1.本实用新型属于吊装设备技术领域,具体涉及一种多吊点升降高差监测装置。
背景技术:
2.吊装作业的起升同步往往是起重行业的重要保证指标,为确保多个吊点的同步起升,且能自动调整吊点起升速度,通常是在起重设备的吊点上安装有测量钢丝绳收放长度的传感器,或在起重吊点处的受力部位安装测力传感器,通过测量吊点运行的量程或吊点受力的大小来判断起重设备吊点是否同步工作。然而,如果起重物起重高度过高,或运行距离过长时,传感器的精度将会大大降低,特别是通过多圈编码器测量卷筒中钢丝绳长度来控制吊运速度的方式,如果升降高度过长,则卷筒的每层钢丝绳周长都不一样,结果会带来很大的积累误差;而用于起重吊点的称重传感器精度一般都不高,误差有
±
5%,无法满足高精度吊装工况的需求。因此,需要一种新的技术方案解决此类问题。
技术实现要素:
3.针对上述现有技术中的不足,本实用新型提供了一种多吊点升降高差监测装置,用以对多个起重吊点实现稳定、同步、高精度的提升工作。
4.本实用新型通过以下技术方案实施:一种多吊点升降高差监测装置,包括监测仪、多个起重机、控制系统。其中,所述监测仪在使用时放置于起重物之上,监测仪包括电子罗盘、倾角传感器、无线发送电台、蓄电池,所述电子罗盘用于检测监测仪摆放位置在水平面上的方向,所述倾角传感器为双轴结构,并用于测量起重物的水平面上二个互相垂直方向上的倾转角度,所述无线发送电台用于将电子罗盘与倾角传感器的检测信号对外发送,所述蓄电池用于为电子罗盘、倾角传感器、无线发送电台提供电源;多个所述起重机通过与起重物上多个吊点的连接对起重物实施吊装作业;所述控制系统用于接收无线发送电台发送的检测信号并控制起重机对多个吊点的升降速度,同时,控制系统可将电子罗盘的检测角度作为坐标轴图像信息进行显示,以供操作人员观测。
5.进一步的,所述控制系统包括无线接收电台、触摸屏,其中,所述无线接收电台用于接收所述无线发送电台发送的检测信号,所述触摸屏通过将无线接收电台接收的检测信号进行显示以供操作人员分析处理并实施控制,而后将控制信号发送给所述起重机,实现起重物吊装姿态的调整。
6.进一步的,所述控制系统还包括无线路由器、远程手机、远程电脑,所述无线路由器可将所述无线接收电台接收的检测信号调制为无线信号并发送至所述远程手机与所述远程电脑之中。
7.进一步的,所述起重机数量为四个,并将其四个下垂的钢丝绳分别连接于起重物的四个吊点之上。
8.进一步的,所述触摸屏可显示起重物四个吊点连线所成坐标轴的图像,并同时显示所述电子罗盘0刻度所处的坐标轴图像,上述二个坐标值之间的夹角与电子罗盘的检测
角度相等。
9.本实用新型的有益效果是:
10.本实用新型利用监测仪直接放置于起重物上,通过电子罗盘与倾角传感器分别测量起重物的扭动与倾斜,而后将信息传送到驾驶室内,中间没有任何数据转换过程,能直接通过数据判断起重物的姿态并加以控制,具有测量精度高、同步性能好、累计误差小、适用范围广的优点,并且安装维护方便简单,安装时利用电子罗盘的检测及触摸屏的双坐标显示功能可随意摆放监测仪的角度,同时有利于操作者的直观判断与快速控制,免去了繁琐的起重调校工作,此外,本实用新型还能满足高寒、高海拔地区的应用,尤其适合于长距离、大重量吊装作业的应用,具有较好的实用价值。
附图说明
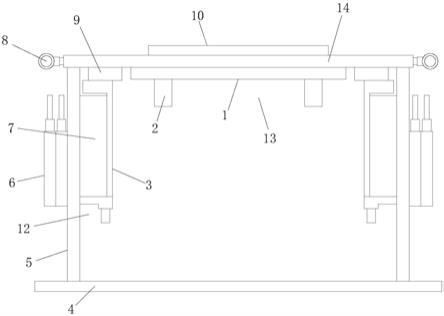
11.图1是本实用新型的局部结构示意图;
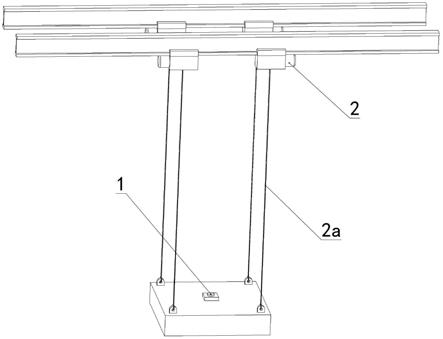
12.图2是本实用新型的功能结构图;
13.图3是本实用新型中监测仪正对吊点摆放的坐标示意图;
14.图4是本实用新型中监测仪随机摆放的坐标示意图。
15.图中:1
‑
监测仪,1a
‑
电子罗盘,1b
‑
倾角传感器,1c
‑
无线发送电台,1d
‑
蓄电池,2
‑
起重机,2a
‑
钢丝绳,3
‑
控制系统,3a
‑
无线接收电台,3b
‑
触摸屏,3c
‑
无线路由器,3d
‑
远程手机,3e
‑
远程电脑。
具体实施方式
16.下面结合说明书附图及实施例,对本实用新型作进一步的详细描述。
17.如图1
‑
2所示,一种多吊点升降高差监测装置,包括监测仪1、四个起重机2、控制系统3。其中,所述监测仪1在使用时放置于起重物之上,监测仪1包括电子罗盘1a、倾角传感器1b、无线发送电台1c、蓄电池1d,所述电子罗盘1a用于检测监测仪1摆放位置在水平面上的方向,所述倾角传感器1b为双轴结构,并用于测量起重物的水平面上二个互相垂直方向上的倾转角度,所述无线发送电台1c用于将电子罗盘1a与倾角传感器1b的检测信号对外发送,所述蓄电池1d用于为电子罗盘1a、倾角传感器1b、无线发送电台1c提供电源;四个所述起重机2通过其四个下垂的钢丝绳2a与起重物上四个吊点的连接对起重物实施吊装作业;所述控制系统3包括无线接收电台3a、触摸屏3b、无线路由器3c、远程手机3d、远程电脑3e,其中,所述无线接收电台3a用于接收所述无线发送电台1c发送的检测信号,所述触摸屏3b通过将无线接收电台3a接收的检测信号进行显示以供操作人员分析处理并实施控制,而后将控制信号发送给所述起重机2,实现起重物吊装姿态的调整;所述无线路由器3c可将所述无线接收电台3a接收的检测信号调制为无线信号并发送至所述远程手机3d与所述远程电脑3e之中,以便于远程调控。
18.如图3所示,在起重物上四个吊点中间放置监测仪1,监测仪1中电子罗盘1a0刻度对准正右端的吊点(方向依图3);在四个吊点中,左右吊点连接形成x轴、上下吊点连接形成y轴,通过x轴、y轴将起重物顶面分为(x 、y )、(x 、y
‑
)、(x
‑
、y )、(x
‑
、y
‑
)四个象限区域,并将上述吊点的xy坐标轴作为图像信息在触摸屏3b上显示,由于摆放电子罗盘1a的0刻度所指方向正对于x轴的正极方向,故而此时电子罗盘1a的坐标轴与吊点坐标轴重合,因此并不
作电子罗盘1a的坐标显示。当启动四个起重机2提升起重物时,如果双轴倾角传感器1b检测到x轴、y轴的倾角角度皆为正值,说明图3之中上端与右端的吊点提升速度过快,且(x 、y )象限区域所处的起重物平面过高,此时操作者通过触摸屏3b显示的数据进行控制,使上端、右端吊点所连接起重机2的提升速度减慢,直至倾角传感器1b在x轴、y轴检测到的倾角角度逼近0值;与此同理,当起重物于(x 、y
‑
)、(x
‑
、y )、(x
‑
、y
‑
)三个象限区域出现翘起,依照相同方式控制其他吊点的提升速度,以此保持起重物的水平并以此持续稳定的状态进行提升作业。
19.如图4所示,当操作者随意放置监测仪1使电子罗盘1a0刻度与四个吊点的xy坐标轴不重合,此时电子罗盘1a检测到摆放水平面的角度偏移,通过无线发送电台1c将信号输送给控制系统3,并在触摸屏3b上显示电子罗盘1a的x`y`坐标轴图像,x`y`坐标轴中的x`轴正极对应于电子罗盘1a0刻度所指方向,并且,x`轴与x轴夹角、y`轴与y轴夹角与电子罗盘1a所检测的偏移角相等,从而还原图4所示的监测仪1偏移状态。此时操作者照常启动四个起重机2提升起重物,当监测仪1内的倾角传感器1b检测到仅有y`轴出现正值,通过参照触摸屏3b中二个坐标值的对比图像,可直观判断出起重物四吊点xy坐标轴中的(x
‑
、y )象限区域翘起,而后通过触摸屏3b发送指令减慢左端及上端吊点所连接起重机2的提升速度,使起重物回到水平姿态;通过二个坐标轴的对比,依照相同方式控制其他吊点的提升速度,使起重物持续保持水平状态完成提升动作。
20.上文中,参照附图描述了本实用新型的具体实施方式。但是,在本领域的普通技术人员能够理解、不偏离本实用新型的精神和范围的情况下,还可以对本实用新型的具体实施方式作各种变更和替换,这些都落在本实用新型权利要求书所限定的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。