1.本技术涉及检测设备技术领域,尤其是涉及一种水平调整系统。
背景技术:
2.式样的部分强度测试中,需要使用千斤顶和拉力环,测试过程中,检测平台可能会出现倾斜的现象,这就导致测试结果不准确。
技术实现要素:
3.本技术实施例提供一种水平调整系统,可以在检测过程中进行对水平度进行动态调整。
4.本技术实施例的上述目的是通过以下技术方案得以实现的:
5.本技术实施例提供了一种水平调整系统,包括:
6.底座;
7.多个伸缩臂,设在底座上;
8.半球体,设在伸缩臂的工作端上;
9.水平工作台,其底面上设有多个半球形托槽,半球体抵接在与之对应的半球形托槽的内壁上;
10.第一调整板,设在水平工作台的底面上;
11.两组第一反射器,对称设在第一调整板上;
12.两组第一信号传感器,设在底座上,其工作端分别朝向与之对应的第一反射器;
13.第二调整板,设在水平工作台的底面上;
14.两组第二反射器,对称设在第二调整板上;
15.两组第二信号传感器,设在底座上,其工作端分别朝向与之对应的第二反射器;以及
16.控制器,用于与第一信号传感器、第二信号传感器和伸缩臂进行数据交互。
17.在本技术实施例的一种可能的实现方式中,所述第一信号传感器为激光传感器。
18.在本技术实施例的一种可能的实现方式中,所述第二信号传感器为激光传感器。
19.在本技术实施例的一种可能的实现方式中,所述伸缩臂的数量为两组,每组中伸缩臂的数量为两个。
20.在本技术实施例的一种可能的实现方式中,所述第一反射器的工作面包括第一工作面和第二工作面;
21.第二工作面的面积小于第一工作面的面积。
22.在本技术实施例的一种可能的实现方式中,所述第二反射器的工作面包括第三工作面和第四工作面;
23.第四工作面的面积小于第三工作面的面积。
附图说明
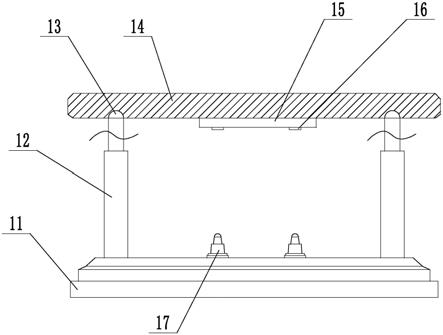
24.图1是本技术实施例提供的一种水平调整系统的主视图。
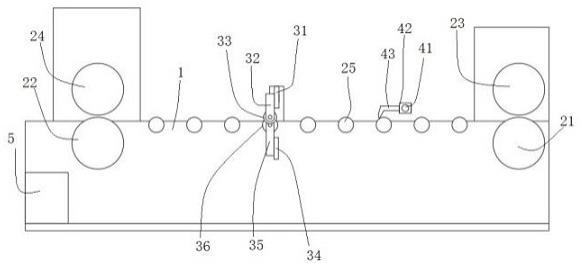
25.图2是基于图1给出的左视图。
26.图3是本技术实施例提供的一种水平工作台的结构示意图。
27.图4是本技术实施例提供的一种信号传感器的工作原理示意图。
28.图5是本技术实施例提供的另一种信号传感器的工作原理示意图。
29.图6是本技术实施例提供的一种第一反射器的工作面的形状示意图。
30.图7是本技术实施例提供的一种第二反射器的工作面的形状示意图。
31.图8是本技术实施例提供的一种控制器的结构示意框图。
32.图中,11、底座,12、伸缩臂,13、半球体,14、水平工作台,15、第一调整板,16、第一反射器,17、第一信号传感器,18、第二调整板,19、第二反射器,20、第二信号传感器,141、半球形托槽,161、第一工作面,162、第二工作面,191、第三工作面,192、第四工作面,6、控制器,601、cpu,602、ram,603、rom,604、系统总线。
具体实施方式
33.以下结合附图,对本技术中的技术方案作进一步详细说明。
34.请参阅图1和图2,为本技术实施例公开的一种水平调整系统,该系统主要由底座11、伸缩臂12、半球体13、水平工作台14、第一调整板15、第一反射器16、第一信号传感器17、第二调整板18、第二反射器19、第二信号传感器20和控制器6等组成,底座11用于放置在水平面上或者测试台架上,其上安装有多个伸缩臂12,伸缩臂12的作用是调整水平工作台14的水平度。
35.每一个伸缩臂12的工作端上均固定有一个半球体13,对应的,请参阅图3,水平工作台14的底面上设有多个半球形托槽141,半球体13与半球形托槽141的内壁接触,在伸缩臂12的工作端升降的过程中,半球体13与半球形托槽141会发生相对移动,进而,水平工作台14的水平度也会发生变化。
36.在一些可能的实现方式中,伸缩臂12的数量为四个,水平工作台14的形状为正方形,其四个角处分别设置有一个半球形托槽141。
37.水平工作台14的底面上设置有一个第一调整板15和一个第二调整板18这两个调整板是互相垂直的,第一调整板15上安装有两组第一反射器16,底座11上安装了两组与第一反射器16对应的第一信号传感器17。
38.请参阅图4和图5,工作过程中,两组第一信号传感器17同时发出信号,该信号经过第一反射器16的反射后被第一信号传感器17检测到。当水平工作台14发生倾斜时,两组第一信号传感器17中至少有一组无法接收到信号,此时,与之对应的伸缩臂12就会开始伸长或者缩短,使水平工作台14恢复到水平状态。
39.第二调整板18上安装有两组第二反射器19,底座11上安装了与两组第二反射器19对应的两组第二信号传感器20,工作过程中,两组第二信号传感器20同时发出信号,该信号经过第二反射器19的反射后被第二信号传感器20检测到。当水平工作台14发生倾斜时,两组第二信号传感器20中至少有一组无法接收到信号,此时,与之对应的伸缩臂12就会开始伸长或者缩短,使水平工作台14恢复到水平状态。
40.第一信号传感器17、第二信号传感器20和伸缩臂12均由控制器6进行控制,控制器6内存储有程序,调整过程中,控制器6会根据第一信号传感器17与第二信号传感器20的反馈来控制伸缩臂12的伸长和缩短。
41.在一些可能的实现方式中,伸缩臂12使用电缸。
42.在一些可能的实现方式中,第一反射器16和第二反射器19使用平面反光镜。
43.整体而言,本技术实施例提供的水平调整系统,能够在使用过程中对水平工作台14的姿态进行动态调整,调整过程中,不会影响测试过程的进行,并且,还能够在整个测试过程中对水平工作台14的姿态进行监控,使水平工作台14始终能够保持在水平的状态。
44.作为申请提供的水平调整系统的一种具体实施方式,第一信号传感器17使用激光传感器,激光传感器的光束直径小,精度高,可以使水平工作台14的姿态发生轻微变化时就能够被检测到。
45.作为申请提供的水平调整系统的一种具体实施方式,第二信号传感器20使用激光传感器,激光传感器的光束直径小,精度高,可以使水平工作台14的姿态发生轻微变化时就能够被检测到。
46.作为申请提供的水平调整系统的一种具体实施方式,伸缩臂12的数量为两组,每组中伸缩臂12的数量为两个,这样,就将水平工作台14的姿态调整简化为了围绕两根相互垂直的轴线转动,调整过程中考虑的参数更少,各参数之间的影响程度也能够下降,可以使调整过程更加简单。
47.请参阅图6,作为申请提供的水平调整系统的一种具体实施方式,第一反射器16的工作面由第一工作面161和第二工作面162两部分组成,第二工作面162位于第一工作面161上,并且,第二工作面162的面积小于第一工作面161的面积。
48.通过这样的结构,可以将第一反射器16的工作面进一步的缩小,有助于提高水平工作台14姿态的调整精度,也可以使伸缩臂12的反应更加灵敏。
49.进一步地,相对于第二工作面162而言,第一工作面161是斜面,也就是第一信号传感器17发出的信号经由第二工作面162反射后,无法被第一信号传感器17感知。
50.请参阅图6,作为申请提供的水平调整系统的一种具体实施方式,第二反射器19的工作面由第三工作面191和第四工作面192两部分组成,第四工作面192位于第三工作面191上,并且,第四工作面192的面积小于第三工作面191的面积。
51.通过这样的结构,可以将第二反射器19的工作面进一步的缩小,有助于提高水平工作台14姿态的调整精度,也可以使伸缩臂12的反应更加灵敏。
52.进一步地,相对于第四工作面192而言,第三工作面191是斜面,也就是第二信号传感器20发出的信号经由第四工作面192反射后,无法被第二信号传感器20感知。
53.请参阅图8,应理解,控制器6可以是一个cpu,微处理器,asic,或一个或多个用于控制上述内容的程序执行的集成电路。
54.控制器6主要有cpu601、ram602、rom603和系统总线604等组成,其中cpu601,ram602和rom603均连接在系统总线604上。
55.第一信号传感器17和第二信号传感器20使用通讯电路连接在系统总线604上,伸缩臂12使用控制电路连接在系统总线604上。
56.本具体实施方式的实施例均为本技术的较佳实施例,并非依此限制本技术的保护
范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。