基于3d视觉的压缩机气缸座自动上下料系统
技术领域
1.本实用新型涉及机械智能控制领域,特别是一种基于3d视觉的压缩机气缸座自动上下料系统。
背景技术:
2.随着工业自动化水平逐渐提升,基于3d视觉的上下料系统逐步应用到工业场景中。目前,压缩机气缸座的上下料、分拣与装配主要靠人工完成,劳动强度大、自动化水平低。
3.现有技术中,上下料机器人和装配机器人之间的放置台只能根据工序依次供料,在上下料机器人上下料的过程中,浪费了时间,为此因此,我们提出一种基于3d视觉的压缩机气缸座上下料系统对解放劳动力、降低生产成本、提高工作效率具有重要意义。
技术实现要素:
4.本实用新型要解决的技术问题是针对上述现有技术的不足,而提供一种基于3d视觉的压缩机气缸座自动上下料系统,该基于3d视觉的压缩机气缸座自动上下料系统根据气缸座状态准确抓取装配,最终送至传输带上。
5.为解决上述技术问题,本实用新型采用的技术方案是:一种基于3d视觉的压缩机气缸座自动上下料系统,包括装备机器人、放置台、3d相机以及传输带;装备机器人包括上下料机器人和装配机器人;传输带一侧安装有上下料机器人,传输带另一侧安装有装配机器人,其中上下料机器人一侧设有上料台,上下料机器人另一侧设有下料台;放置台设置于传输带靠近上下料机器人一侧;上料台上设有料框,下料台上设有料框回收区域,所述料框内装载有气缸座;放置台上滑动连接有两个供料滑台,供料滑台上均设有料框放置槽,供料滑台包括供料滑台一和供料滑台二,其中供料滑台一高度大于供料滑台二,供料滑台二能在供料滑台一下方滑移;放置台的上方设有3d相机,所述3d相机包括工业相机、结构光和上位机,所述上位机与装备机器人通信连接。
6.进一步地,所述供料滑台二侧壁连接于气缸的活塞杆,供料滑台二和供料滑台一之间通过传动带和滑动滚轮连接。
7.进一步地,所述上下料机器人输出轴上连接有用于抓取料框的上料夹手,所述机器人固定在上下料机器人底座上,上下料机器人底座固定安装在地面上。
8.进一步地,所述装配机器人的输出轴上连接有用于抓取气缸座的装配夹手,所述装配机器人固定在装配机器人底座上,装配机器人底座固定安装在地面上。
9.进一步地,所述3d相机顶端固定在相机支架上一端,相机支架另一端固定在放置台。
10.进一步地,所述传输带上设有装配台,传输带两侧安装有红外传感器。
11.本实用新型具有如下有益效果:
12.上下料机器人将料框送至放置台,设于放置台上方3d视觉单元对料框中压缩机气
缸座状态信息采集,装备机器人根据气缸座状态准确抓取装配,最终送至传输带上,抓取过程快速、准确。通过机器人与3d结合的压缩机气缸座上下料系统自动化程度高、降低生产成本、提高工作效率。
13.通过设置相对滑移的供料滑台,实用3d相机采集供料滑台上料框内的气缸座信息并进行判断,并使得供料滑台带动料框相对滑移,从而实现了气缸座在放置台上进行的供料操作。
附图说明
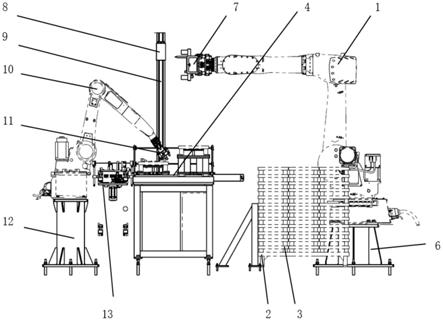
14.图1为本实用新型基于3d视觉的压缩机气缸座自动上下料系统的正视图。
15.图2为本实用新型基于3d视觉的压缩机气缸座自动上下料系统的俯视图。
16.图3为本实用新型基于3d视觉的压缩机气缸座自动上下料系统的放置台结构图。
17.图4为本实用新型基于3d视觉的压缩机气缸座自动上下料系统的放置台俯视图。
18.图5为本实用新型基于3d视觉的压缩机气缸座自动上下料系统的传输带俯视图。
19.其中有:
20.1、上下料机器人;2、上料台;3、料框;4、放置台;5、下料台;6、上下料机器人底座;7、上料夹手;8、3d相机;9、相机支架;10、装配机器人;11、装配夹手;12、装配机器人底座;13、传输带;14、气缸座;15、滑动滚轮;16、装配台;17、红外传感器;18、供料滑台一;19、供料滑台二;20、气缸。
具体实施方式
21.下面结合附图和具体较佳实施方式对本实用新型作进一步详细的说明。
22.本实用新型的描述中,需要理解的是,术语“左侧”、“右侧”、“上部”、“下部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,“第一”、“第二”等并不表示零部件的重要程度,因此不能理解为对本实用新型的限制。本实施例中采用的具体尺寸只是为了举例说明技术方案,并不限制本实用新型的保护范围。
23.如图1
‑
4所示,一种基于3d视觉的压缩机气缸座自动上下料系统,包括装备机器人、放置台4、3d相机8以及传输带13;装备机器人包括上下料机器人1和装配机器人10;传输带13一侧安装有上下料机器人1,传输带13另一侧安装有装配机器人10,其中上下料机器人1一侧设有上料台2,上下料机器人1另一侧设有下料台5;放置台4设置于传输带13靠近上下料机器人1一侧;上料台2上设有料框3,下料台5上设有料框3回收区域,所述料框3内装载有气缸座14;放置台4上滑动连接有两个供料滑台,供料滑台上均设有料框3放置槽,供料滑台包括供料滑台一18和供料滑台二19,其中供料滑台一18高度大于供料滑台二19,供料滑台二19能在供料滑台一18下方滑移;放置台4的上方设有3d相机8,所述3d相机8包括两个工业相机、一个用于向气缸座投射结构光的结构光发生器和上位机,两个工业相机对称布设在结构光发生器两侧,且工业相机通过上位机与装备机器人通信连接,通过结构光发生器与工业相机结合方式获取气缸座状态信息,并通过上位机转换为机器人可执行操作。
24.供料滑台二19侧壁连接于气缸20的活塞杆,供料滑台二19和供料滑台一18之间通
过传动带和滑动滚轮15连接。具体来讲,两个料框位置分别通过供料滑台一和供料滑台二带动相互移动,滑动滚轮依据3d相机采集料框中的数据,判断的气缸座有无,从而判断是否移动供料滑台一和供料滑台二位置,当料框内气缸座装配完成后料框内无气缸座时,气缸和滑动滚轮带动供料滑台一和供料滑台二发生相对移动,装满气缸座的料框移至靠近装配机器人处,将空料框移至靠近上下料机器人处,上下料机器人重新上下料,提高工作效率。
25.上下料机器人1输出轴上连接有用于抓取料框3的上料夹手7,所述机器人1固定在上下料机器人底座6上,上下料机器人底座6固定安装在地面上;装配机器人10的输出轴上连接有用于抓取气缸座14的装配夹手11,所述装配机器人10固定在装配机器人底座12上,装配机器人底座12固定安装在地面上。具体来讲,上下料机器人通过连接在输出轴上的夹手从上料台抓取装满气缸座的料框置于放置台上,位于放置台上的3d视觉单元分析料框与气缸座的状态信息;控制系统将气缸座的状态信息转换为装备机器人的可执行操作,引导连接在输出轴上的夹手对气缸座准确快速抓取装配,同时,上下料机器人根据料框中有无气缸座进行上料和下料操作。
26.如图5所示,传输带13上设有装配台16,传输带13两侧安装有红外传感器17,根据红外传感器定位,装配台通过传输带传输到指定位置后,通过装配机器人将气缸座装配在压缩机,装配完成后通过传输带进行传输。
27.以上详细描述了本实用新型的优选实施方式,但是,本实用新型并不限于上述实施方式中的具体细节,在本实用新型的技术构思范围内,可以对本实用新型的技术方案进行多种等同变换,这些等同变换均属于本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。