1.本公开涉及焊缝检测技术领域,特别涉及一种环焊缝射线检测装置
背景技术:
2.在管道工程中常通过焊接技术连接多根管道,在管道焊接完成之后,需要对管道的环焊缝进行检测,如果环焊缝的检测结果不合格就需要重新焊接以确保焊接质量。
3.目前,管道环焊缝射线检测通常采用胶片成像方式。即在管道内设置射线源,在管道外设置胶片,射线源射出的射线会穿过焊缝至胶片上成像。
4.然而,在上述胶片成像方式中,胶片需要在暗室中冲洗显影,不能实时给出检测结果,从而导致检测效率较低。且上述胶片成像的方式得到的检测结果为图像,需要将形成有图像的胶片存放保存,以便于后续进行复核查验,但胶片存放成本高、难度大。一般在存放4-6年后,胶片易老化,原有的影像都会变色或褪色,造成无法再次查验底片。
技术实现要素:
5.本公开实施例提供了一种环焊缝射线检测装置,可以实时得到数字化的检测结果,提高检测效率,且便于后续对检测结果进行复核查验。所述技术方案如下:
6.本公开实施例提供了一种环焊缝射线检测装置,所述环焊缝射线检测装置包括轨道、成像面板、扫查器、射线源、控制器,所述轨道呈环形,用于套在管道上,所述成像面板安装在所述扫查器上,所述扫查器可移动地设置在所述轨道上;
7.所述射线源用于提供成像用的射线;
8.所述控制器,用于与上位机建立连接以接收控制指令,所述控制器被配置为,根据所述控制指令控制所述扫查器沿所述轨道移动、向所述上位机发送所述成像面板上形成的图像。
9.可选地,所述轨道包括圆弧状的本体、位于所述本体两端的接头和多个弹性垫片,所述本体两端的接头通过连接螺栓连接,所述多个弹性垫片位于所述本体的内壁上。
10.可选地,所述扫查器包括底板、以及分别设置在底板上的偏心轮机构、第一锁紧机构、第二锁紧机构和驱动机构;
11.所述偏心轮机构包括四个轮子,所述四个轮子呈矩阵布置在所述底板上,所述四个轮子包括第一偏心轮、第二偏心轮、主驱动轮和从动轮;
12.所述第一锁紧机构被配置为,调整所述第一偏心轮与所述主驱动轮之间的距离,使所述第一偏心轮和所述主驱动轮夹紧所述轨道;
13.所述第二锁紧机构被配置为,调整所述第二偏心轮与所述从动轮之间的距离,使所述第二偏心轮和所述从动轮夹紧所述轨道;
14.所述驱动机构被配置为,驱动所述主驱动轮转动。
15.可选地,所述第一锁紧机构和所述第二锁紧机构的结构相同;
16.所述第一锁紧机构包括转动杆、第一连杆、第二连杆和手柄,所述转动杆的一端铰
接在所述底板上,所述转动杆的另一端与所述第一连杆的一端铰接,所述第一连杆的另一端与所述第二连杆的一端铰接,所述第二连杆的另一端与所述第一偏心轮的转动轴连接,所述手柄连接在所述转动杆上。
17.可选地,所述驱动机构包括伺服电机,所述伺服电机的输出轴与所述主驱动轮的转动轴传动连接。
18.可选地,所述底板包括第一底板和第二底板,所述第一底板的一边和所述第二底板的一边铰接;所述第一偏心轮和所述主驱动轮设置在所述第一底板上,所述第二偏心轮和所述从动轮设置在所述第二底板上。
19.可选地,所述扫查器还包括曲率调整板,所述曲率调整板为等腰三角形板,所述曲率调整板的三个角上分别设有第一通孔、第二通孔和第三通孔,所述第一通孔内设有第一销轴、所述第二通孔内设有第二销轴、所述第三通孔内设有第三销轴,所述第一销轴与所述第一底板铰接,所述第二销轴与所述第二底板铰接,所述第一底板和所述第二底板之间通过所述第三销轴铰接。
20.可选地,所述扫查器上还设有面板支架,所述面板支架与所述底板固定连接,所述成像面板与所述面板支架之间可拆卸连接。
21.可选地,所述扫查器还包括高度调节机构,所述高度调节机构包括连接臂、两个连杆、两个套筒和锁紧螺母,所述连接臂与所述底板固定连接,所述两个套筒固定设置在所述连接臂上,所述连杆的一端与所述面板支架固定连接,所述连杆的另一端穿过所述套筒设置,且所述两个连杆垂直于所述面板支架设置,每个所述套筒上均设有一螺纹通孔,所述锁紧螺母设置在所述螺纹通孔中,所述连杆的另一端通过所述锁紧螺母锁紧在所述套筒中。
22.可选地,所述扫查器还包括设置在所述驱动机构和所述主驱动轮之间的减速机构。
23.本公开实施例提供的技术方案带来的有益效果至少包括:
24.通过提供一种环焊缝射线检测装置,该装置通过采用成像面板代替原有的胶片,当管道内的射线源发出的射线穿过焊缝射到成像面板上形成图像时,即可通过控制器将该图像转换成数据发送至上位机,由上位机将检测到的图像数据进行显示。同时还可以通过控制器接收上位机发送的控制指令,使得控制器可以根据该控制指令控制扫查器沿轨道移动,以带动成像面板围绕环焊缝一圈转动,实现管道环焊缝的动态连续检测,从而可以实时得到焊缝检测的数字化检测结果。且该检测结果可以由上位机进行存储,以便于后续对检测结果进行复核查验。
附图说明
25.为了更清楚地说明本公开实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本公开的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
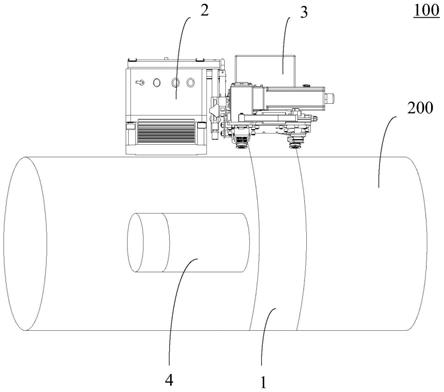
26.图1是本公开实施例提供的一种环焊缝射线检测装置的使用示意图;
27.图2是本公开实施例提供的一种轨道安装示意图;
28.图3是本公开实施例提供的一种扫查器的主视图;
29.图4是本公开实施例提供的一种底板的结构示意图;
30.图5是图3的a向视图;
31.图6是图3的b向视图;
32.图7是本公开实施例提供的一种扫查器的部分结构俯视图;
33.图8是本公开实施例提供的一种曲率调整板的结构示意图;
34.图9是本公开实施例提供的一种底板的弯曲结构图;
35.图10是本公开实施例提供的一种扫查器的部分结构示意图;
36.图11是本公开实施例提供的一种高度调节机构的原理示意图。
具体实施方式
37.为使本公开的目的、技术方案和优点更加清楚,下面将结合附图对本公开实施方式作进一步地详细描述。
38.图1是本公开实施例提供的一种环焊缝射线检测装置的使用示意图,如图1所示,该环焊缝射线检测装置用于检测管道的环焊缝。
39.环焊缝射线检测装置100包括轨道1、成像面板2、扫查器3、射线源4和控制器。
40.轨道1呈环形,用于套在管道200上,成像面板2安装在扫查器3上,扫查器3可移动地设置在轨道1上。
41.射线源4用于提供成像用的射线。
42.控制器用于与上位机建立连接以接收控制指令,控制器被配置为,根据控制指令控制扫查器3沿轨道1移动、向上位机发送成像面板2上形成的图像。
43.该装置通过采用成像面板代替原有的胶片,当管道内的射线源发出的射线穿过焊缝射到成像面板上形成图像时,即可通过控制器将该图像转换成数据发送至上位机,由上位机将检测到的图像数据进行显示。同时还可以通过控制器接收上位机发送的控制指令,使得控制器可以根据该控制指令控制扫查器沿轨道移动,以带动成像面板围绕环焊缝一圈转动,实现管道环焊缝的动态连续检测,从而可以实时得到焊缝检测的数字化检测结果。且该检测结果可以由上位机进行存储,以便于后续对检测结果进行复核查验。
44.在本实施例中,采用动态dr(digital radiography,数字x射线摄影术)检测原理对环焊缝进行检测。其中,射线源4发出x射线,成像面板为碲化镉平板探测器,即在玻璃板底基上固定有碲化镉半导体材料,将x射线信号直接转换成电信号,再由cmos(complementary metal oxide semiconductor,互补金属氧化物半导体)电路接收、处理成数字信号。
45.需要说明的是,在本实施例中,环焊缝射线检测装置100还可以包括传输模块,传输模块可以包括第一传输模块和第二传输模块。第一传输模块安装在扫查器中,第二传输模块安装在上位机中,第一传输模块和第二传输模块均为无线通讯单元,以便于数据传输。
46.示例性地,第一传输模块和第二传输模块之间可以通过3g/4g/5g网络、wifi或蓝牙等方式进行数据传输。
47.图2是本公开实施例提供的一种轨道安装示意图,如图2所示,轨道1包括圆弧状的本体1a、位于本体1a两端的接头1b和多个弹性垫片1c,本体1a两端的接头1b通过连接螺栓12连接,多个弹性垫片1c位于本体1a的内壁上。
48.在本实施例中,圆弧状的本体1a可以采用具有一定强度的钢带制作而成。多个弹性垫片1c可以通过螺栓固定在本体1a上。
49.在具体使用时,可以将圆弧状的本体1a围绕管道200设置,使得本体1a能够套设在管道200外的设定位置。然后将本体1a两端的接头1b通过连接螺栓12锁紧连接,并从四个测量点处分别测量轨道1与管道200之间的距离。其中,四个测量点为沿轨道1的周向依次间隔90
°
的四个测量点。接着,拧紧或拧松连接螺栓12,改变两个接头1b之间的距离,使得在四个测量点处,轨道1与管道200的外壁之间的距离均相等,轨道1能够跟随管道200的圆度与管道200紧密配合。此时,即可完成轨道1的安装,然后将扫查器3安装在轨道1上。当扫查器3沿轨道1转动一周时,能够保证成像面板2至管道200的外壁的距离始终一致,以保证最终检测结果的准确性。
50.在本实施例中,弹性垫片1c为中部向外凸起的弧形结构。多个弹性垫片1c位于轨道1和管道200之间,可以使得本体1a与管道200之间具有一定的间隔,便于安装扫查器3,同时,还可以使得轨道1具有一定的弹性变形量,能够更好的贴合管道200。
51.示例性地,在本实现方式中,环焊缝射线检测装置100包括四个弹性垫片1c,四个弹性垫片1c沿轨道1的周向依次间隔90
°
设置。
52.需要说明的是,对于不同管径的管道可以对应设置不同尺寸的轨道1,以适用于各种管径的管道。例如,本公开实施例提供的环焊缝射线检测装置适用于φ200~φ1422mm的钢质管道的环焊缝质量检测。此时可以设置轨道1的轴向长度为125mm,厚度为30mm。
53.图3是本公开实施例提供的一种扫查器的主视图,如图3所示,扫查器3包括底板31、以及分别设置在底板31上的偏心轮机构32、第一锁紧机构33、第二锁紧机构34(参见图5)和驱动机构35。
54.图4是本公开实施例提供的一种底板的结构示意图,如图4所示,底板31的四角设有呈矩阵分布的四个安装孔31a。
55.可选地,底板31上还设有多个螺纹孔,分别用于安装固定在底板31上的偏心轮机构32、第一锁紧机构33、第二锁紧机构34和驱动机构35。
56.图5是图3的a向视图,如图5所示,偏心轮机构32包括四个轮子,四个轮子呈矩阵布置在底板31上。四个轮子包括第一偏心轮321、第二偏心轮322、主驱动轮323和从动轮324。其中,四个轮子分别设置在四个安装孔31a中。
57.第一锁紧机构33被配置为,调整第一偏心轮321与主驱动轮323之间的距离,使第一偏心轮321和主驱动轮323夹紧轨道1。
58.第二锁紧机构34被配置为,调整第二偏心轮322与从动轮324之间的距离,使第二偏心轮322和从动轮324夹紧轨道1。
59.需要说明的是,在本实施例中,四个轮子的周向均设有用于安装轨道1的凹槽32a(参见图3)。当夹紧轨道时,轨道1位于四个轮子的凹槽32a中。
60.驱动机构35被配置为驱动主驱动轮323转动。
61.在具体使用时,可以通过控制第一锁紧机构33和第二锁紧机构34,分别使得第一偏心轮321与主驱动轮323夹紧轨道1、使得第二偏心轮322与从动轮324夹紧轨道1。然后再控制驱动机构驱动主驱动轮323转动,带动第一偏心轮321、第二偏心轮322和从动轮324沿轨道1周向移动,实现扫查器3绕轨道1一圈转动。
62.可选地,驱动机构35为伺服电机,伺服电机的输出轴与主驱动轮323的转动轴传动连接。驱动机构35与控制器连接,控制器用于根据控制指令控制伺服电机驱动主驱动轮323转动。通过输入不同的控制指令,即可控制主驱动轮323的转动速度,从而控制扫查器3沿轨道1转动的转动速度,保证扫查器3能够沿轨道1进行圆周行走,完成动态检测任务。
63.图6是图3的b向视图,如图6所示,在本实施例中,扫查器3还包括设置在底板31上的供电电源36。供电电源用于为扫查器3中的各用电器件供电。例如,可以为伺服电机供电,以驱动主驱动轮323转动。
64.可选地,如图6所示,扫查器3还包括设置在驱动机构35和主驱动轮323之间的减速机构30。
65.可选地,减速机构30包括行星减速器和涡轮蜗杆减速器(图中未示出)。其中,行星减速器与伺服电机的输出轴传动连接,涡轮蜗杆减速器与行星减速器传动连接,蜗轮蜗杆减速器的输出轴与主驱动轮323的转动轴传动连接。
66.示例性地,可以设置减速机构30的减速比可以为322:1。
67.在本实施例中,可以根据上位机发出的控制信号控制驱动机构35转动,例如,控制驱动机构35的功率为90w。驱动机构35与减速机构30相连,此时减速机构30的力矩大,可以保证扫查器3的行走平稳,动态检测检测图像质量好,驱动机构35的高速旋转经过驱动机构35后带动主驱动轮323旋转,使得扫查器3在轨道1上行走。
68.图7是本公开实施例提供的一种扫查器的部分结构俯视图,如图7所示,在本实施例中,第一锁紧机构33和第二锁紧机构34的结构相同。
69.第一锁紧机构33包括第一转动杆331、第一连杆332、第二连杆333和第一第一手柄331a。第一转动杆331的一端铰接在底板31上,第一转动杆331的另一端与第一连杆332的一端铰接,第一连杆332的另一端与第二连杆333的一端铰接,第二连杆333的另一端与第一偏心轮321的转动轴连接,第一手柄331a连接在第一转动杆331上。
70.在本实施例的一种实现方式中,如图7所示,通过顺时针转动第一锁紧机构33中的第一手柄331a,即可拉动第一连杆332和第二连杆333,使得第一偏心轮321顺时针转动,此时第一偏心轮321与主驱动轮323之间的距离变小,第一偏心轮321与主驱动轮323夹紧轨道1。
71.通过逆时针转动第一锁紧机构33中的第一手柄331a,即可拉动第一连杆332和第二连杆333,使得第一偏心轮321逆时针转动,此时第一偏心轮321与主驱动轮323之间的距离变大,轨道脱离第一偏心轮321或主驱动轮323的凹槽中。
72.同样地,第二锁紧机构34包括第二转动杆341、第三连杆342、第四连杆343和第二手柄341a。第二转动杆341的一端铰接在底板31上,第二转动杆341的另一端与第三连杆342的一端铰接,第三连杆342的另一端与第四连杆343的一端铰接,第四连杆343的另一端与第二偏心轮322的转动轴连接,第二手柄341a连接在第二转动杆341上。
73.在本实施例的一种实现方式中,通过逆时针转动第二锁紧机构34中的第二手柄341a,即可拉动第三连杆342和第四连杆343,使得第二偏心轮322逆时针转动,此时第二偏心轮322与从动轮324之间的距离变小,第二偏心轮322与从动轮324夹紧轨道1。
74.通过顺时针转动第二锁紧机构34中的第二手柄341a,即可拉动第二连杆342和第四连杆343,使得第二偏心轮322顺时针转动,此时第二偏心轮322与从动轮324之间的距离
transistor logic,晶体管-晶体管逻辑电平)电平信号。
91.以下结合图1简单说明下本公开实施例提供的一种环焊缝射线检测装置的使用方法:
92.1、将轨道1安装管道200上。
93.2、将射线源4放置在管道200中,保证射线源4射出的射线能够穿过管道200;
94.3、将成像面板2安装固定在面板支架38上。
95.4、将扫查器3放置在轨道1上方,锁紧第一锁紧机构33和第二锁紧机构34,使轨道1位于第一偏心轮321和主驱动轮323的凹槽中,且第一偏心轮321和主驱动轮323夹紧轨道1,使轨道1位于第二偏心轮322和从动轮324的凹槽中,且第二偏心轮322和从动324轮夹紧轨道1。
96.5、接收上位机发送的控制指令,使控制器根据控制指令控制驱动机构35,驱动主驱动轮323转动,带动第一偏心轮321、第二偏心轮322和从动324沿轨道1周向移动。
97.6、由控制器控制成像面板2采集射线源4在成像面板2上形成的图像,并将图像转换成数据发送至传输模块。
98.7、由控制器将数据传输至上位机,使上位机将数据进行存储、显示。
99.其中,本公开实施例提供的环焊缝射线检测装置采用目前最先进的数字成像技术,在检测信息量、图像灰度等级、远程传送、方便实用等方面都比常规的胶片成像方式更胜一筹,可以满足常规检测的技术要求。
100.经施工现场工业应用试验证明,本公开实施例提供的环焊缝射线检测装置应用于管道环焊缝检测中,不仅可以满足相关检测标准要求,且检测缺陷准确、检测过程安全可靠。
101.本领域普通技术人员可以理解实现上述实施例的全部或部分步骤可以通过硬件来完成,也可以通过程序来指令相关的硬件完成,所述的程序可以存储于一种计算机可读存储介质中,上述提到的存储介质可以是只读存储器,磁盘或光盘等。
102.以上所述仅为本公开的可选实施例,并不用以限制本公开,凡在本公开的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本公开的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。