大车机构,所述控制柜与操作柜线路连接,所述控制柜内部安装有安装板,所述安装板安装有大车刚性腿变频器、大车柔性腿变频器、小车变频器和plc,所述大车机构沿铺设在地面的轨道长度方向前后移动,所述大车机构包括大车刚性腿和大车柔性腿,所述大车刚性腿和大车柔性腿上端配合安装有主梁,所述主梁安装有小车机构,所述小车机构沿主梁长度方向左右移动,所述主梁长度方向与轨道长度方向相互垂直,所述小车机构安装有起升机构,所述大车刚性腿变频器线路连接大车刚性腿电机,所述大车刚性腿电机驱动大车刚性腿前后移动,所述大车柔性腿变频器线路连接大车柔性腿电机,所述大车柔性腿电机驱动大车柔性腿前后移动,所述大车刚性腿和大车柔性腿同步前后移动驱动大车机构前后移动,所述小车变频器线路连接小车电机,所述小车电机驱动小车机构左右移动,所述plc线路连接起升电机,所述起升电机驱动起升机构上下方向移动,所述操作柜上部安装有操作板,所述操作板安装有触摸屏,所述触摸屏与plc线路连接,所述plc与大车刚性腿变频器、大车柔性腿变频器、小车变频器线路连接。
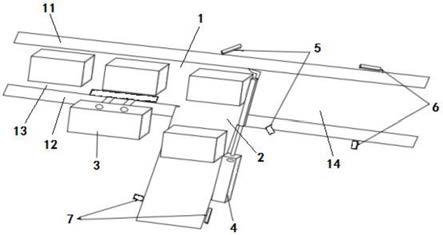
6.所述控制柜铰接有柜门,所述柜门转动对控制柜进行打开或闭合,所述柜门下部开设有过滤网罩开孔,所述控制柜一侧壁的上部开设有过滤网罩开孔。
7.所述控制柜顶部安装有散热罩,所述散热罩与控制柜内部连通,所述控制柜顶部安装有吊环,所述吊环位于散热罩两侧。
8.所述控制柜底面开设有进出线孔,所述进出线孔处安装有穿线盖板,所述穿线盖板覆盖进出线孔上端面,所述穿线盖板内设有若干护线圈,所述护线圈连通控制柜内外。
9.所述操作柜顶部为一个倾斜斜面,所述操作板倾斜朝上安装在操作柜顶部,所述操作板安装有若干指示灯和若干开关,所述指示灯、开关与plc线路连接。
10.所述操作柜底部安装有若干万向轮。
11.本实用新型的有益效果是:本实用新型通过大车刚性腿变频器、大车柔性腿变频器控制大车机构前后移动距离,通过小车变频器控制小车机构左右移动,通过plc控制起升机构上下移动,通过上述控制实现了轨道式起重机的自动化电气控制,保证了轨道式起重机能安全、高效、快捷的运行,保障了现场作业人员工作安全和轨道式起重机的使用安全。
附图说明
12.图1为本实用新型控制柜的结构示意图;
13.图2为本实用新型控制柜的左视示意图;
14.图3为本实用新型控制柜的内部示意图;
15.图4为图3中a
‑
a向的剖视示意图;
16.图5为本实用新型安装板的结构示意图;
17.图6为本实用新型操作柜的结构示意图;
18.图7为本实用新型操作板的结构示意图;
19.图8为本实用新型低压配电电气原理图;
20.图9为本实用新型主控制回路电气原理图;
21.图10为本实用新型起升机构回路和控制回路电气原理图;
22.图11为本实用新型小车机构的电气原理图;
23.图12为本实用新型小车制动器回路和控制回路电气原理图;
24.图13为本实用新型大车刚性腿和大车柔性腿的电气原理图;
25.图14为本实用新型大车刚性腿和大车柔性腿的制动器回路和控制回路电气原理图;
26.图15为本实用新型plc控制原理图。
27.图中:控制柜1、柜门2、散热罩3、过滤网罩开孔4、吊环5、进出线孔6、穿线盖板7、护线圈8、安装板9、总断路器10、总接触器11、大车刚性腿变频器12、大车柔性腿变频器13、小车变频器14、漏电保护器15、控制变压器16、plc17、相序继电器18、控制断路器19、断路器20、接触器21、继电器22、操作柜23、万向轮24、操作板25、触摸屏26、指示灯27、开关28。
具体实施方式
28.下面结合附图和具体实施方式对本实用新型作进一步描述:
29.在本说明书的描述中,术语“上”、“下”、“左”、“右”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或单元必须具有特定的方向、以特定的方位构造和操作,因此,不能理解为对本实用新型的限制。
30.如图1~图7所示,一种轨道式起重机电气控制系统,包括控制柜1、操作柜23、大车机构,所述控制柜1与操作柜23线路连接,所述控制柜1内部安装有安装板9,所述安装板9安装有大车刚性腿变频器12(所述大车刚性腿变频器12为电气图纸中的大车刚性腿变频器inv
‑
d1)、大车柔性腿变频器13(所述大车柔性腿变频器13为电气图纸中的大车柔性腿变频器inv
‑
d2)、小车变频器14(所述小车变频器14为电气图纸中的小车变频inv
‑
x1)和plc17(所述plc17为电气图纸中的plc),所述安装板9上还安装有其它电器设备。具体为,所述安
装板9第一排从左往右安装有总断路器10(所述总断路器10为电气图纸中的总断路器q1)、总接触器11(所述总接触器11为电气图纸中的总接触器km1)、大车刚性腿变频器12、大车柔性腿变频器13、小车变频器14,所述安装板9第二排从左往右安装有漏电保护器15、控制变压器16(所述控制变压器16为电气图纸中的控制变压器tc1)、plc17,所述安装板9第三排从左往右安装有相序继电器18(所述相序继电器18为电气图纸中的相序继电器ka0)、若干控制断路器19(所述控制断路器19包括控制断路器q7、控制断路器q8、控制断路器q9、小车控制断路器q10、大车控制断路器q11)、若干继电器22(所述继电器22包括继电器ka1、继电器ka2、继电器ka3、继电器ka4、继电器ka5、继电器ka6),所述安装板9第四排安装有若干断路器20(所述断路器20包括相序断路器q2、起升断路器q3、小车断路器q4、大车断路器q5、大车断路器q6),所述安装板9第五排安装有若干接触器21(所述接触器21包括辅助相序接触器km0、上升接触器km2、下降接触器km3、小车制动器接触器km4、接触器km5、刚性腿制动器接触器km6、接触器km7、柔性腿制动器接触器km8、接触器km9),所述安装板9第六排安装有若干继电器22(所述继电器22还包括继电器ka7、继电器ka8、继电器ka9、继电器ka10)。
31.所述大车机构沿铺设在地面的轨道长度方向前后移动,所述大车机构包括大车刚性腿和大车柔性腿,所述大车刚性腿和大车柔性腿上端配合安装有主梁,所述主梁安装有小车机构,所述小车机构沿主梁长度方向左右移动,所述主梁长度方向与轨道长度方向相互垂直,所述小车机构安装有起升机构,所述大车刚性腿变频器12线路连接大车刚性腿电机(所述大车刚性腿电机为电气图纸中的大车刚性腿电机md1),所述大车刚性腿电机驱动大车刚性腿前后移动,所述大车柔性腿变频器13线路连接大车柔性腿电机(所述大车柔性腿电机为电气图纸中的大车柔性腿电机md2),所述大车柔性腿电机驱动大车柔性腿前后移动,所述大车刚性腿和大车柔性腿同步前后移动驱动大车机构前后移动。
32.所述刚性腿上安装有刚性腿制动器(所述刚性腿制动器为电气图纸中的刚性腿制动器yd1),所述柔性腿上安装有柔性腿制动器(所述柔性腿制动器为电气图纸中的柔性腿制动器yd2),所述大车机构安装有位移检测机构,具体为:所述刚性腿和柔性腿分别安装有刚性腿位移检测机构和柔性腿位移检测机构,所述位移检测机构可以是光电编码器或测距传感器,进一步提高检测的精确性。
33.所述小车变频器14线路连接小车电机(所述小车电机为电气图纸中的小车电机mx1),所述小车电机驱动小车机构左右移动,所述小车机构上安装有小车制动器(所述小车制动器为电气图纸中的小车制动器yx1),所述plc17线路连接起升电机(所述起升电机为电气图纸中的起升电机m1),所述起升电机驱动起升机构上下方向移动。
34.所述操作柜23上部安装有操作板25,所述操作板25安装有触摸屏26(所述触摸屏26为电气图纸中的触摸屏hmi1),所述刚性腿位移检测机构和柔性腿位移检测机构与触摸屏26线路连接,所述刚性腿位移检测机构和柔性腿位移检测机构将检测到的数据导入触摸屏26,所述触摸屏26根据采集的数据计算得出偏差值,所述触摸屏26与plc17线路连接,所述plc17与大车刚性腿变频器12、大车柔性腿变频器13线路连接,所述触摸屏26将计算得出的偏差值传输至plc17,所述plc17根据该偏差值实时调节大车刚性腿变频器12、大车柔性腿变频器13的输出电压,实现在起重机运行过程中实时纠偏,实现了起重机的刚性腿和柔性腿实时保持同步运行,从而提高了轨道式起重机的使用安全性和使用寿命,保证了现场作业人员工作安全。
35.所述控制柜1铰接有柜门2,所述柜门2转动对控制柜1进行打开或闭合,所述柜门2下部开设有过滤网罩开孔4,所述控制柜1一侧壁的上部开设有过滤网罩开孔4。
36.所述控制柜1顶部安装有散热罩3,所述散热罩3与控制柜1内部连通,所述控制柜1顶部安装有吊环5,所述吊环5位于散热罩3两侧。
37.所述控制柜1底面开设有进出线孔6,所述进出线孔6处安装有穿线盖板7,所述穿线盖板7覆盖进出线孔6上端面,所述穿线盖板7内设有若干护线圈8,所述护线圈8连通控制柜1内外,所述线路通过护线圈8进出控制柜1,保证控制柜1内部具有良好的密封性。
38.所述操作柜23顶部为一个倾斜斜面,所述操作板25倾斜朝上安装在操作柜23顶部,所述倾斜朝上设置的操作板25安装有倾斜朝上的触摸屏26,所述倾斜朝上设置的触摸屏26便于操作人员,实时观测触摸屏26显示的数据,所述操作板25安装有若干指示灯27和若干开关28,所述指示灯27、开关28与plc17线路连接。
39.所述操作柜23底部安装有若干万向轮24。
40.如图8~图15所示,为本实用新型的电气图纸:
41.如图8所示,总断路器q1闭合,主回路得到ac380v电源,相序断路器q2闭合,相序继电器ka0得到ac380v电源,当相序正确,相序继电器ka0得电吸合,相序继电器ka0常开触点闭合;控制断路器q7闭合,控制变压器tc1得电,控制变压器tc1将ac380v电压转化成ac220v电压,控制断路器q8闭合,主控制回路得到ac220v电源;控制断路器q9闭合,直流稳压电源t1得电,直流稳压电源t1将ac220v电压转化成dc24v电源,为plc输出端提供dc24v电源。
42.如图9所示,当主控制回路得电时,电源指示灯hl1亮;辅助相序接触器km0线圈得电,辅助相序接触器km0常开触点闭合,按下启动按钮sb2,总接触器km1线圈得电吸合并自锁,总接触器km1常开触点闭合,控制回路导通,运行指示灯hl2亮,且在总接触器km1线圈与启动按钮sb2之间串联有停止按钮sb1、紧停按钮se1、紧停按钮se2、辅助相序接触器km0常开触点。
43.如图10所示,起升断路器q3闭合,起升机构回路得到ac220v电源。当需要起升机构上升时,通过触摸屏hmi1或开关28控制plc输出点y05输出电压,继电器ka1线圈得电吸合,继电器ka1常开触点闭合,起升机构上升接触器km2线圈得电吸合,起升机构上升接触器km2动作,启动电容c1与一相绕组串联,起升电机m1运行向上吊起货物,且所述起升机构回路串联有上限位行程开关sq1的常闭触点;当需要起升机构下降时,通过触摸屏hmi1或开关28控制plc输出点y07输出电压,继电器ka2线圈得电吸合,继电器ka2常开触点闭合,起升机构下降接触器km3线圈得电吸合,起升机构下降接触器km3动作,启动电容c1与另一相绕组串联,起升电机m1运行向下降下货物。(当起升机构上升或下降时,通过plc17编写的程序,对继电器ka1与继电器ka2进行互锁,保证起升机构安全运行。)
44.如图11所示,小车断路器q4闭合,小车变频器inv
‑
x1得到ac380v电源。当需要小车机构向左运行时,通过触摸屏hmi1或开关28控制plc输出点y10输出电压,继电器ka3线圈得电吸合,继电器ka3常开触点闭合,小车变频器inv
‑
x1的正转触点stf与公共触点sd导通,小车变频inv
‑
x1输出端输出电压,小车电机mx1得电正转,小车机构向左运行;当需要小车机构向右运行时,通过触摸屏hmi1或开关28控制plc输出点y11输出电压,继电器ka4线圈得电吸合,继电器ka4常开触点闭合,小车变频器inv
‑
x1的反转触点str与公共触点sd导通,小车变频器inv
‑
x1输出端输出电压,小车电机mx1得电反转,小车机构向右运行。
45.如图12所示,小车控制断路器q10闭合,小车制动器yx1回路得到ac220v电源。当需要启动小车制动器yx1时,通过触摸屏hmi1或开关28控制plc输出点y12输出电压,继电器ka5线圈得电吸合,继电器ka5常开触点闭合,小车制动器接触器km4线圈得电吸合,小车制动器接触器km4动作,小车制动器yx1得电工作。其中继电器ka6和接触器km5为继电器ka5和小车制动器接触器km4的备用设备。
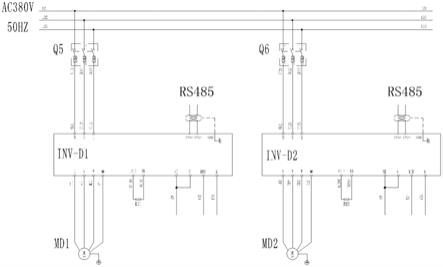
46.如图13所示,大车断路器q5闭合,大车刚性腿变频器inv
‑
d1得到ac380v电源;大车断路器q6闭合,大车柔性腿变频器inv
‑
d2得到ac380v电源。当需要大车刚性腿和大车柔性腿运行时,通过触摸屏hmi1将启动信号和启动之后的偏差值传输至plc,plc通过rs485通讯线分别连接大车刚性腿变频器inv
‑
d1、大车柔性腿变频器inv
‑
d2,大车刚性腿变频器inv
‑
d1、大车柔性腿变频器inv
‑
d2输出端输出电压,大车刚性腿电机md1、大车柔性腿电机md2动作。(所示rs485通讯线仅涉及线路连接结构,具体纠偏值调节的计算方法为现有技术,在此不作过多描述)
47.如图14所示,大车控制断路器q11闭合,刚性腿制动器yd1和柔性腿制动器yd2回路得到ac220v电源。当需要启动刚性腿制动器yd1时,通过触摸屏hmi1或开关28控制plc输出点y15输出电压,继电器ka7线圈得电吸合,继电器ka7常开触点闭合,刚性腿制动器接触器km6线圈得电吸合,刚性腿制动器接触器km6动作,刚性腿制动器yd1得电工作;当需要启动柔性腿制动器yd2时,通过触摸屏hmi1或开关28控制plc输出点y21输出,继电器ka9线圈得电吸合,继电器ka9常开触点闭合,柔性腿制动器接触器km8线圈得电吸合,柔性腿制动器接触器km8动作,柔性腿制动器yd2得电工作。其中继电器ka8和接触器km7为电器ka7和刚性腿制动器接触器km6的备用设备,继电器ka10和接触器km9为继电器ka9和柔性腿制动器接触器km8的备用设备。
48.以上所述仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。