1.本发明涉及一种采用液压进行托举的客滚船汽车接驳装置,属于客滚船中的汽车接驳领域。
背景技术:
2.随着我国经济的快速增长,进出口贸易量的增加,对码头的接卸能力及吞吐的需求量也日益增加。然而,近年来我国渤海区域实施严格的围填海管控措施,港口建设固定式的港工设施受到限制。
3.目前,对于大型客滚船运输的车辆需通过码头固定的下车平台完成上岸动作。在严格管控的背景下,为解决新码头大型客滚船运输车辆的上岸问题,需采用具有同样功能的移动式装置代替,并保证车辆在上岸过程的稳定性。
技术实现要素:
4.为解决上述问题,本发明提供一种可操控液压托举式客滚船接驳装置,旨在达到在有限的码头空间下,可对大型车辆进行接驳,并且保证接驳平稳性的作用和效果,其所采用的技术方案是:
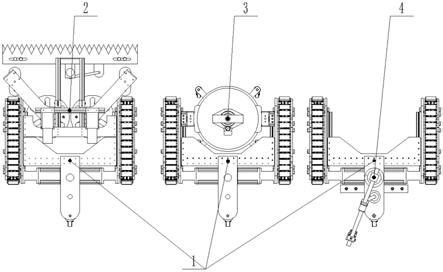
5.一种可操控液压托举式客滚船接驳装置,有接驳浮体,所述接驳浮体甲板上方依次固定有下船平台和转盘架,所述下船平台一侧与所述转盘架铰接,另一侧与第一多级液压缸、第二多级液压缸滑动连接,所述第一多级液压缸、所述第二多级液压缸的缸体固定在所述接驳浮体甲板上,所述第一多级液压缸、所述第二多级液压缸的伸缩杆上固定有滑道,所述滑道配合有滑块,所述滑块与所述下船平台铰接。
6.所述转盘架上固定有转盘,在所述转盘架靠近岸边的一侧,设置有下船板,所述下船板一侧与所述转盘架轴连接,所述下船板可绕轴旋转。当下船板不使用时,可将下船板收回。接驳浮体通过下船平台与客滚船相连接,接驳浮体通过下船板与岸边对接。由于大型车辆在接驳浮体上没有足够的转弯空间,大型车辆需要先经由下船平台开到转盘上,转动转盘,将大型车辆的车头变换方位,当大型车辆的车头朝向码头时,转盘停止,大型车辆经由下船板开到岸上。
7.所述接驳浮体上还设置有控制台,通过所述控制台可分别对所述第一多级液压缸、所述第二多级液压缸进行操控。大型车辆在开到接驳浮体上面的时候,接驳浮体会产生偏颇,通过控制台对第一多级液压缸、第二多级液压缸进行控制,保证接驳浮体的稳定性,进而保证大型车辆可以平稳的经客滚船进入码头。控制台可以分别对第一多级液压缸、第二多级液压缸进行操控,可以对第一多级液压缸、第二多级液压缸进行不同高度的调节,进而保证接驳浮体甲板保持水平,进而保证接驳浮体整体呈平稳状态。
8.上述一种可操控液压托举式客滚船接驳装置,更进一步地,所述控制台控制有液压泵,所述液压泵连接有单向阀,所述单向阀通过管路分别连接有第三换向阀、第四换向阀、三位四通阀,所述三位四通阀通过管路依次连接有第一调速阀、分流集流阀,所述分流
集流阀伸出两个支路,第一支路通过管路依次连接有第五换向阀、第一换向阀、第一液控单向阀、第一多级液压缸,第二支路通过管路依次连接有第六换向阀、第二换向阀、第二液控单向阀、第二多级液压缸;所述第一多级液压缸和所述第二多级液压缸汇集后,通过管路经由第二调速阀、三位四通阀连接回油箱,所述单向阀还连接有溢流阀。控制台可以根据接驳浮体在使用时的情况不同,通过操作控制台,对系统内的原件进行控制,进而对第一多级液压缸、第二多级液压缸进行控制,进而保证接驳浮体的稳定性。
9.上述一种可操控液压托举式客滚船接驳装置,更进一步地,所述第一换向阀、所述第二换向阀通过管路连接回油箱;所述第五换向阀、所述第六换向阀通过管路连接回三位四通阀;所述第一液控单向阀、所述第二液控单向阀通过管路连接回油箱。
10.上述一种可操控液压托举式客滚船接驳装置,更进一步地,所述第一多级液压缸、所述第二多级液压缸分别设置在所述下船平台一侧的两端,所述缸体上设置有位移传感器。位移传感器输出信号与数据采集其输入端相连接,数据采集器与控制台相连接,控制台接收位移传感器信号,并做出下一步指令。
11.上述一种可操控液压托举式客滚船接驳装置,更进一步地,所述接驳浮体靠近岸边的一侧,通过抱柱式系泊装置与岸边固定;所述接驳浮体远离岸边一侧,通过定位桩支撑。在拖航或恶劣海况等情况下定位桩可上升收回,在工作情况下插入岸底,定位桩通过销轴与接驳浮体径向固定。
12.上述一种可操控液压托举式客滚船接驳装置,更进一步地,所述接驳浮体与所述定位桩连接处设置有水平侧位仪,所述第一多级液压缸、所述第二多级液压缸与所述接驳浮体相连接处,设置有水平侧位仪。水平侧位仪在测得信号后,将信号输出给数据采集其输入端相连接,数据采集器与控制台相连接,控制台接收传感器信号,并做出下一步指令。
13.上述一种可操控液压托举式客滚船接驳装置,更进一步地,所述下船平台远离所述转盘一端、下方固定有支撑柱。当第一多级液压缸、第二多级液压缸带有的伸缩杆完全收回至液压缸腔体内时,第一多级液压缸和第二多级液压缸支撑不了下船平台,下船平台远离转盘架的一端就锁定在支撑柱上,支撑柱对下船平台进行支撑。
14.上述一种可操控液压托举式客滚船接驳装置,优选地,所述定位桩可上升收回,通过销轴固定在所述接驳浮体下方。
15.上述一种可操控液压托举式客滚船接驳装置,优选地,客滚船带有的尾门与所述下船平台相连接。客滚船通过尾门与下船平台进行连接,进而将客滚船与接驳浮体对接,进而使客滚船与码头对接。
16.本发明适用于码头空间有限、需要接驳大型车辆(车身长15
‑
22米)的情况,本发明采用基于液压托举的客滚船汽车浮体式接驳,其具有良好的适用性、稳定性,具有场地适应能力强、搭建快速、可移动、多港口重复利用的特点,不但提高码头接卸能力,同时节省大量建造成本,可适用于不同水位工况,及与不同船型的尾门对接。在汽车接驳过程中整体载荷变化平缓,通过调整下船平台双侧托举液压缸的伸缩量,从而控制车辆在移动过程中的水平稳性,克服了浮式装置调载困难的问题。带有的控制台易于操作,可实现同步及异步多功能调节方式,从而保持车辆移动时的稳性。
附图说明
17.图1是本发明整体结构俯视图;
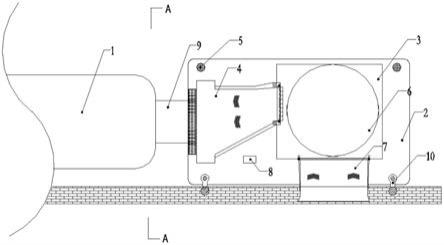
18.图2是本发明接驳浮体结构侧视图;
19.图3是图1中a
‑
a视角的结构示意图;
20.图4是本发明控制台系统图;
21.其中:1
‑
客滚船、2
‑
接驳浮体、3
‑
转盘架、4
‑
下船平台、5
‑
定位桩、6
‑
转盘、7
‑
下船板、8
‑
控制台、9
‑
尾门、10
‑
抱柱式系泊装置、11
‑
第一多级液压缸、12
‑
第二多级液压缸、13
‑
水平侧位仪、14
‑
位移传感器、15
‑
支撑柱、16
‑
液压泵、17
‑
单向阀、18
‑
第三换向阀、19
‑
第四换向阀、20
‑
三位四通阀、21
‑
第一调速阀、22
‑
分流集流阀、23
‑
第五换向阀、24
‑
第一换向阀、25
‑
第一液控单向阀、26
‑
第六换向阀、27
‑
第二换向阀、28
‑
第二液控单向阀、29
‑
第二调速阀、30
‑
油箱、31
‑
溢流阀。
具体实施方式
22.下面结合附图对本项发明作进一步说明,如图1、2、3所示的一种可操控液压托举式客滚船接驳装置,有客滚船1和接驳浮体2,接驳浮体长53米,宽30米。
23.接驳浮体靠近岸边的一端通过抱柱式系泊装置10与码头支撑固定,接驳浮体远离岸边的一端通过定位桩5支撑固定,定位桩可上下升降,当接驳浮体工作时,定位桩插入海底固定,定位桩与接驳浮体的主体通过销轴径向固定。当遇到拖航或恶劣海况时,定位桩上升收回。接驳浮体的甲板上依次固定有下船平台4和转盘架3,转盘架上固定有转盘6,转盘架靠近岸边一侧还设置有下船板7,下船板与转盘架轴连接,接驳浮体通过下船板与码头对接,当下船板不使用时,下船板可绕轴运动,将下船板收回。
24.下船平台一侧与转盘架铰接,另一侧的两端分别设置有第一多级液压缸11和第二多级液压缸12。第一多级液压缸、第二多级液压缸的缸体固定在接驳浮体的主甲板上,第一多级液压缸、第二多级液压缸带有的伸缩杆与下船平台滑动连接。伸缩杆上固定有滑道,下船平台带有与滑道相配合的滑块,滑块与下船平台铰接,第一多级液压缸、第二多级液压缸伸缩带动下船平台上、下活动,进而可以调节下船平台的角度。下船平台远离转盘架的一侧下方还设置有支撑柱15,当第一多级液压缸、第二多级液压缸的伸缩杆完全收回液压缸腔体内时,下船平台固定在支撑柱上,通过支撑柱对下船平台进行支撑。
25.下船平台与客滚船带有的尾门9连接,进而保证接驳浮体与客滚船对接。通过控制台8对第一多级液压缸、第二多级液压缸进行操作,调整下船平台的高度,使其与客滚船尾门对接成功。
26.接驳浮体与定位桩连接处设置有水平侧位仪13,第一多级液压缸、第二多级液压缸与接驳浮体相连接处,设置有水平侧位仪。第一多级液压缸、第二多级液压缸的缸体上设置有位移传感器14。水平侧位仪、位移传感将检测到的信号通过数据采集器传送给控制台,控制台根据接收到的信号,做出下一步指令。
27.控制台可分别对第一多级液压缸、第二多级液压缸进行控制,根据实际情况,调节第一多级液压缸、第二多级液压缸的高度,保证下船平台与客滚船对接成功,大型车辆接驳平稳。
28.当客滚船停船靠岸,已通过抱柱式系泊装置及定位桩固定于码头的接驳浮体处于
工作状态。通过调整压载水,使接驳浮体与岸站及客滚船相对高度适宜,随后固定定位桩销轴,保持接驳浮体与定位桩径向固定。定位后控制台控制第一多级液压缸、第二多级液压缸同步顶升,使下船平台与客滚船尾门平滑对接。汽车从客滚船尾门开出,经尾门、下船平台上到转盘,待停稳就位后,转盘顺时针旋转90度,此时车头朝向码头,随后汽车经下船板上岸。
29.在汽车从尾门经下船平台移动到转盘过程中,由于接驳装置瞬时载荷突变及受潮汐浪涌等影响,下船平台易产生小角度倾斜,从而影响车辆在移动过程中的稳性。所以在车辆下船过程中,需根据位移传感器及水平高差测量装置反馈的数据,通过控制台调整两侧液压缸的伸长补偿量而保证下船平台的水平。
30.如图4所示,当下船平台处于工作状态时,开启液压泵16,第一换向阀24、第二换向阀27、第三换向阀18、第四换向阀19、第五换向阀23、第六换向阀26处右侧位,三位四通阀20右侧位接通。液压油被液压泵16泵出后经单向阀17、三位四通阀20、第一调速阀21进入分流集流阀22,分流集流阀按一比一将油液分流。分流后分别经第五换向阀23、第六换向阀26、第一换向阀的24、第二换向阀27、第一液控单向阀25,第二液控单向阀28,进入第一多级液压缸11、第二多级液压缸12的无杆腔,两侧有杆腔中的油液汇流后经第二调速阀29、三位四通阀20返回油箱,从而使下船平台双侧同步抬起。第一调速阀21、第二调速阀29均为可调单向节流阀,油路从a到b有节流作用,从b到a油液自由流过。溢流阀31可控制油路压力,超压时油液通过溢流阀返回油箱30。
31.当下船平台双侧需同步下落时,第一换向阀24、第二换向阀27、第五换向阀23、第六换向阀26处右侧位,第三换向阀18、第四换向阀19处左侧位第三换向阀18、第四换向阀19换向触使第一液控单向阀25、第二液控单向阀28开启,此时三位四通阀20左侧位接通,油液经上述油路反向流通返回油箱30,分流集流阀22此时按一比一集流,两侧液压缸同步下落。
32.当接驳浮体产生倾斜时,下船平台产生偏载,水平测位仪测得第一多级液压缸11测量点与定位桩测量点水平高差为h1,第二多级液压缸12测量点与定位桩测量点水平高差为h2。此时控制台控制第二换向阀27、第三换向阀18、第四换向阀19、第五换向阀23、第六换向阀26处右侧位,第一换向阀24左侧位,三位四通阀20右侧位接通。液压油被液压泵16泵出后经单向阀17、三位四通阀20、第一调速阀21进入分流集流阀22,分流集流阀按一比一将油液分流。分流后流经第五换向阀23的一路油液经第一换向阀24后返回油箱,多级液压缸无杆腔内油液静止,杠杆保持不动。流经第六换向阀26的一路油液,经第二换向阀27、第二液控单向阀28进入第二多级液压缸12无杆腔,多级液压缸2的缸杆继续伸长,直到多级液压缸2的位移传感器显示杠杆伸长量为h2
‑
h1。此时下船平台水平,但与客滚船尾门之间仍产生高差。随后换向阀1返回右侧位,油箱泵出的油液经分流集流阀一比一分流后流经第五换向阀23、第六换向阀26、第一换向阀的24、第二换向阀27进入第一多级液压缸11、第二多级液压缸12的无杆腔,伸缩杆同时伸长,当双侧位移传感器测得伸长量为h1时,三位四通阀切回中位,下船平台与客滚船尾门平滑对接。
33.在此状态下下船平台下落时,控制第一换向阀24、第二换向阀27、第三换向阀18、第五换向阀23处右侧位,第四换向阀19、第六换向阀26处左侧位,第四换向阀19的换向触使第二液控单向阀28开启,三位四通阀左侧位接通。油箱泵出的油液经液压泵、单向阀、三位四通阀、第二调速阀后进入第二多级液压缸12的有杆腔,第一多级液压缸油液静止,第二多
级液压缸无杆腔内的油液经第二换向阀27、第六换向阀26、第一调速阀21、三位四通阀流回油箱,第二多级液压缸12杠杆下降。待第二多级液压缸12的位移传感器测得伸缩杆回收距离为h2
‑
h1时,第六换向阀26返回右侧位,第三换向阀18切换左侧位,触使液控单向阀17开启,其他换向阀保持不变,随后第一多级液压缸11、第二多级液压缸12无杆腔中的油液分别经液控单向阀17、第二液控单向阀28、第一换向阀24、第二换向阀27、第五换向阀23、第六换向阀26按一比一流入分流集流阀,又经第一调速阀21、三位四通阀返回油箱,第一多级液压缸11与第二多级液压缸12同步下落返回初始状态。
34.同样的方法,根据水平测位仪及位移传感器数值,并通过切换换向阀及三位四通阀的位置,可控制在接驳浮体近岸侧上浮摆动情况下的下船平台稳定性。
35.本发明适用于接驳长度为15
‑
22米的大型车辆,由于码头空间有限,大型车辆在接驳过程中需90
°
转弯上岸,因此采用本发明可以有效解决大型车辆在码头空间有限的情况下,接驳稳定上岸的问题。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。