1.本发明涉及加速器的校准装置及方法,尤其涉及一种加速器射野几何与透视成像几何耦合校准装置及方法。
背景技术:
2.在cbct(锥形束ct)、透视图像引导摆位等透视图像的应用中,对于透视成像装置的几何参数有精度要求,在获取透视图像的同时需要得到形成透视图的投影透视成像装置的几何参数,这些几何参数指透视投影矩阵或与之等价的透视源坐标、成像平板坐标与方向等参数,这些几何参数需要以加速器的射野等中心为基准获得。
3.目前该领域的应用中,在获得透视装置的几何参数时,选取基准一般使用预先校准的纵横两组激光灯来标记射野坐标系下各坐标轴的方向,通过激光灯交点标记射野等中心位置。但这样的方法受激光灯校准的误差影响,并随着加速器的使用误差会发生递增。
技术实现要素:
4.发明目的:本发明的目的是提供一种减小误差影响的加速器校准装置及方法。
5.技术方案:本发明的一种加速器射野几何与透视成像几何耦合校准装置,其特征在于,所述装置包括透明材料制成的基体和嵌在基体内部的若干金属球。金属球数量至少为透视成像装置的数量的八倍,金属球直径为3
‑
10mm;任意四个球体不共面,其中一个金属球的球心位于基体的几何中心。
6.基体由有机玻璃制成,下端面为平面,其表面设有两组标记线,每组标记线包括一条竖直标记线和一条水平标记线,通过两组标记线中心点的两组水平面与竖直面交于基体的几何中心,通过两组标记线的水平面与竖直面的两条交线相互垂直。
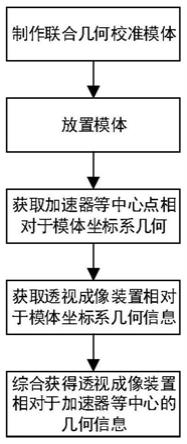
7.本发明所述的使用上述校准装置的加速器射野几何与透视成像几何耦合校准方法,包括如下步骤:
8.(1)将校准装置放于平台上,调整其位置确保校准装置同时处于加速器射野范围和透视成像装置成像范围内;
9.(2)旋转加速器机头,获得多于2个角度的加速器射野影像,根据这些影像中金属球在画面中的位置于金属球在模体坐标系下的坐标,获得加速器成像的几何信息,包括加速器机头、射野成像平板的坐标和角度;
10.(3)填充射野影像中金属投影区域并卷积获得射野中心投影坐标,并根据该角度的射野成像装置几何信息计算得射野该角度的三维射野中心射线;由多个角度的射野中心射线拟合得到其三维交点,即模体坐标系下的射野等中心点(x0,y0,z0);
11.(4)不移动模体,启动透视成像装置,获得透视影像,从透视影像中获得金属球二维投影坐标,与金属球三维坐标联立方程计算获得透视成像装置在模体坐标系下的几何投影矩阵表示的几何信息,矩阵为3x4的形式,联立方程如下:
[0012][0013]
其中p
ij
指投影矩阵第i行第j列的元素的值,(x
i
,y
i
,z
i
)指第i个金属球的三维坐标,(u
i
,v
i
,w
i
)为三维坐标的二维投影加权坐标,对应的二维投影坐标计算方法为:
[0014]
(5)根据步骤(3)获得的模体坐标系下的加速器射野中心点坐标形成模体坐标系原点到加速器中心点的平移向量(
‑
x0,
‑
y0,
‑
z0),代入步骤(4)获得的模体坐标系下的几何投影矩阵,最终通过下式形成最终的耦合加速器坐标系下的几何投影矩阵p:
[0015][0016]
模体坐标系按如下原则形成:以通过第一组标记线的水平面与竖直面交线为x轴,通过第二组标记线的水平面与竖直面的交线为y轴,根据右手定则由x轴和y轴形成z轴,以模体几何中心为坐标原点;记录模体坐标系下各个金属球的位置。
[0017]
有益效果:与现有技术相比,本发明具有如下显著优点:实现了加速器射野与透视成像耦合的几何校正方法,可实时获得相对于加速器射野的透视装置几何参数,避免了基于激光灯模体摆位的误差传递,提升了用于加速器图像引导的透视装置的几何精度,并且可将激光校准与透视成像几何校准流程合并,提升整体校正效率。
附图说明
[0018]
图1为本发明的流程图;
[0019]
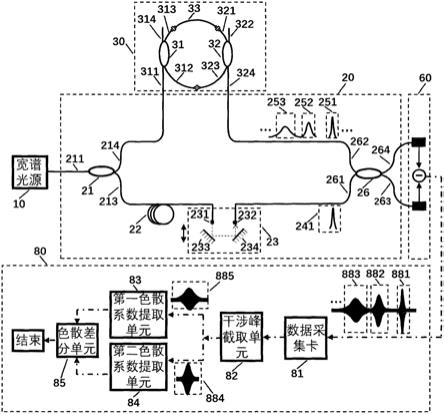
图2为本发明加速器射野与透视成像装置示意图;
[0020]
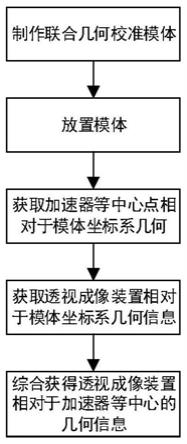
图3为本发明加速器多角度成像示意图。
具体实施方式
[0021]
下面结合附图对本发明的技术方案作进一步说明。
[0022]
实施例1的加速器射野几何与透视成像几何耦合校准装置由30个直径3mm的金属球嵌入有机玻璃制成的基体中制成,30个金属球各向非共面,基体下端面为平面,以平稳放置在台面;其中任意4个球体不共面,且有一个金属球球心位于基体的几何中心点;模体装置有两组标记线,每组标记线由一条水平标记线和一条竖直标记线组成,通过两组标记线中心点的两组水平面与竖直面交于基体的几何中心,通过两组标记线的水平面与竖直面的两条交线相互垂直。
[0023]
使用上述装置的加速器射野几何与透视成像几何耦合校准方法包括如下步骤:
[0024]
(1)将模体放置于加速器下,并调整其位置,确保模体同时处于加速器射野范围和透视成像装置成像范围内,对于已有激光灯的加速器治疗室,可直接利用激光灯放置于治疗床上,将两组激光灯的扫描线分别配准模体侧面的两组横竖标记线,使激光扫描线交点与模体标记线交点重合;这样的情况下,可认为激光坐标系与模体坐标系一致,可利用后续
射野中心几何直接校准激光标记系统;
[0025]
(2)旋转加速器机头,获得多于2个角度的加速器射野影像,根据这些影像中金属球在画面中的位置于金属球在模体坐标系下的坐标,获得加速器成像的几何信息;如图3所示获得2个角度的加速器射野影像后计算模体坐标系下射野等中心点的坐标,具体步骤如下:
[0026]
(21)这些成射野影像的角度需不平行且不近似平行,以便提升后续射野中心射线交点计算精度;
[0027]
(22)根据这些影像中金属球在画面中的位置于金属球在模体坐标系下的坐标,获得加速器机头、射野成像平板的坐标、角度等完备射野成像装置几何信息,每个角度生成一组这样的信息。这些信息包括:射野源点坐标、射野影像行列方向、射野影像基准点坐标,该几何参数即等价于三维坐标经过射野成像系统投影到射野影像上的二维坐标的3x4投影矩阵,该过程通过计算机自动优化,以获得能够精确拟合模体内金属点的投影点在图像坐标系下的坐标和其在模体坐标系下的三维坐标的投影矩阵;
[0028]
(23)通过填充射野影像中金属投影区域并卷积获得射野中心投影坐标,填充射野影像,通过射野影像内高于一定阈值的像素的值与其图像坐标的加权计算获得射野中心的图像坐标,结合投影矩阵可计算得到投影点坐标,等价于投影中心射线的几何信息;
[0029]
(24)如图3所示,由多个角度的射野中心射线拟合得到其三维交点,即模体坐标系下的射野等中心点,拟合过程为找到与各投影中心射线距离最小的点为射野等中心点;
[0030]
(3)填充射野影像中金属投影区域并卷积获得射野中心投影坐标,并根据该角度的射野成像装置几何信息计算得射野该角度的三维射野中心射线;由多个角度的射野中心射线拟合得到其三维交点,即模体坐标系下的射野等中心点;
[0031]
(4)不移动模体,启动透视成像装置,获得透视影像,并计算获得透视成像装置在模体坐标系下的几何信息,该步骤与(22)类似;
[0032]
(5)根据步骤(3)、(4)获得的加速器射野等中心点和透视成像装置的几何信息获得透视成像装置相对于加速器射野等中心点的耦合几何信息。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。