1.本实用新型涉及自动化领域,尤其涉及机械手、机械手指领域,具体为一种四爪自动找中气动串联套缸机械夹。
背景技术:
2.在自动化领域,机械手占有非常重要的位置,机械夹(或称为机械手指)更是重中之重。自动找中即在夹紧过程中自动找正中心。一般的自动找中机械夹有两爪、三爪机械夹,市面上有的所谓自动找中的四爪机械夹,实质上是同一动力驱动下四个机械爪同步向中心移动,总是止步于长度尺寸大的那对机械爪,另外一对机械爪处于非受力或非夹紧状态,受机械原理及被夹物夹紧方向公差大小的影响,此种四爪机械夹实际上是不能自动找中的。且这种机械四爪两夹紧连线方向一般为90度,不能更改。因此,实用新型一款能够真正自动找正中心,且两夹紧连线方向可以随工件形状改变的机械夹是自动化领域的迫切需求。
技术实现要素:
3.鉴于现有技术中所存在的问题,本实用新型公开了一种四爪自动找中气动串联套缸机械夹,采用的技术方案是,包括轴筒和机体;
4.轴筒:侧面的下表面与两个第一轴筒防尘块和两个第二轴筒防尘块的上表面固定连接,且两个第一轴筒防尘块和两个第二轴筒防尘块下表面的十字形滑槽分别与四个滑块的侧面滑动连接,且四个滑块的上表面均开设有齿槽,四个滑块下表面的中部均螺纹安装有手指杆,四个滑块外侧面中部的螺孔中均螺纹安装有内六方紧定,两个第一轴筒防尘块上端的内侧面与两个大齿轮的侧面中部转动连接,且两个大齿轮分别与横向的两个滑块上表面的齿槽啮合,两个第二轴筒防尘块上端的内侧面与两个小齿轮侧面的中部转动连接,且两个小齿轮分别与纵向的两个滑块上表面的齿槽啮合;
5.机体:通过四个内六方螺钉与轴筒连接,所述机体下端的内部为中空,机体内侧面的上侧与小活塞杆的侧面滑动连接,所述小活塞杆下端的侧面与大活塞杆的内侧面滑动俩内,且小活塞杆和大活塞杆的下端延伸至轴筒的内部,且大活塞杆和小活塞杆下端的侧面均开设有两组齿槽,且大活塞杆下端的侧面开设有与小活塞杆上两组齿槽对应的通槽,且两个通槽与大活塞杆上齿槽的方向垂直,大活塞杆上的两组齿槽分别与两个小齿轮啮合,小活塞杆上的两组齿槽分别与两个大齿轮啮合,所述机体上表面的中部通过紧固螺栓固定有紧固接头,且机体通过紧固接头与零点定位机体连接,所述紧固接头的内部设有零点定位体,所述零点定位机体的二面设有两个气动接头,且两个气动接头连通机体的内部。
6.作为本实用新型的一种优选技术方案,还包括第一o型密封圈、第二o型密封圈、第三o型密封圈和第四o型密封圈,所述第一o型密封圈和第二o型密封圈的内侧面与大活塞杆上端的侧面固定连接,且第一o型密封圈和第二o型密封圈与轴筒的内侧面接触,所述第三o型密封圈的内侧面小活塞杆中部的侧面固定连接,且第三o型密封圈的侧面与大活塞杆的
侧面接触,所述第四o型密封圈的内侧面与小活塞杆上端的侧面固定连接,且第四o型密封圈的侧面与机体的内侧面接触。
7.作为本实用新型的一种优选技术方案,还包括轴键和内六方螺钉,所述轴键设有四个,四个轴键分别设在四个手指杆中部的侧面,且四个滑块下表面开设有与四个轴键对应的凹槽,所述内六方螺钉设有八个,八个内六方螺钉分别与两个第一轴筒防尘块和第二轴筒防尘块侧面上下两侧的螺孔螺纹连接。
8.作为本实用新型的一种优选技术方案,还包括对直块,所述对直块固定在四爪盖下表面的中部。
9.作为本实用新型的一种优选技术方案,还包括定位轴销,所述定位轴销设有两个,两个定位轴销设在机体的上表面,且零点定位机体的下表面设有与两个定位轴销对应的孔。
10.本实用新型的有益效果:本实用新型机体内装有大活塞杆,大活塞杆内套有小活塞杆,大活塞杆和小活塞杆上都车有模数齿条,且都与扇形的大齿轮和扇形的小齿轮啮合,当大活塞杆和小活塞杆上下移动时带动大齿轮和小齿轮转动,大齿轮和小齿轮带动滑块在轴筒的滑槽内做相对直线运动,从而完成工件的夹紧和松开动作,并且大活塞杆和小活塞杆虽然套在一起,但气缸各自独立,且大活塞杆和小活塞杆的受力面积相等,这样每对卡爪在夹紧时都可自动对中,夹紧力一样,不致使卡爪止步于长度尺寸大的那个方向而另外一对机械爪处于非受力或非夹紧状态。
附图说明
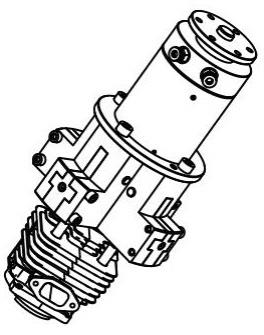
11.图1为本实用新型结构示意图;
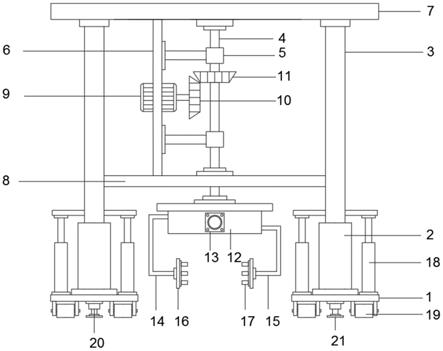
12.图2为本实用新型的内部正面剖视图;
13.图3为本实用新型的内部侧面剖视图;
14.图4为本实用新型的气路剖面视图。
15.图中:1轴键、2四爪盖、3手指杆、4内六角圆柱头螺钉、5滑块、6内六方紧定、7第一轴筒防尘块、8大齿轮、9第一o型密封圈、10第二o型密封圈、11小活塞杆、12第三o型密封圈、13第四o型密封圈、14零点定位体、15紧固接头、16紧固螺栓、17气动接头、18对直块、19小齿轮、20内六方螺钉ⅰ、21第二轴筒防尘块、22轴筒、23内六方螺钉ⅱ、24大活塞杆、25机体、26定位轴销、27零点定位机体。
具体实施方式
16.实施例1
17.如图1至图3所示,本实用新型公开了一种四爪自动找中气动串联套缸机械夹,采用的技术方案是,包括轴筒22和机体25;
18.轴筒22:侧面的下表面与两个第一轴筒防尘块7和两个第二轴筒防尘块21的上表面固定连接,且两个第一轴筒防尘块7和两个第二轴筒防尘块21下表面的十字形滑槽分别与四个滑块5的侧面滑动连接,且四个滑块5的上表面均开设有齿槽,四个滑块5下表面的中部均螺纹安装有手指杆3,四个滑块5外侧面中部的螺孔中均螺纹安装有内六方紧定6,两个第一轴筒防尘块7上端的内侧面与两个大齿轮8的侧面中部转动连接,且两个大齿轮8分别
与横向的两个滑块5上表面的齿槽啮合,两个第二轴筒防尘块21上端的内侧面与两个小齿轮19侧面的中部转动连接,且两个小齿轮19分别与纵向的两个滑块5上表面的齿槽啮合;
19.机体25:通过四个内六方螺钉ⅱ23与轴筒22连接,机体25下端的内部为中空,机体25内侧面的上侧与小活塞杆11的侧面滑动连接,小活塞杆11下端的侧面与大活塞杆24的内侧面滑动俩内,且小活塞杆11和大活塞杆24的下端延伸至轴筒22的内部,且大活塞杆24和小活塞杆11下端的侧面均开设有两组齿槽,且大活塞杆24下端的侧面开设有与小活塞杆11上两组齿槽对应的通槽,且两个通槽与大活塞杆24上齿槽的方向垂直,大活塞杆24上的两组齿槽分别与两个小齿轮19啮合,小活塞杆11上的两组齿槽分别与两个大齿轮8啮合,机体25上表面的中部通过紧固螺栓16固定有紧固接头15,且机体25通过紧固接头15与零点定位机体27连接,紧固接头15的内部设有零点定位体14,零点定位机体27的二面设有两个气动接头17,且两个气动接头17连通机体25的内部。
20.作为本实用新型的一种优选技术方案,还包括第一o型密封圈9、第二o型密封圈10、第三o型密封圈12和第四o型密封圈13,第一o型密封圈9和第二o型密封圈10的内侧面与大活塞杆24上端的侧面固定连接,且第一o型密封圈9和第二o型密封圈10与轴筒22的内侧面接触,第三o型密封圈12的内侧面小活塞杆11中部的侧面固定连接,且第三o型密封圈12的侧面与大活塞杆24的侧面接触,第四o型密封圈13的内侧面与小活塞杆11上端的侧面固定连接,且第四o型密封圈13的侧面与机体25的内侧面接触。
21.作为本实用新型的一种优选技术方案,还包括轴键1和内六方螺钉ⅰ20,轴键1设有四个,四个轴键1分别设在四个手指杆3中部的侧面,且四个滑块5下表面开设有与四个轴键1对应的凹槽,内六方螺钉ⅰ20设有八个,八个内六方螺钉ⅰ20分别与两个第一轴筒防尘块7和第二轴筒防尘块21侧面上下两侧的螺孔螺纹连接。
22.作为本实用新型的一种优选技术方案,还包括对直块18,对直块18固定在四爪盖2下表面的中部。
23.作为本实用新型的一种优选技术方案,还包括定位轴销26,定位轴销26设有两个,两个定位轴销26设在机体25的上表面,且零点定位机体27的下表面设有与两个定位轴销26对应的孔。
24.本实用新型的工作原理:通过零点机体27将机械夹固定在机械手上,将两个气动接头17与外部的供气管路接通,在夹取时,外部的压缩空气通过气动接头与17进入到机体25内部,内部的气动换向阀控制压缩空气从a到b到c,穿过大活塞杆24上的六个通孔到d,推动大活塞杆24和小活塞杆11上升,从而带动大齿轮8和小齿轮19相对内旋,大齿轮8和小齿轮19带动两对滑块5同步向内滑动,使两对手指杆3同时向内部移动,实现夹紧动作,气动回路从g、h到f到e,再通过气动换向阀、消声器排入大气中,在松开时,内部的气动换向阀控制压缩空气从e到f到g、h,推动大活塞杆24和小活塞杆11下降,从而带动大齿轮8和小齿轮19相对外旋,大齿轮8和小齿轮19带动两对滑块5同步向外滑动,实现松开动作,气动回路从d穿过大活塞杆24上的六个通孔到c到bz再到a,再通过气动换向阀、消声器排入大气中。
25.需要说明的是:大活塞杆24上的环形受力面积等于小活塞杆11的环形受力面积,所以两对滑块5的夹紧力是一样的。
26.本文中的机械夹可根据使用的情况可以做成轴型,也可借用三爪卡盘上的正反爪,还可根据工件形状做成异型爪。
27.上述虽然对本实用新型的具体实施例作了详细说明,但是本实用新型并不限于上述实施例,在本领域普通技术人员所具备的知识范围内,还可以在不脱离本实用新型宗旨的前提下做出各种变化,而不具备创造性劳动的修改或变形仍在本实用新型的保护范围以内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。