1.本实用新型涉及焊接工装技术领域,具体为一种用于硬管分水器的机器人亚弧焊接工装。
背景技术:
2.分、集水器(manifold)是水系统中,用于连接各路加热管供、回水的配、集水装置。地暖、空调系统中用的分水器材质宜为黄铜、自来水供水系统户表改造用的分水器多为pp或pe材质。供回水均设排气阀,很多分水器供回水还设有泄水阀。供水前端应设“y”型过滤器。供水分水管各支管均应设阀门,以调节水量的大小,分水器的连接方式多为焊接。
3.市场上手工氩弧焊焊接过程没有任何辅助工具,完全为操作人员依据手法操作,人为影响因素较多,从而造成焊接质量波动较大,为此,我们提出一种用于硬管分水器的机器人亚弧焊接工装。
技术实现要素:
4.本实用新型的目的在于提供一种用于硬管分水器的机器人亚弧焊接工装,以解决上述背景技术中提出的手工氩弧焊焊接过程没有任何辅助工具,完全为操作人员依据手法操作,人为影响因素较多,从而造成焊接质量波动较大的问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种用于硬管分水器的机器人亚弧焊接工装,包括:
6.移动组件;
7.所述移动组件包括:
8.底盘,所述底盘设置有阶梯状外形结构特征;
9.推杆,其设置于所述底盘上方,且推杆与底盘构成一体化结构,所述推杆右方设置有夹持机构;
10.所述夹持机构包括:
11.底框,所述底框内部设置有拉杆;
12.活块其设置于所述拉杆前方,所述活块前方上下两侧设置有连杆,所述连杆前方设置有滑块,所述滑块右方设置有滑竿,所述滑竿左方设置有滑槽,所述滑竿右方设置有滑轨,所述滑轨右方设置有夹块,所述夹块之间设置有凹槽,所述夹块后方设置有挡板,所述挡板右方设置固定机构。
13.优选的,所述底框与推杆构成一体化结构,且底框通过推杆与底盘构成可滑动结构,所述底盘表面为柔性材质。
14.优选的,所述拉杆固定在底框内部,且活块与拉杆构成一体化结构,所述连杆通过螺栓与活块构成可转动结构,且连杆通过螺栓与滑块构成可转动结构。
15.优选的,所述滑块与滑竿构成一体化结构,且滑竿与夹块构成一体化结构,所述滑竿通过滑槽与底框嵌合,且滑竿通过滑槽和滑轨与底框构成可滑动结构。
16.优选的,所述凹槽半径与夹块上圆弧的半径相等,且夹块与底框紧密贴合,所述底框与挡板构成一体化结构。
17.优选的,所述固定机构包括:
18.底座,所述底座上表面设置有置料槽;
19.限位板,其设置于所述置料槽右方,所述底座前后两侧设置有升降杆,所述升降杆上方设置有压板,所述压板下表面设置有压槽。
20.优选的,所述底座只可在底盘上前后滑动,且限位板与底座构成一体化结构,所述升降杆关于底座呈对称分布,且压板通过升降杆与底座构成可升降结构,所述置料槽的半径与压槽半径相等,且置料槽与压槽的位置相对应。
21.本实用新型提供了一种用于硬管分水器的机器人亚弧焊接工装,具备以下有益效果:该用于硬管分水器的机器人亚弧焊接工装,通过各部分零件之间的配合,提升了物料的加工效率和加工质量;
22.1、本实用新型通过移动组件的设置,使得推杆可以带动夹持机构向右移动,从而令物料之间相互接触,无需人工移动物料,提升了物料对接的精准性,且底盘的柔性表面可以避免产品落到底盘上时因碰撞而导致产品受损,提升了产品的加工质量;
23.2、本实用新型通过夹持机构的设置,使得拉杆可通过活块带动连杆移动,从而使滑块通过滑竿带动夹块移动,滑槽和滑轨对夹块的移动轨迹进行限制,从而使得夹块可以将凹槽内的物料夹持固定,避免物料在移动过程中发生移动,且不会妨碍物料加工,同时挡板可以对物料的位置进行限定,保证物料可以准确定位;
24.3、本实用新型通过固定机构的设置,使得升降杆可以带动压板下降,从而通过压槽对置料槽内的物料进行固定,避免物料在接触过程中发生偏移,同时限位板可以防止在物料的接触过程中,因受力而向右移动,导致物料间的接触不够紧密,从而影响加工效果,提升了物料的加工效率和加工质量。
附图说明
25.图1为本实用新型的剖视主视结构示意图;
26.图2为本实用新型的夹持机构右侧视结构示意图;
27.图3为本实用新型的固定机构左侧视结构示意图;
28.图4为本实用新型的底座立体结构示意图。
29.图中:1、移动组件;101、底盘;102、推杆;2、夹持机构;201、底框;202、拉杆;203、活块;204、连杆;205、滑块;206、滑竿;207、滑槽;208、滑轨;209、夹块;210、凹槽;211、挡板;3、固定机构;301、底座;302、置料槽;303、限位板;304、升降杆;305、压板;306、压槽。
具体实施方式
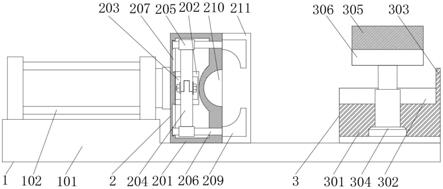
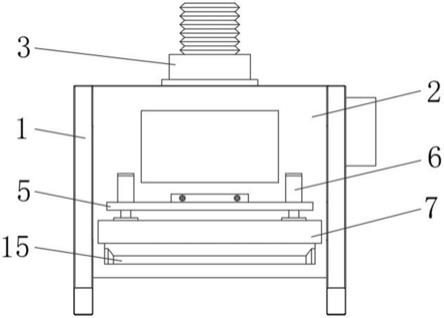
30.如图1所示,一种用于硬管分水器的机器人亚弧焊接工装,包括:移动组件1;移动组件1包括:底盘101,底盘101设置有阶梯状外形结构特征;推杆102,其设置于底盘101上方,且推杆102与底盘101构成一体化结构,推杆102右方设置有夹持机构2,底框201与推杆102构成一体化结构,且底框201通过推杆102与底盘101构成可滑动结构,底盘101表面为柔性材质,通过移动组件1的设置,使得推杆102可以带动夹持机构2向右移动,从而令物料之
间相互接触,无需人工移动物料,提升了物料对接的精准性,且底盘101的柔性表面可以避免产品落到底盘101上时因碰撞而导致产品受损,提升了产品的加工质量。
31.如图1和图2所示,夹持机构2包括:底框201,底框201内部设置有拉杆202;活块203,其设置于拉杆202前方,活块203前方上下两侧设置有连杆204,连杆204前方设置有滑块205,拉杆202固定在底框201内部,且活块203与拉杆202构成一体化结构,连杆204通过螺栓与活块203构成可转动结构,且连杆204通过螺栓与滑块205构成可转动结构,滑块205右方设置有滑竿206,滑竿206左方设置有滑槽207,滑竿206右方设置有滑轨208,滑轨208右方设置有夹块209,滑块205与滑竿206构成一体化结构,且滑竿206与夹块209构成一体化结构,滑竿206通过滑槽207与底框201嵌合,且滑竿206通过滑槽207和滑轨208与底框201构成可滑动结构,夹块209之间设置有凹槽210,夹块209后方设置有挡板211,凹槽210半径与夹块209上圆弧的半径相等,且夹块209与底框201紧密贴合,底框201与挡板211构成一体化结构,挡板211右方设置固定机构3,通过夹持机构2的设置,使得拉杆202可通过活块203带动连杆204移动,从而使滑块205通过滑竿206带动夹块209移动,滑槽207和滑轨208对夹块209的移动轨迹进行限制,从而使得夹块209可以将凹槽210内的物料夹持固定,避免物料在移动过程中发生移动,且不会妨碍物料加工,同时挡板211可以对物料的位置进行限定,保证物料可以准确定位。
32.如图1、图3和图4所示,固定机构3包括:底座301,底座301上表面设置有置料槽302;限位板303,其设置于置料槽302右方,底座301前后两侧设置有升降杆304,升降杆304上方设置有压板305,压板305下表面设置有压槽306,底座301只可在底盘101上前后滑动,且限位板303与底座301构成一体化结构,升降杆304关于底座301呈对称分布,且压板305通过升降杆304与底座301构成可升降结构,置料槽302的半径与压槽306半径相等,且置料槽302与压槽306的位置相对应,通过固定机构3的设置,使得升降杆304可以带动压板305下降,从而通过压槽306对置料槽302内的物料进行固定,避免物料在接触过程中发生偏移,同时限位板303可以防止在物料的接触过程中,因受力而向右移动,导致物料间的接触不够紧密,从而影响加工效果,提升了物料的加工效率和加工质量。
33.综上,该用于硬管分水器的机器人亚弧焊接工装,使用时,首先根据图1、图2图3和图4中所示的结构,将分水器主管放入凹槽210,使得分水器主管的后端紧贴挡板211并将主管上的孔洞朝向右方,然后拉杆202通过活块203带动连杆204移动,从而使滑块205带动滑竿206移动,滑竿206在滑槽207和滑轨208的限制下带动夹块209在底框201右表面移动,将凹槽210内的主管夹持并露出焊接部位,再将待焊接的管道放入置料槽302中并使得管道右端紧贴限位板303,升降杆304带动压板305下降,从而通过压槽306对置料槽302内的物料进行固定,然后调整底座301的位置使得管道正对主管上的孔洞,然后推杆102向右推动底框201,使得底框201带动主管在底盘101上向右移动至主管上的孔洞与待焊接的管道紧密贴合,然后机器人带动氩弧焊腔对物料进行焊接,焊接完成后升降杆304复位,推杆102带动底框201复位,然后拉杆202带动夹块209复位,产品从凹槽210中落到底盘101上,取出产品。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。