1.本实用新型涉及机器人技术领域,具体涉及一种机器人用管线包。
背景技术:
2.机器人是一种能够半自主或全自主工作的智能机器。历史上最早的机器人见于隋炀帝命工匠按照柳抃形象所营造的木偶机器人,施有机关,有坐、起、拜、伏等能力,管线包对机器人来讲是身体必不可少的一部分,是它的“神经”与“血管”,作为传递动力和控制能力的载体和重要部件,将机器人的各个器官完整的连接起来。主要是用于拓展机器人终端执行器上的应用范畴而定制开发的一套线束系统。该线束系统具备满足设备应用的功能、具有较好的使用寿命、能够尽量不去限制机器人的运动范围、便于安装与维修等特点。
3.目前,现有的机器人用管线包一般只是具有线束功能,而机器人的机械臂等地方会进行灵活的百度从而完成需要的工作,但是管线包只能将电线束缚在机器人的机器臂上,当机械臂进行工作时管线包束缚住的电线会因为活动的机械臂被进行各种拉扯,从而导致电线会出现各种磨损。
技术实现要素:
4.针对现有技术的不足,本实用新型提供一种机器人用管线包,该设计方案具备无论机械臂如何活动其束缚住电线的管线包都不会跟随一起活动的优点,解决了管线包只能将电线束缚在机器人的机器臂上,当机械臂进行工作时管线包束缚住的电线会因为获得的机械臂被进行各种拉扯,从而导致电线会出现各种磨损的问题。
5.本实用新型的一种机器人用管线包,包括左侧固定夹和左侧环形卡块;左侧固定夹顶部的右侧固定连接有第一合叶,第一合叶的右侧固定连接有右侧固定夹,右侧固定夹与左侧固定夹相互靠近的一侧开设有半圆形空槽,左侧固定夹与右侧固定夹块身中央的半圆形空槽内均绕半圆等距离固定连接有第一复位弹簧,第一复位弹簧远离左侧固定夹与右侧固定夹的一侧固定连接有橡胶软板,左侧固定夹块身左侧的中央固定连接有转动连接块;左侧环形卡块顶部的右侧固定连接有第二合叶,第二合叶远离左侧环形卡块的一侧固定连接有右侧环形卡块,左侧环形卡块与右侧环形卡块底部相互靠近的一侧均固定连接有空心块,右侧环形卡块块身右侧的中央螺纹连接有铰链。
6.作为本实用新型的进一步改进,右侧环形卡块块身右侧的中央固定连接有螺纹柱,铰链左侧中央的块身上固定连接有螺纹套筒,该螺纹柱与螺纹套筒之间螺纹连接。
7.通过上述技术方案设计,方便工作人员根据需要更换不同大小的右侧环形卡块与左侧环形卡块。
8.作为本实用新型的进一步改进,左侧环形卡块底部空心块块身的中央活动插接有插柱,右侧环形卡块底部空心块块身左侧的中央设有插接槽,该插柱与插接槽之间活动插接在一起。
9.通过上述技术方案设计,左侧环形卡块与右侧环形卡块能插接在一起。
10.作为本实用新型的进一步改进,左侧固定夹块身内腔右侧的底部活动插接有活动块,活动块块身的顶部且位于左侧固定夹内腔的一侧固定连接有活动卡块,活动卡块靠近活动块一侧的杆身上固定连接有限位板;活动卡块靠近活动块一侧的杆身上活动套接有第二复位弹簧,第二复位弹簧的顶部与限位板之间固定连接;右侧固定夹块身底部的左侧固定连接有固定卡块,固定卡块与活动卡块位于同一水平面。
11.通过上述技术方案设计,左侧固定夹与右侧固定夹能相互卡接在一起。
12.与现有技术相比,本实用新型的有益效果如下:
13.1、本实用新型通过左侧固定夹与右侧固定夹以及第一合叶之间的结构设计,能使左侧固定夹与右侧固定夹可以将电线夹住,同时通过左侧环形卡块与右侧环形卡块以及第二合叶之间的结构设计,能将使该装置可以夹在机器人的机械臂上,再通过转动连接块与铰链之间的结构设计,能使该机器人用管线包可以将电线束缚在机器人的机械臂上,同时机械臂进行工作和活动时电线可以最大程度的不跟随机械臂进行弯折和拉扯,从而达到减少电线的各种损耗的目的。
14.2、本实用新型通过两个空心块内分别设计的插柱和插接槽的结构设计,能方便工作人员将左侧环形卡块与右侧环形卡块固定套接在机器人的机械臂上,再通过限位板与活动块以及第二复位弹簧之间的结构设计,能够使活动卡块可以在被按压进行位移后自动回到原来的位置,而通过固定卡块的结构设计,能使活动卡块与固定卡块之间可以相互卡接在一起,从而使左侧固定夹与右侧固定夹能夹住电线,从而达到能将电线与机器人的机械臂线束在一起的目的。
附图说明
15.此处所说明的附图用来提供对本技术的进一步理解,构成本技术的一部分,本技术的示意性实施例及其说明用于解释本技术,并不构成对本技术的不当限定。在附图中:
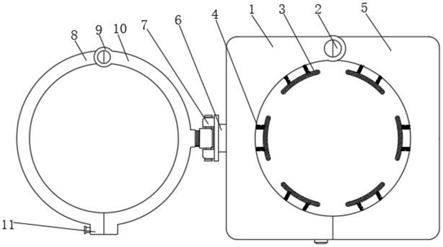
16.图1为本实用新型正面整体结构示意图;
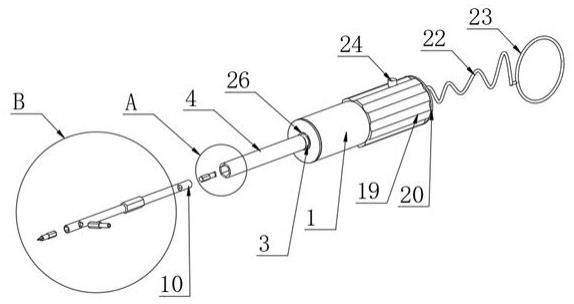
17.图2为本实用新型左侧固定夹与右侧固定夹正面剖视结构示意图;
18.图3为本实用新型图2的a处结构示意图。
19.图中:1、左侧固定夹;2、第一合叶;3、橡胶软板;4、第一复位弹簧;5、右侧固定夹;6、转动连接块;7、铰链;8、左侧环形卡块;9、第二合叶;10、右侧环形卡块;11、空心块;12、活动块;13、第二复位弹簧;14、限位板;15、活动卡块;16、固定卡块。
具体实施方式
20.以下将以图式揭露本实用新型的多个实施方式,为明确说明起见,许多实务上的细节将在以下叙述中一并说明。然而,应了解到,这些实务上的细节不应用以限制本实用新型。也就是说,在本实用新型的部分实施方式中,这些实务上的细节是非必要的。此外,为简化图式起见,一些习知惯用的结构与组件在图式中将以简单的示意的方式绘示之。
21.另外,在本实用新型中如涉及“第一”、“第二”等的描述仅用于描述目的,并非特别指称次序或顺位的意思,亦非用以限定本实用新型,其仅仅是为了区别以相同技术用语描述的组件或操作而已,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特
征。另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本实用新型要求的保护范围之内。
22.请参阅图1
‑
3,本实用新型的一种机器人用管线包,包括左侧固定夹1和左侧环形卡块8;左侧固定夹1顶部的右侧固定连接有第一合叶2,第一合叶2的右侧固定连接有右侧固定夹5,右侧固定夹5与左侧固定夹1相互靠近的一侧开设有半圆形空槽,左侧固定夹1与右侧固定夹5块身中央的半圆形空槽内均绕半圆等距离固定连接有第一复位弹簧4,第一复位弹簧4远离左侧固定夹1与右侧固定夹5的一侧固定连接有橡胶软板3,左侧固定夹1块身左侧的中央固定连接有转动连接块6;左侧环形卡块8顶部的右侧固定连接有第二合叶9,第二合叶9远离左侧环形卡块8的一侧固定连接有右侧环形卡块10,左侧环形卡块8与右侧环形卡块10底部相互靠近的一侧均固定连接有空心块11,右侧环形卡块10块身右侧的中央螺纹连接有铰链7。
23.请参阅图1,右侧环形卡块10块身右侧的中央固定连接有螺纹柱,铰链7左侧中央的块身上固定连接有螺纹套筒,该螺纹柱与螺纹套筒之间螺纹连接,该设计有益于方便工作人员根据需要更换不同大小的右侧环形卡块10与左侧环形卡块8。左侧环形卡块8底部空心块11块身的中央活动插接有插柱,右侧环形卡块10底部空心块11块身左侧的中央设有插接槽,该插柱与插接槽之间活动插接在一起,该设计有益于左侧环形卡块8与右侧环形卡块10能插接在一起。
24.请参阅图2
‑
3,左侧固定夹1块身内腔右侧的底部活动插接有活动块12,活动块12块身的顶部且位于左侧固定夹1内腔的一侧固定连接有活动卡块15,活动卡块15靠近活动块12一侧的杆身上固定连接有限位板14;活动卡块15靠近活动块12一侧的杆身上活动套接有第二复位弹簧13,第二复位弹簧13的顶部与限位板14之间固定连接;右侧固定夹5块身底部的左侧固定连接有固定卡块16,固定卡块16与活动卡块15位于同一水平面,该设计有益于左侧固定夹1与右侧固定夹5能相互卡接在一起。
25.在使用本实用新型时,工作人员先将拉动插柱将其从插接槽内取出,并转动左侧环形卡块8以及右侧环形卡块10使其分开,并套在机器人的机械臂上并合拢再次将插柱将其插在插接槽内,此时工作人员将需要进行束缚的电线合拢在一起,并推动活动块12使其推动活动卡块15向上活动,不在于固定卡块16相互卡接在一起,此时打开左侧固定夹1与右侧固定夹5使其分开并将合拢夹在电线上,并在左侧固定夹1靠近右侧固定夹5时按动活动块12使其向上活动从而使固定卡块16能位于活动卡块15的底部,此时松开活动块12使其在第二复位弹簧13的作用活动卡块15会持续向下活动,从而使活动卡块15与固定卡块16能相互卡接在一起,从而将电线束缚住使电线能被束缚在机械臂的一旁,当机械臂进行转动或弯折时,而通过铰链7与转动连接块6能使机械臂弯折时被束缚的电线可以进行独立活动,从而使电线不会跟随一起弯折减少电线的磨损。
26.以上所述仅为本实用新型的实施方式而已,并不用于限制本实用新型。对于本领域技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原理的内所作的任何修改、等同替换、改进等,均应包括在本实用新型的权利要求范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。