技术特征:
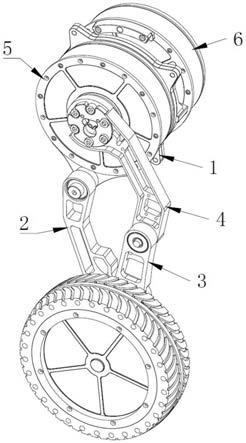
1.一种机器人用双驱动连杆结构,其特征在于:包括固定件,所述固定件设有第一旋转连接部;第一连杆,所述第一连杆包括第一连接端和第二连接端,所述第一连接端可活动连接于第一旋转连接部;第二连杆,所述第二连杆包括第一驱动连接部和第三连接端,所述第二连接端设有第二旋转连接部连接于第二连杆上;第三连杆,所述第三连杆设有第三旋转连接部,所述第三旋转连接部与第三连接端可旋转连接,所述第三连杆还设有第二驱动连接部;第一驱动组件,所述第一驱动组件安装于固定件、并与第二驱动连接部驱动连接;第二驱动组件,所述第二驱动组件用于驱动固定件;所述第一驱动组件包括基座、设于基座外沿的定子组件、设于基座内的转轴组件、及连接于转轴组件并罩设于定子组件的转子组件,所述基座包括内置端、外置端、及贯通于内置端和外置端的旋转安置腔,所述转轴组件可旋转安装于旋转安置腔,所述内置端安装有第一电路板,所述外置端开设有内置槽,所述内置槽安装有第二电路板,所述第一电路板与第二电路板连接。2.根据权利要求1所述的机器人用双驱动连杆结构,其特征在于:所述固定件设有托板,所述第一旋转连接部包括安装于托板的第一旋转轴、及安装于第一连接端的第一轴承,所述第一轴承与第一旋转轴连接;所述第一连接端开设有第一沉孔,所述第一轴承置于第一沉孔内,所述第二连接端开设有第二沉孔,所述第二旋转连接部通过第二沉孔与第二连杆连接;所述第一连杆开设有多个的减重槽;所述固定件连接有连接盘,所述连接盘设有限位挡板,所述第二驱动组件对应限位挡板设有限位块,所述限位块两侧设有限位台阶用于限位挡板限位;所述连接盘设有若干定位销,所述固定件对应定位销设有若干定位孔,所述定位销插设于定位孔。3.根据权利要求1所述的机器人用双驱动连杆结构,其特征在于:所述第一连杆包括第一直连部、第一弯曲部和第二弯曲部,所述第一直连部、第一弯曲部和第二弯曲部为一体加工成型,所述第一弯曲部与第二弯曲部之间设有限位筋,所述第一连接端设于第一直连部,所述第二连接端设于第二弯曲部;所述第一直连部与第一弯曲部之间的形成角度a,所述第一弯曲部与第二弯曲部之间形成角度b;所述角度a的角度为120
°
~170
°
;所述角度b的角度为110
°
~140
°
;所述第一直连部与第二弯曲部之间形成角度c,所述角度c的角度为70
°
~110
°
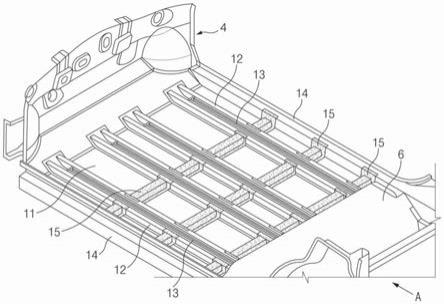
。4.根据权利要求1所述的机器人用双驱动连杆结构,其特征在于:所述第一驱动连接部开设有第一通槽,所述第二连杆设有第一走线槽,所述第一走线槽连通至第一通槽,所述第一走线槽靠近第三旋转连接部位置开设有第一穿槽,所述第一穿槽贯通于第二连杆;所述第一通槽一侧开设有第一引线孔,所述第一引线孔连通至第一走线槽;所述第一走线槽位于第一通槽的外沿开设有沉入台阶,所述沉入台阶以第一通槽为中心环向开设有若干个通孔;所述第一走线槽一体加工成型有连接柱,所述第二旋转连接部设于第一连接柱,所述第二旋转连接部包括第二旋转轴及第二轴承,所述第二轴承与第二旋转轴连接,所述第二
轴承设有两个,分别置于第一连杆和第二连杆。5.根据权利要求1所述的机器人用双驱动连杆结构,其特征在于:所述第三连杆包括第二直连部、第三弯曲部和第四弯曲部,所述第三旋转连接部设于第二直连部并与第三连接端连接,所述第二直连部、第三弯曲部和第四弯曲部为一体加工成型;所述第二直连部与第三弯曲部之间形成角度d,所述第三弯曲部与第四弯曲部之间形成角度e,所述第二直连部与第四弯曲部之间形成角度f;所述角度d的角度为120
°
~150
°
;所述角度e的角度为120
°
~160
°
;所述角度f的角度为80
°
~120
°
。6.根据权利要求5所述的机器人用双驱动连杆结构,其特征在于:所述第二驱动连接部开设有第二通槽,所述第三连杆开设有第二走线槽,所述第二走线槽连通于第二通槽,所述第二走线槽靠近第三连接端位置设有第二穿槽,所述第二穿槽贯通第三连杆。7.根据权利要求1所述的机器人用双驱动连杆结构,其特征在于:所述第二电路板对应内置槽一面设有第一感应元器件、对应旋转安置腔一面设有第二感应元器件,所述第一感应元器件对应设有感应元件,所述感应元件连接于转轴组件;所述第一感应元器件为侦测传感器、发光传感器、蜂鸣器或红外感应器中的一个或两个以上的组合;所述第二感应元器件为霍尔传感器,所述感应元件为磁性感应元件;所述内置端设有安置台,所述安置台外沿设有凸环,所述凸环开设有安装孔,所述第一电路板对应安装孔开设有通孔;所述安置台开设有若干个避空位,至少一个的避空位用于穿过连接线将第一电路板与第二电路板连接,所述第一电路板为控制电路板,所述第二电路板为感应电路板。8.根据权利要求7所述的机器人用双驱动连杆结构,其特征在于:所述外置端开设有穿孔,所述穿孔连通至避空位、用于穿入连接线与第一电路板连接;所述穿孔位于内置槽一侧;所述内置槽设有可通过感应信号的盖板;所述盖板为透明或半透明盖板。9.根据权利要求8所述的机器人用双驱动连杆结构,其特征在于:所述定子组件包括铁芯、及均布于铁芯的线圈,所述铁芯环向均布有若干太阳筋,所述线圈绕设于所述太阳筋;所述内置端的外径对应铁芯的内径开设有若干紧固槽;所述转轴组件包括安装于旋转安置腔的轴承件、及可旋转安装于轴承件的旋转轴,所述旋转轴一端与转子组件连接、另一端安装有固定元件,所述固定元件朝向于第二电路板;所述旋转安置腔开设有第一限位槽和第二限位槽,所述轴承件设有两个的轴承,两个轴承分别安装于第一限位槽和第二限位槽。10.根据权利要求9所述的机器人用双驱动连杆结构,其特征在于:所述转子组件包括连接于转轴组件的外端盖、连接于外端盖并对应于定子组件外沿的连接环、及安装于连接环并与定子组件对应的转子元件,所述连接环远离外端盖一侧连接有内端盖,所述内端盖可旋转连接于外端部的外径;所述外端盖设有加固台,所述加固台开设有连接孔,所述连接孔设有限位台,所述外端盖通过连接孔与转轴组件连接;所述内端盖连接有连接轴承,所述连接轴承套设于外置端的外径;所述第二驱动组件的结构与第一驱动组件的结构相同。
技术总结
本发明涉及机器人技术领域,具体涉及一种机器人用双驱动连杆结构,包括固定件,固定件设有第一旋转连接部;第一连杆,第一连杆包括第一连接端和第二连接端,第一连接端可活动连接于第一旋转连接部;第二连杆,第二连杆包括第一驱动连接部和第三连接端,第二连接端设有第二旋转连接部连接于第二连杆上;第三连杆,第三连杆设有第三旋转连接部,第三旋转连接部与第三连接端可旋转连接,第三连杆还设有第二驱动连接部;第一驱动组件,第一驱动组件安装于固定件、并与第二驱动连接部驱动连接;第二驱动组件,第二驱动组件用于驱动固定件;本发明采用了双驱动结构,使得机器人的腿部可做出各种动作,整体结构稳定可靠,实用性强。实用性强。实用性强。
技术研发人员:朱志龙 梁明强 刘鹰
受保护的技术使用者:东莞市本末科技有限公司
技术研发日:2021.09.27
技术公布日:2021/12/16
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。