1.本发明属于雷达技术领域,具体地说,是涉及一种基于注意力机制的中重频雷达目标检测方法。
背景技术:
2.雷达作为一种重要探测目标系统,目标精确检测能有效提高作战效率。当背景复杂且存在干扰和杂波时,传统雷达目标检测方法性能下降、漏检率上升,只有背景简单且目标的雷达的反射截面积大时,检测性能才较好。
3.因此,在复杂背景下快速处理雷达回波信号并具有高检测性能一直是雷达的研究热点。
技术实现要素:
4.本发明的目的在于提供一种基于注意力机制的中重频雷达目标检测方法,以提高雷达目标检测的性能。
5.本发明采用以下技术方案予以实现:
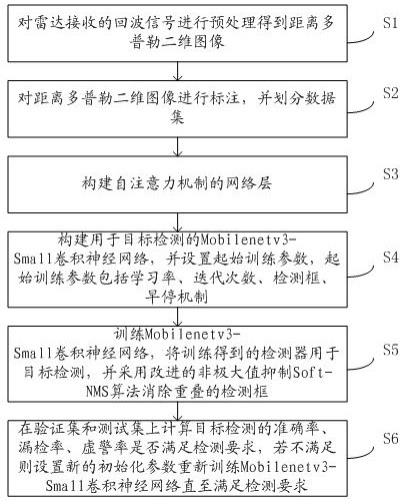
6.提出一种基于注意力机制的中重频雷达目标检测方法,包括以下步骤:
7.1)对雷达接收的回波信号进行预处理得到距离多普勒二维图像;
8.2)对所述距离多普勒二维图像进行标注,并划分数据集;
9.3)构建自注意力机制的网络层;
10.4)构建用于目标检测的mobilenetv3
‑
small卷积神经网络,并设置起始训练参数,所述起始训练参数包括学习率、迭代次数、检测框、早停机制;
11.5)训练所述mobilenetv3
‑
small卷积神经网络,将训练得到的检测器用于目标检测,并采用改进的非极大值抑制soft
‑
nms算法消除重叠的检测框;
12.6)在验证集和测试集上计算目标检测的准确率、漏检率、虚警率是否满足检测要求,若不满足则设置新的初始化参数重新训练所述mobilenetv3
‑
small卷积神经网络直至满足检测要求。
13.进一步的,步骤1具体包括:
14.11)对雷达接收的回波信号沿慢时间方向和快时间方向分别做一次傅里叶变换;
15.12)对经过步骤11处理的信号做傅里叶平移变换和取绝对值;
16.13)对12处理的信号归一化得到所述距离多普勒矩阵。
17.进一步的,步骤2中,对所述距离多普勒二维图像进行标注,具体包括:
18.设定标注框为(x1,y1,x2,y2);其中x1,y1为标注框的左上角横纵坐标,x2,y2为标注框的右下角横纵坐标;
19.将标注框转化成中心点坐标表示
20.进一步的,步骤3中构建的自注意力机制的网络层,包括2层编码层,每层编码层包
括自注意力机制和前馈神经网络两个子层;每个自注意力机制层包括维度为d
k
的三个向量:query、key、values,采用q、k、v代替,通过计算q、k的点积并除以尺度系数得到q、k对应的权重信息;使用softmax对权重函数归一化并对v进行加权求和,得到注意力值;其中,注意力算法采用实现。
21.进一步的,步骤4中mobilenetv3
‑
small卷积神经网络包括12个bottleneck层,一个标准卷积层,两个逐点卷积层;其中,每个bottelneck包括两个逐点卷积层和一层深度卷积层。
22.进一步的,步骤4中设置起始训练参数,具体包括:
23.设置100个epoch;初始学习率为0.001;设置学习率下降机制:在第60个epoch、第80个epoch学习率分别下降1/10;检测框尺寸为16;早停机制:当泛化错误在连续5个周期内增长时则停止更新。
24.进一步的,在步骤5训练所述mobilenetv3
‑
small卷积神经网络中,目标回归的损失函数为:
[0025][0026]
其中,a,b分别为预测框和真实框;预测框a坐标为(x1,y1,x2,y2),真实框b坐标为:表示预测框和真实框的交并比,b,b
gt
分别表示预测框和真实框的中心点,ρ表示两个中心点的欧式距离,c表示能够同时包含预测框和真实框的最小闭包区域的对角线距离
[0027]
进一步的,在步骤5采用改进的非极大值抑制soft
‑
nms算法消除重叠的检测框,计算如下:
[0028][0029]
其中,d表示所有保留的有效框集合,b
i
表示待过滤的第i个预测框,s
i
表示第i个预测框对应的分类score;使用高斯函数作为惩罚项,当iou=0时,分类score不变;当0<iou<1时,分类score会衰减
[0030]
进一步的,在步骤6中,准确率定义为:漏检率:虚警率:其中,n
tp
为真实目标被预测为真目标的个数,n
fp
为假目标被预测成真目标的个数,n
fn
为真实目标被预测为假目标,n
tn
为假目标被预测成假目标的个数。
[0031]
与现有技术相比,本发明的优点和积极效果是:本发明提出的基于自注意力机制的中重频雷达目标检测方法中,利用自注意力机制在低感受野层增强了雷达回波信号的特征;利用mobilenet
‑
small网络进行雷达目标检测,轻量化的网络保证了处理速度和准确
率;设置了固定大小的检测框,更好的符合当前数据集的特点,提高了检测器的效率和准确率;引入soft
‑
nms消除重叠框从而使得最终的检测结果更加准确,使得本发明具有实现简单、检测快且精度高、适用于需快速精确决策的系统的技术优点。
[0032]
结合附图阅读本发明实施方式的详细描述后,本发明的其他特点和优点将变得更加清楚。
附图说明
[0033]
图1为本发明提出的基于注意力机制的中重频雷达目标检测方法的流程图;
[0034]
图2为本发明提出的基于注意力机制的中重频雷达目标检测方法的示意图;
[0035]
图3为本发明雷达回波信号预处理后的二维图像;
[0036]
图4为本发明提出的基本网络框架示意图;
[0037]
图5为本发明中数据集检测框的宽高分布示意图;
[0038]
图6为本发明基于注意力机制的中重频雷达目标检测器的检测结果示意图。
具体实施方式
[0039]
下面结合附图对本发明的具体实施方式作进一步详细的说明。
[0040]
如图1和图2所示,本发明提出的基于注意力机制的中重频雷达目标检测方法,包括如下步骤:
[0041]
步骤s1:对雷达接收的回波信号进行预处理得到距离多普勒二维图像。
[0042]
在本发明实施例中,具体包括以下步骤:
[0043]
步骤s11:对接收的雷达回波的时间序列信号,沿慢时间方向和快时间方向分别先做一次傅里叶变换。
[0044]
步骤s12:在步骤s11的处理基础上做一次傅里叶平移变换和取绝对值。
[0045]
步骤s13:在步骤s12的处理基础上归一化得到距离多普勒矩阵,显示到图像上会有几个点,如图3所示。
[0046]
步骤s2:对距离多普勒二维图像进行标注,并划分数据集。
[0047]
在本发明实施例中,利用labelimg开源标注软件对多普勒二维图像进行标注,标注框为(x1,y1,x2,y2);其中x1,y1为标注框的左上角横纵坐标,x2,y2为标注框的右下角横纵坐标;将标注框转化成中心点坐标表示:
[0048][0049]
离线训练网络时有多段雷达回波信号,以段为单位按照8:1:1划分训练集、验证集、测试集,每段数据包含多帧连续数据。
[0050]
步骤s3:构建自注意力机制的网络层。
[0051]
在本发明实施例中,构建self
‑
attention注意力机制的网络层,该网络层包括2层编码层,每层编码层包括自注意力机制和前馈神经网络两个子层。
[0052]
每个自注意力机制层包括维度为d
k
的三个向量:query、key、values,采用q、k、v代替;通过计算q、k的点积并除以一个尺度系数可得到q、k对应的权重信息;再使用
softmax对权重函数归一化并对v进行加权求和,最终可得到注意力值,注意力算法采用实现。
[0053]
步骤s4:构建用于目标检测的mobilenetv3
‑
small卷积神经网络,并设置起始训练参数,所述起始训练参数包括学习率、迭代次数、检测框、早停机制。
[0054]
在本发明实施例中,构建mobilenetv3
‑
small网络如图4所示,mobilenetv3
‑
small相比于yolov5拥有更轻量级的网络,且使用的深度可分离卷积网络计算量小且快,满足快速计算的性能要求。该mobilenetv3
‑
small网络共有12个bottleneck层,一个标准卷积层,两个逐点卷积层,其中每个bottelneck包括两个逐点卷积层和一层深度卷积层。
[0055]
设置起始训练参数如下:
[0056]
设置100个epoch;
[0057]
初始学习率为0.001;
[0058]
设置学习率下降机制:在第60个epoch、第80个epoch学习率分别下降1/10;batchsize为16;
[0059]
早停机制:当泛化错误在连续5个周期内增长时则停止更新。
[0060]
统计距离多普勒中目标的像素点个数,如图5所示,距离多普勒目标是几个像素点,统计所有的目标像素点长宽,将检测框设为(8,8)大小。
[0061]
步骤s5:训练mobilenetv3
‑
small卷积神经网络,将训练得到的检测器用于目标检测,并采用改进的非极大值抑制soft
‑
nms算法消除重叠的检测框。
[0062]
训练使用的目标回归的损失函数为:
[0063][0064]
其中,a,b分别为预测框和真实框;预测框a坐标为(x1,y1,x2,y2),真实框b坐标为:表示预测框和真实框的交并比,b,b
gt
分别表示预测框和真实框的中心点,ρ表示两个中心点的欧式距离,c表示能够同时包含预测框和真实框的最小闭包区域的对角线距离。
[0065]
使用soft
‑
nms消除存在的重叠候选框,soft
‑
nms计算如下:
[0066][0067]
其中,d表示所有保留的有效框集合,b
i
表示待过滤的第i个预测框,s
i
表示第i个预测框对应的分类score。使用高斯函数作为惩罚项,当iou=0时,分类score不变;当0<iou<1时,分类score会衰减。
[0068]
步骤s6:在验证集和测试集上计算目标检测的准确率、漏检率、虚警率是否满足检测要求,若不满足则设置新的初始化参数重新训练所述mobilenetv3
‑
small卷积神经网络直至满足检测要求。
[0069]
准确率定义为:漏检率:虚警率:其中,n
tp
为真实目标被预测为真目标的个数,n
fp
为假目标被预测成真目标的个数,n
fn
为真实目标被预测为假目标,n
tn
为假目标被预测成假目标的个数。
[0070]
如图6所示,为使用soft
‑
nms算法消除存在的重叠候选框的检测结果,用识别准确率、漏检率、虚警率对检测进行评估如下:真实目标一共有3个,注意力机制的mobilenet
‑
small目标检测器正确检测出3个目标,准确率为100%,漏检率为0,虚警率为0。
[0071]
应该指出的是,上述说明并非是对本发明的限制,本发明也并不仅限于上述举例,本技术领域的普通技术人员在本发明的实质范围内所做出的变化、改型、添加或替换,也应属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。