1.本实用新型属于奶牛体尺信息采集技术领域,具体涉及一种无接触式奶牛体尺信息采集装置。
背景技术:
2.奶牛养殖业蓬勃发展的国家的实际产出表明,规模化、标准化养殖是奶牛养殖业兴盛的必然之路。故奶牛的规模化、标准化养殖也是提升我国奶业竞争力和品质的必然要求。规模化、标准化养殖需要优良的奶牛品种,而奶牛的体尺参数对选育优良体型奶牛品种具有重要的意义:第一,体型优良的奶牛生产性能好、经济效益高,许多研究表明,体型性状的表现与健康状况、寿命长短及繁殖率等生产性能指标均有很大的相关性;第二,体型优良的奶牛更适于机械化挤奶装备和高效的生产管理;第三,有利于减少育种周期;第四,从商业利益看,体型优良的奶牛其售价更高。总之,选育优良体型的奶牛品种有助于选出健康、高产、适用于机械化管理的奶牛,并促进奶牛规模化、标准化养殖。而奶牛体尺信息是进行优良体型奶牛品种选育的依据,因此体尺信息的测量显得尤为重要。
3.目前奶牛体尺参数指标的检测多为人工应用卡尺、皮尺等量具进行测量,工作量大,而且易受人为因素、奶牛配合程度等的影响,测量精度低。
技术实现要素:
4.本实用新型提供了一种无接触式奶牛体尺信息采集装置,用以提供一种简单且自动化的采集装置实现奶牛体尺信息自动采集的系统。
5.为解决上述技术问题,本实用新型所包括的技术方案以及技术方案对应的有益效果如下:
6.本实用新型提供了一种无接触式奶牛体尺信息采集装置,包括主控模块、门型支架、两个支撑脚架和至少三个深度相机;
7.所述门型支架包括两个立柱和一个横梁;横梁上设置有至少一个深度相机,横梁上设置的所有深度相机的视场范围总和覆盖目标奶牛的上侧;每一个立柱上均设置有至少一个深度相机,立柱上设置的所有深度相机的视场范围总和覆盖目标奶牛的两侧;
8.所述支撑脚架,两个支撑脚架分别设置在两个立柱的底部;
9.所述主控模块与所有深度相机相连,用于控制深度相机工作并获取深度相机拍摄的内容。
10.上述技术方案的有益效果为:本实用新型的采集装置,包括门型支架,门型支架的横梁上设置有至少一个深度相机,从而能够完整覆盖目标奶牛的上侧,门型支架的每个立柱上均设置有至少一个深度相机,从而能够完整覆盖目标奶牛的两侧,从而可以得到覆盖目标奶牛完整身体区域的深度图像,进而利用该覆盖目标奶牛完整身体区域的深度图像进行处理可获取奶牛的体尺信息。整个奶牛体尺信息采集装置结构简单、易于实现,具有较高的实用性,为实现无接触、全自动、无应激且测量精度高的奶牛体尺采集提供硬件支撑。
11.进一步的,为了实现深度相机位置的微调以实现深度相机拍摄的图像能够完整覆盖奶牛,所述采集装置还包括与深度相机数量相同的滑轨模块,所述深度相机通过相应的滑轨模块设置于横梁上或者立柱上;
12.用于将深度相机设置于横梁上的滑轨模块位于水平面内,且包括第一滑轨和第二滑轨,第一滑轨设置在横梁上且第一滑轨上导向移动设置有第一运动机构,第一运动机构上设置有第二滑轨,第二滑轨上导向移动设置有第二运动机构,第二滑轨与第一滑轨在水平面内交叉设置,第二运动机构上设置有深度相机;
13.用于将深度相机设置于立柱上的滑轨模块位于与水平面垂直的垂直平面内,且包括第三滑轨和第四滑轨,第三滑轨设置在立柱上且第三滑轨上导向移动设置有第三运动机构,第三运动机构上设置有第四滑轨,第四滑轨上导向移动设置有第四运动机构,第四滑轨与第三滑轨在所述垂直平面内交叉设置,第四运动机构上设置有深度相机。
14.进一步的,所述第一运动机构为内嵌至第一滑轨内的第一滑轮,且第一滑轮由第一滑轨电机驱动;所述第二运动机构为内嵌至第二滑轨内的第二滑轮,且第二滑轮由第二滑轨电机驱动;
15.所述第三运动机构为内嵌至第三滑轨内的第三滑轮,且第三滑轮由第三滑轨电机驱动;所述第四运动机构为内嵌至第四滑轨内的第四滑轮,且第四滑轮由第四滑轨电机驱动;
16.第一滑轨电机、第二滑轨电机、第三滑轨电机和第四滑轨电机均由所述主控模块来控制。
17.进一步的,为了稳定固定主控模块,所述主控模块通过螺丝固定设置在横梁上。
18.进一步的,为了实现整个采集装置的固定,避免因外在因素导致装置晃动而影响图像采集质量,所述采集装置还包括用于固定所述采集装置的两个固定模块;
19.每个固定模块均包括一个支撑块,每个支撑脚架通过一个支撑块设置在相应立柱的底部;每个支撑块均摆动装配至少三个支撑杆,以使每个支撑杆均能够沿着其与支撑块连接的一端做支点运动,所述至少三个支撑杆间隔布置,每个支撑杆的摆动行程均具有一个支撑位,每个支撑杆均位于支撑位时每个支撑杆的另一端均位于地面上。
20.进一步的,由支撑杆电机驱动支撑杆以实现支撑杆的支点运动,且主控模块控制连接所述支撑杆电机。
21.进一步的,为了保证拍摄到完整的目标奶牛的两侧,每一个立柱上均设置有一个深度相机,且设置在立柱中心靠下位置处。
22.进一步的,为了保证拍摄到完整的目标奶牛的两侧,每一个立柱上均设置有两个深度相机,且其中一个深度相机设置在立柱中心靠上位置处,另一个深度相机设置在立柱中心靠下位置处。
23.进一步的,为了方便移动整个采集装置,所述采集装置还包括行走轮,每个支撑脚架的底部均设置有至少一个行走轮,用于带动门型支架和门型支架上设置的深度相机移动,且行走轮由行驶电机驱动。
24.进一步的,每个支撑脚架的底部均设置有两个行走轮。
25.进一步的,所述行驶电机设置在支撑脚架上。
附图说明
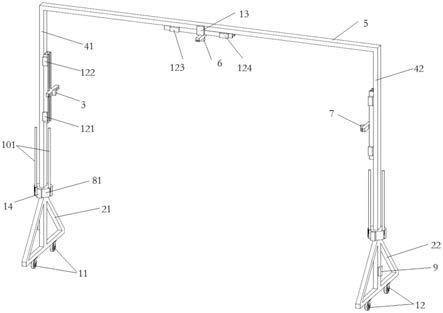
26.图1是本实用新型的一种无接触式奶牛体尺信息采集装置的结构图;
27.其中,11
‑
第一对行走轮,12
‑
第二对行走轮,21
‑
第一支撑脚架,22
‑
第二支撑脚架,3
‑
第一深度相机d1,41
‑
第一立柱,42
‑
第二立柱,5
‑
横梁,6
‑
第二深度相机d2,7
‑
第三深度相机d3,81
‑
第一支撑架圆环,9
‑
行驶电机,101
‑
支撑杆,121
‑
第三滑轨电机,122
‑
第四滑轨电机,123
‑
第一滑轨电机,124
‑
第二滑轨电机,13
‑
主控模块,14
‑
支撑杆电机;
28.图2
‑
1是本实用新型的第一滑轨模块的结构图;
29.其中,5
‑
横梁,113
‑
第一滑轨,114
‑
第二滑轨,123
‑
第一滑轨电机,124
‑
第二滑轨电机,13
‑
主控模块,6
‑
第二深度相机d2;
30.图2
‑
2是本实用新型的第二滑轨模块的结构图;
31.其中,41
‑
第一立柱,111
‑
第三滑轨,112
‑
第四滑轨,121
‑
第三滑轨电机,122
‑
第四滑轨电机,3
‑
第一深度相机d1;
32.图3
‑
1是正视情况下三个深度相机视场范围示意图;
33.图3
‑
2是侧视情况下三个深度相机视场范围示意图;
34.图3
‑
3是俯视情况下其中两个深度相机视场范围示意图;
35.图4
‑
1是本实用新型的一个立柱上设置两个深度相机时正视情况下深度相机的视场范围示意图;
36.图4
‑
2是本实用新型的一个立柱上设置两个深度相机时俯视情况下深度相机的视场范围示意图;
37.图4
‑
3是本实用新型的一个立柱上设置两个深度相机时侧视情况下深度相机的视场范围示意图。
具体实施方式
38.本实用新型的一种无接触式奶牛体尺信息采集装置,其结构如图1所示。整个采集设置于室内挤奶厅入口或出口处,保证单次仅一头奶牛通过,以提高图像采集的质量。
39.如图1所示,本实施例的采集装置包括主控模块13、门型支架、两个支撑脚架、两对行走轮、三个深度相机、三个滑轨模块和两个固定模块。
40.两个支撑脚架分别为第一支撑脚架21和第二支撑脚架22,两对行走轮分别为第一对行走轮11和第二对行走轮12,三个深度相机分别为第一深度相机d
1 3、第二深度相机d
2 6、以及第三深度相机d
3 7。
41.门型支架包括横梁5和两个立柱,两个立柱分别为第一立柱41和第二立柱42。
42.横梁5的侧面使用螺丝固定设置有主控模块13。主控模块13为该采集装置的主要逻辑分析、处理、以及控制单元,可选用stm8s105k6t6c。主控模块13与三个深度相机均相连,以控制三个深度相机工作并可获取三个深度相机拍摄的图像并进行数据分析、处理等以得到奶牛的体尺信息。主控模块13还可通过外接的无线传输单元接收来自手持式终端的命令,无线传输单元可选用wsn
‑
02(ttl)。该手持式终端一般为操作者所使用,通过无线传输单元向主控模块13下发各项指令,以控制采集装置实现奶牛体尺信息的采集。
43.第二深度相机d
2 6通过第一滑轨模块设置在横梁5上,第一滑轨模块的具体结构图如图2
‑
1所示。第一滑轨模块位于水平面内,且第一滑轨模块包括铝合金材质的第一滑轨
113和第二滑轨114,第一滑轨113使用螺丝固定于横梁5上且第一滑轨设置方向与横梁5方向平行,第一滑轨113上导向移动设置有第一滑轮,第一滑轮内嵌于第一滑轨113内,第一滑轮上设置有第二滑轨114,第二滑轨114上导向移动设置有第二滑轮,第二滑轮内嵌于第二滑轨114内,第二滑轨114与第一滑轨113在水平面内交叉设置,第二滑轮通过螺丝固定连接有第一木质板,第一木质板下方通过螺丝或强力胶固定有第二深度相机d
2 6。而且,第一滑轨113上设置有第一滑轨电机123和第二滑轨电机124,第一滑轨电机123驱动连接第一滑轮,第二滑轨电机124驱动连接第二滑轮,第一滑轨电机123和第二滑轨电机124均与主控模块13相连,以在主控模块13的控制下工作。其工作原理为:在主控模块13的控制下,驱动第一滑轨电机123可以带动第二滑轨114沿着第一滑轨113的方向往返滑动,驱动第二滑轨电机124可以带动第二深度相机d2沿着第二滑轨114的方向往返滑动,从而实现了第二深度相机d2拍摄位置的调整,使第二深度相机d2的视场范围覆盖目标奶牛的上侧,以完整拍摄到奶牛完整上部的深度图像。
44.第一深度相机d
1 3通过第二滑轨模块设置在第一立柱41上,第二滑轨模块的具体结构与第一滑轨模块类似,只是设置方向有所改变,如图2
‑
2所示。具体的:第二滑轨模块位于与水平面垂直的垂直平面内,且第二滑轨模块包括铝合金材质的第三滑轨111和第四滑轨112,第三滑轨111使用螺丝固定于第一立柱41上且第三滑轨设置方向与第一立柱41方向平行,第三滑轨111上导线移动设置有第三滑轮,第三滑轮内嵌于第三滑轨111内,第三滑轮上设置有第四滑轨112,第四滑轨112上导向移动设置有第四滑轮,第四滑轮内嵌于第四滑轨112内,第四滑轨112与第三滑轨111在垂直平面内交叉设置,第四滑轮通过螺丝固定连接有第二木质板,第二木质板下方通过螺丝或强力胶固定有第一深度相机d
1 3。而且,第三滑轨111上设置有第三滑轨电机121和第四滑轨电机122,第三滑轨电机121驱动连接第三滑轮,第四滑轨电机122驱动连接第四滑轮,第三滑轨电机121和第四滑轨电机122均与主控模块13相连,以在主控模块13的控制下工作。其工作原理为:在主控模块13的控制下,驱动第三滑轨电机121可以带动第四滑轨112沿着第三滑轨111的方向往返滑动,驱动第四滑轨电机122可以带动第一深度相机d
1 3沿着第四滑轨112的方向往返滑动,从而实现了第一深度相机d
1 3拍摄位置的调整。
45.第三深度相机d
3 7通过第三滑轨模块设置于第二立柱42上,第三滑轨模块的具体结构与第二滑轨模块类,只是设置的朝向不同。这里不再赘述。第一深度相机d1和第三深度相机d3的视场范围总和覆盖目标奶牛的两侧,以完整拍摄到奶牛完整两侧的深度图像。
46.进而,上述介绍的三个深度相机d1、d2和d3可以拍摄到覆盖奶牛完整身体区域的深度图像,进而利用覆盖奶牛完整身体区域的深度图像,可以构建出奶牛三维模型,利用奶牛三维模型可以确定奶牛体尺参数,包括奶牛身高、臀部宽度、运动能力等。
47.第一立柱41的底部通过第一固定模块设置有第一支撑脚架21,第一支撑脚架21的底部设置有第一对行走轮11;第二立柱的底部通过第二固定模块设置有第二支撑脚架22,第二支撑脚架22的底部设置有第二对行走轮12。这两对行走轮可以带动门型支架以及门型支架上设置的三个深度相机移动。各个行走轮由相应的行驶电机来驱动,且各个行驶电机由主控模块13来控制,其中,第二对行走轮12中的一个行走轮所对应的行驶电机为行驶电机9,其他的行驶电机在图1中未画出。行驶电机放置于比其体积稍大的小箱内,并通过螺丝将小箱固定于第二支撑脚架中间横梁外侧,以对行驶电机进行保护。第一固定模块和第二
固定模块的具体结构相同,下面以第一固定模块为为例来说明固定模块的具体结构。
48.第一固定模块包括第一支撑架圆环81(即支撑块),第一支撑架圆环81内部中空,通过螺丝与第一立柱41紧密相连。第一支撑架圆环81摆动装配有三个支撑杆101(图1中由于角度原因只显示出两个),三个支撑杆两两相距120
°
均匀地分布于第一支撑架圆环81上,且三个支撑杆的一端与第一支撑架圆环81通过连杆相连以实现每个支撑杆均能够沿着其与第一支撑架圆环81连接的一端做支点运动。每个支撑杆的摆动行程均具有一个支撑位,每个支撑杆均位于支撑位时每个支撑杆的另一端均位于地面上。其中一个支撑杆由支撑杆电机14来驱动实现做支点运动,其工作原理可参考一些停车场入口和出口处的栏杆的工作原理,这里不再赘述,其余支撑杆对应的支撑杆电机未在图1中画出。支撑杆电机14同样由主控模块13来控制,而且,支撑杆电机14同样放置于比其体积稍大的小箱内,并通过螺丝将小箱固定于第一支撑架圆环81外侧,以对支撑杆电机14进行保护。其工作原理为:在整个采集装置处于移动的状态时,每个支撑杆均处于竖直状态;在需要固定采集装置时,支撑杆电机14驱动三个支撑杆做支点运动,由竖直状态缓慢下放直至各个支撑杆的另一端接触到地面,以实现采集装置到达固定位置后的固定,避免因外在因素导致装置晃动而影响图像采集质量。三个支撑杆的使用借鉴了三角型的稳定性,能够有效固定整个采集装置。
49.本实施例中,总共设置了三个深度相机,横梁上设置了一个深度相机,一个立柱上设置一个深度相机。当然,在立柱上仅设置一个深度相机时,可能出现其视角范围无法完整覆盖奶牛的完整侧面,此时可在一个立柱上设置两个深度相机,使两个深度相机的视角范围总和能够完整覆盖奶牛的完整侧面。而且,在横梁上仅设置一个深度相机时,若其视角范围无法完整覆盖奶牛的完整上侧,可在横梁上设置两个深度相机,使两个深度相机的视角范围总和能够完整覆盖奶牛的完整上侧。因而,一个立柱上具体设置几个深度相机以及横梁上设置几个深度相机,可根据实际情况设定。其中,在横梁上设置一个深度相机(c1)、在每个立柱上设置两个深度相机(c2、c3、c4、c5)时,正视情况下、俯视情况下、以及侧视情况下各深度相机的视场范围示意图分别如图4
‑
1、4
‑
2、4
‑
3所示。
50.下面对深度相机的设置位置和所需深度相机个数进行详细说明。
51.为了获取得到奶牛完整体表点云,本实施例中选用d455深度相机,并根据其深度视场参数(86
°×
57
°
)、测距范围(0.2~6m)及奶牛体型参数范围(l
×
w
×
h),通过三角计算,得出系统所需相机个数及其摆放距离。计算过程如下:
52.为清楚描述采集装置的搭建过程,提供如下参数:奶牛的体长为l、体宽为w、体高为h,相机的水平视常角为θ1,竖直视场角为θ2,相机到奶牛体表的距离为x。
53.侧视情况下,依据奶牛的体长、体宽、体高、相机的视场角以及方程组(1)可以解得x的值。
[0054][0055]
式中,x1为水平视角下,相机可以拍摄完整奶牛体长的最小距离;x2为竖直视场角
下,相机可以拍摄完整奶牛体高的最小距离。其中,为了保证相机可以拍摄到完整的奶牛侧面图像,故x要取x1、x2的最大值。
[0056]
俯视情况下,依据奶牛的体长、体宽、体高、相机的视场角以及方程组(2)可以解得x的值。
[0057][0058]
式中,x3为水平视角下,相机可以拍摄完整奶牛体长的最小距离;x4为竖直视场角下,相机可以拍摄完整奶牛体宽的最小距离。其中,为了保证相机可以拍摄到完整的奶牛背部图像,故x要取x3、x4的最大值。
[0059]
以我国养殖量较大的荷斯坦奶牛为例:假定l等于2.4m,h等于1.5m,w等于0.7m。经计算可得,侧视相机与奶牛体表的最小距离为1.38m,俯视相机与奶牛体表的最小距离为1.29m。而为了拍摄到完整的奶牛图像,共需要安装三台d455相机,分别位于奶牛的左侧方(d1)、右侧方(d3)和正上方(d2)。又因奶牛个体差异,相机摆放时需留出一定阈值,最终确定左右两侧的相机距离奶牛中心点的距离均为1.8m,距离地面高度为0.75m,另一台相机摆放在奶牛中心正上方,距离地面2.85m处。整体由一个门型支架、3台d455深度相机和4个行走轮组成,且装置整体高2.92m,宽3.75m,两侧相机(d1,d3)均距地面0.73m,上方相机(d2)位于横梁中心,4个滑轮高均为12cm,其正视图、侧视图和俯视图分别如图3
‑
1、3
‑
2、3
‑
3所示。
[0060]
下面对整个采集装置的工作流程进行详细说明。
[0061]
1、操作者使用手持式终端,通过无线传输单元向采集装置的主控模块13下发行驶命令,主控模块13控制行驶电机驱动行走轮移动,且行驶速度固定。2、待整个采集装置到达指定位置(室内挤奶厅入口或出口处)后,手持式终端下发固定命令。主控模块13控制两个固定模块中的支撑杆电机正转,此时所有支撑杆均沿其固定于相应的支撑架圆环的一端做支点运动,即所有支撑杆由竖直状态缓慢下放至其另一端接触到地面,以实现采集装置到达指定位置后的固定,避免因外在因素导致装置晃动而影响图像采集质量。3、手持式终端下发调整相机拍摄角度命令,依据需要调整的深度相机的编号,主控模块13通过控制深度相机所在位置处的滑轨电机来实现深度相机位置的调整。例如,当需要调整第二深度相机d2时,主控模块13通过分别控制第一滑轨电机123和第二滑轨电机124实现第二深度相机d2两个方向的位置调整,以使深度相机调整至最佳位置。需要声明的是除特殊需要外,相机的位置调整均为在装置开发时设定的相机位置附近进行微调,以减少个体差异或奶牛种类等带来的采集质量的差异。
[0062]
4、完成上述步骤后,三个深度相机开始采集奶牛图像。待完成采集后,可依次下达收回固定模块命令、行驶命令,以实现采集装置返回原位,且在此过程中所有电机均为反转。
[0063]
本实施例中,第一滑轨电机和第二滑轨电机均设置在第一滑轨上,作为其他实施方式,第一滑轨电机和第二滑轨电机还可均设置在第二滑轨上,又或者,其中一个滑轨电机
设置在第一滑轨上,另一个滑轨电机设置在第二滑轨上,对滑轨电机设置的位置不做限制。同样的,本实施例中,第三滑轨电机和第四滑轨电机均设置在第三滑轨上,作为其他实施方式,第三滑轨电机和第四滑轨电机还可均设置在第四滑轨上,又或者,其中一个滑轨电机设置在第三滑轨上,另一个滑轨电机设置在第四滑轨上。
[0064]
本实施例中,主控模块设置在横梁上,这是采用了一种较佳的方式以实现整个采集装置的平衡与稳固。作为其他实施方式,主控模块还可设置在其中一个立柱上,也可基本实现采集装置的平衡与稳固。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。